Walkera QR X350

да просто я не сталкивался в такой штукой как 3dr
по ссылке выше исчерпывающая информация
Владислав, сасибо за интересную ссылку!
Скажите, а автопилот для полета по заданным точкам можно на наш аппарат поставить?
Судя по некоторым отзывам, полет по точкам в X350 есть, вот только конечная точка всегда в Китае. 😃
А почему бы и не обсуждать АРДУПИЛОТа, на валкере? Что в ней еще обсуждать, закрытый контроллер, или как калибровать сенсоры, так это тупиковое развитие темы.
Мне например тоже интересно, вал-ку подружить с ардупилотом. Уже заказан.
А почему бы и не обсуждать АРДУПИЛОТа, на валкере?
А почему бы с таким же успехом не обсуждать и NAZA, или у владельцев X350 выработался устойчивый антиген к продукции DJI? По моему очень даже логично, сделать то, что не сделала Валкера, то-есть завершить копирование Фантома и наконец то сделать X350, похожим не только внешне но и начинкой. Ну а для поклонников Валкеры, останется гордая надпись на спине коптера, а что там у него внутри, можно никому и не говорить. 😃
А почему бы и не обсуждать АРДУПИЛОТа, на валкере?
Развитие темы модернизации считаю актуальной. Давайте обсудим в нашем обществе. Но доминирование QR X350 должно быть основой этого обсуждения. Если какой-то болтик подойдет от NAZA, наверное это тоже можно обсудить.
Почему QR X350 так часто пинают ногами и говорят что этот аппарат фигня? Я его приобрел для развития своих навыков управления и для того, чтобы вообще разбираться в этом деле. Возможно я потом куплю такой аппарат, что здесь его и сравнивать с чем-то будет вообще западло, мне что тогда всем говорить что они нищеброды, а я имею аппарат крутой?
Эта тема про ОПРЕДЕЛЕННУЮ модель. Можно обсудить её раскраску, дополнительные обвесы, девайсы совместимые и т.д. Обсуждение ардупилота именно с этим аппаратом - это в тему.
Обсуждение ардупилота именно с этим аппаратом - это в тему.
А смысл вам тут междусобойчик устраивать и по кругу задавать вопрсоы на которые уже есть ответы тут - А давайте обсудим Arducopter
Не ну если сильно хочется то обсуждайте тут.
Только там больше шансов получить правильный ответ - А давайте обсудим Arducopter
А он сможет летать и выполнять те же функции при обычном управлении с пульта? Если не использовать станцию, а летать как в стоковом варианте.
Да, сможет, наземная станция нужна для возможности менять миссию в реальном времени и видеть движение модели на карте Гугла. А так, планируешь миссию в программе, закидываешь в контроллер и полетел по точкам.
Только там больше шансов получить правильный ответ
Там новичку гораздо больше шансов получить помидор, а не ответ. А вкурить 190 страниц темы ему вряд ли будет под силу.
Фантик типа для проф съемки и более стабильный, точный и все такое, но что за стремная игрушечная аппа идет с ним в комплекте??? на нее смотреть даже не хочется
Эта аппа давно стала гламурной, модной и дальность у неё 1.5 км!
Только там больше шансов получить правильный ответ
Я бы сазал намного больше!
Праивльно всё.
А то обсуждать как затолкать дургие мозги в Валкеру - смысла не вижу.
Хотя нет - смысл есть - если как это внутри корпуса закрепить, с регулями скрестить и т.д.
А возможности полета мозгов - в теме что Евгений предложил и это правильно!
Обсуждение ардупилота именно с этим аппаратом - это в тему.
Мне например тоже интересно, вал-ку подружить с ардупилотом.
Я бы сазал намного больше!
Праивльно всё.
А то обсуждать как затолкать дургие мозги в Валкеру - смысла не вижу.
Хотя нет - смысл есть - если как это внутри корпуса закрепить, с регулями скрестить и т.д.
Учитывая, что интерес есть, будем обсуждать?😵
Предвидя вопросы, набросал вот такой маленький FAG.
- Почему Ардупилот, а не Наза, Вуконг, Зеро и т.д.?
Потому, что этот контроллер имеет массу функций, при смешной цене. Ибо он оупенсоурс, а не коммерческий проект. - Насколько сложно установить в QR X350 контроллер APM?
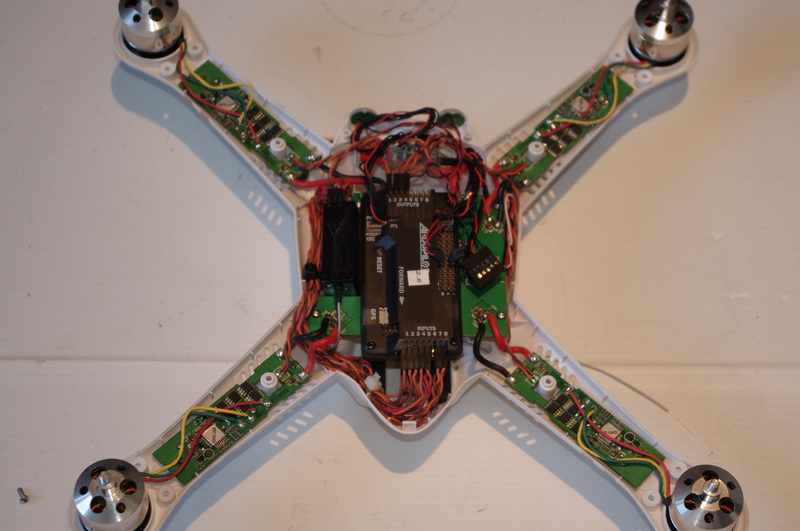
Установить просто, но надо немного дружить с руками, уметь паять на уровне *спаять два проводка*, а вот настроить- придется еще включить голову, но все в принципе достаточно просто, если не спешить, следовать инструкциям и не лезть туда, где не понимаешь. Также надо знать свою аппаратуру управления, уметь микшировать переключатели для активации тех или иных полетных режимов. Если до сих пор не разобрались, как активировать режим IOK на стоковой Валкере, то Ардупилот нормально настроить вам не удасться.
3.Что я приобрету- потеряю при замене стокового контроллера Deviation на Ardupilot?
Потеряете самую главную фишку Валкерки- простоту. Это ИМХО замечательный квадрик с GPS, компасом и барометром, который летает из коробки и может висеть в точке, возвращаться домой. Чтобы полететь на нем, новичку практически не надо никакой теории знать, зарядил батарею и полетел, и может даже и посадил.
Приобретете:
-14 полетных режимов, для примеру- “стабильный”- летает как и Валкера в ручном режиме,“loiter”- висит в точке, как и режим удержания в точке у Валкеры, “удержание высоты”-рулиться так же как и в стабильном, но удерживает высоту, если стик газа находиться в середине, "акробатический "- управляется как классический вертолет, может кувыркаться по осям крена и тангажа, “дрифт”- рулиться как самолет, работая только правым стиком можно нарезать круги, восьмерки, не заботясь о боковом скольжении, “круг”- коптер начинает кружить по заданному радиусу, носом к центру, очень интересное видео и фото получаеться, чтобы такое сделать руками, надо сотню часов тренировки минимум, “виртуальный забор” вокруг точки взлета создается виртуальная консервная банка, за пределы которой он улететь не может. Режим курслок, режим хоумлок, автофлип нажатием кнопки и т.д.
-запись полетного лога. В памяти контроллера и наземной станции храняться все данные о напряжении, работе датчиков, ЖПС,уровне вибраций и т.д. Очень удобно для настройки и разбора полетов. Эдакий черный ящик. Ведь даже Шаттлы и Боинги падают.
-полет по точкам заранее запрограммированной миссии с автоматическим взлетом, выполнением прописанных действий(фотографирование, сброс на парашюте баночки пива и т.д.) и автопосадкой. При наличии наземной станции возможность корректировать в полете миссию и наблюдать за ее выполнением на карте Гугла. - Что надо приобрести, и примерный бюджет?
Надо приобрести плату контроллера APM 2.5 или APM 2.6 в пластиковом корпусе с выводами коннекторов вбок (есть варианты с выводами коннекторов вверх, его в корпус уместить не получиться. Около 70-80$. Модуль GPS и компас покупать не надо, используется стоковые от Валкерки.

Удлинитель угловой microUSB, чтобы не разбирать каждый раз корпус для подключения контроллера к компьютеру.

Опционально, при желании иметь наземную станцию, нужен ноутбук или планшет с Андроидом не ниже 4.0. и комплект радиомодемов 3dr. Они бывают на частоту 433мгц и 915мгц.Около 40$.

Предвидя вопросы, набросал вот такой маленький FAG.
Молодец! спасибо! Для полноты вопроса выложи настройки свои для ардупилота и будет у людей “главная фишка валкеры - простота”. Те закрепил платку, все соединил, закинул настройки и получил большие плюсы к стандарту. Еще раз Спасибо за описание.
Владислав - отлично! Можете принимать заказы от пользователей на передлку) Думаю тут многие согласяться!
Просто купить корпус от Валкеры, регули, моторы, и т.д… и мозги ардупилота.
А Вы при желание переделаете!
Думаю будет успех))
Тут пол форума завидовать будут.
Спасибо за подробное описание!
А Земля и правда круглая!😉
Мороз -15С, Валкерка QR X350 со стоковыми мозгами, видеолинком 5,8ггц 600мвт, камера Мобиус.

Можете принимать заказы от пользователей на передлку) Думаю тут многие согласяться!
Это у меня хобби, не рассматриваю как способ добычи денег.
Просто купить корпус от Валкеры, регули, моторы, и т.д… и мозги ардупилота.
По запчастям покупать Валкерку под переделку невыгодно. Раза в два будет дороже, чем тушку без приемника купить. Да и смысл этих плясок в том,что если кому надоели стоковые мозги, вложить немного денег и труда- и более навороченая в плане функций игрушка получается. Вторая жизнь, так сказать.
P/S/ Ещё забыл, желательно сенсор тока и вольтажа добавить, около 8$.

Учитывая, что интерес есть, будем обсуждать?
Предвидя вопросы, набросал вот такой маленький FAG.
Вот это интересно! Спасибо!!!
Как говорится: Не останавливайтесь, рассказывайте )))
Есть вопрос. А вся эта трехомудия сколько в воздухе продержится с нашей батареей? Поднять, то поднимет… наверно.
Думаю пока учить теорию и запасаться контройлерами, а вот после выхода ЗИПа для X350 PRO запихать все в пузатый корпус вместе в бАльшой батареей и фигачить в воздухе кренделя минут 20 )))
Есть вопрос. А вся эта трехомудия сколько в воздухе продержится с нашей батареей? Поднять, то поднимет… наверно.
Вопрос не понятен мне. Ардупилот контроллер весит приблизительно столько же, как и родной Deviation. Значит и летать будет столько-же. Модем для наземной станции весит с антенной около 25гр.
Можно приблизительно считать, что каждый лишний грамм это минус одна секунда полета. Значит, если добавить модем, минус 25 секунд полета.
Вопрос не понятен мне.
Это я видимо о своем… Мне полет по точкам интересен, а при динамичном полете, а на автомате скорее всего именно так и получится, пролетит он 6 минут с “+” Так то не полет вовсе а болтанка, да даже если минут 12 взять в расчет, как врут очевидцы, это маловато для корректировки маршрута “на лету”. Но не верю я в 12 минут…
А в остальном то да, согласен.
На эту штуку много нареканий от пользователей в плане непонятных глюков во время работы?
Ну есть же примеры когда наша Валкера летает , а не просто зависает, с по-заводскому настроенной отсечкой по питанию - железно 12 минут! Вон у Романа Валкера летала безустали.
Ну а вообще батареи 2200 однозначно мало. Нужно вешать таких две штуки и будет за 20 минут.
Я где-то читал шо у человека на Валкере добавление батареи не добавляло времени полета “из-за тго что увеличивался доп.вес коптера”.
Кстати, у Назы с наземной станции в купе с айпадом (или компом) можно управлять коптером как по аппе. Арду-пилот так работает?
Если бы не было такой наземной станции, я бы наверное не перешел на НАЗУ.
Ну есть же примеры когда наша Валкера летает , а не просто зависает, с по-заводскому настроенной отсечкой по питанию - железно 12 минут! Вон у Романа Валкера летала безустали.
Ну а вообще батареи 2200 однозначно мало. Нужно вешать таких две штуки и будет за 20 минут.
Я вот о том же. Это с моей батарей 2450 он висит 8 минут, но если разгрузить, то еще 1-2 протянет. ХЗ в общем. Может в моторах проблема, кто знает как китаёзы обмотки в них мотают. Если в мотор заглянуть, то обмотка сикось-накось намотана. Кто то говорил что пара моторов из 4 греется.
Я 31 декабря на ХК заказал для Валкеры такие моторы как и Владислав. ХК жудко плохо работает с доставкой, но думаю шо к середине месяца должны прийти. Тогда проверю как оно будет на Валкере с этими моторами и двумя батареями по 2800. Фантик с моим подвесом Тарот Т-2Д + ГоПро и двумя батареями по 2200 летает около 10 минут.
Надо приобрести плату контроллера APM 2.5 или APM 2.6 в пластиковом корпусе с выводами коннекторов вбок (есть варианты с выводами коннекторов вверх, его в корпус уместить не получиться. Около 70-80$.
Арду это открытый проект и платы клепает все кому не лень. Если рассматривать поделки с HK, то цена будет действительно 70-80, а если купить действительно качественную плату, например от 3drobotics, то цена уже буден сопоставима с NAZA V2.
Опционально, при желании иметь наземную станцию, нужен ноутбук или планшет с Андроидом не ниже 4.0. и комплект радиомодемов 3dr. Они бывают на частоту 433мгц и 915мгц.Около 40$.
Опять же, это цены китайских кустарей, а за нормальное качество извольте стольничек выложить.
Кто то скажет, что даже по таким ценам Арду получается прилично дешевле, но что Вы получите за цену Арду? Практически плату контролера и возможность работать с открытым ПО. Если кто то рассчитывает заменить стоковый контроллер в X350 на Арду, и полететь имея все крутые возможности этого контролера, и при этом сделав несколько кликов мышкой в компьютерном ассистенте, то могу огорчить. Мало того, что да же имея, качественную плату от приличного производителя, придется посидеть не один день, а возможно месяцы изучая форумы, так еще бороться с глюками плат китайских кустарей, если вдруг решит совсем уж сэкономить и купить дешевый вариант. А учитывая, что как правило владельцы Валкер, далеко не продвинутые моделисты, то и шансов на то, что Арду у них никогда нормально не полетит, достаточно много. Конечно у Ардо возможности огромные, вот только доступны они далеко не всем.
Для полноты вопроса выложи настройки свои для ардупилота и будет у людей “главная фишка валкеры - простота”. Те закрепил платку, все соединил, закинул настройки и получил большие плюсы к стандарту.
Вот этого как раз с Арду, сделать не получится. Хотя и есть какие то настройки выложенные для общего обозрения, но все они сугубо индивидуальны, и наверное главная фишка Арду и заключается в том, что каждый должен сотворить свои настройки. И кстати все владеют языком программирования С++? Если нет, то нацелившись на Арду, придется еще и язык программирования изучить, он понадобится для создания своих настроек.
А теперь рассмотри, так здесь ненавистную NAZA и Ко. Конечно аналогичный комплект от DJI обойдется дороже, примерно 600 баксов, то-есть разница 200-250$. C одной стороны деньги вроде приличные, но с если учитывать Plug-n-Play специфику продукции от DJI, то бишь подключил и полетел, то эти несчастные 6000-7000 рублей окупаются с лихвой сэкономленным временем, нервами, и в конце концов удовольствием от того, что пока твои товарищи сидят на компьютерных курсах, и ночно и дневно курят бесконечные форумы, общаясь с “настоящими” профи, ты просто летаешь в свое удовольствие.
А теперь вернемся к тому, что же ближе к X350, Арду или NAZA?
Обсуждение ардупилота именно с этим аппаратом - это в тему.
X350 это RTF решение и люди покупая его, видимо рассчитывали полететь с наименьшим вложением мозгов и времени, при этом стараться изо всех сил отвергать родственную систему, и пытаться взять за альтернативу Арду, который по большому счету является даже не полетным контроллером, а системой автопилота, причем совсем не обязательно Квадрика или Самолета, на Арду строят все, что нуждается в автономной работе. Это как в том анекдоте, когда Чел пзднул в автобусе, и его за это выставили, а сами поехали дальше, говном дышать.
Вот и я спрашиваю, где логика? 😃
Я 31 декабря на ХК заказал для Валкеры такие моторы как и Владислав. ХК жудко плохо работает с доставкой, но думаю шо к середине месяца должны прийти. Тогда проверю как оно будет на Валкере с этими моторами и двумя батареями по 2800. Фантик с моим подвесом Тарот Т-2Д + ГоПро и двумя батареями по 2200 летает около 10 минут.
10 минут на 4400mAh??? Кто то тут байки травил что фантик с 5хххмАн мин 20 летает…