Cheerson CX-20 клон квадрокоптера DJI Phantom

Господа новаводы и чирзонисты - никто не менял (вдруг) подшипники на движках??? Интересует размер подшипников, а то после года эксплуатации залюфтили. Менять просто, нужно найти и желательно поближе)))
Вот прямо не знаю что заказывать. Вот вы оба используете, вы лично, что порекомендовали бы в качестве первого подвеса?
Камера у меня уже есть - SJ4000. Пластиковый Walkera, действительно, очень хрупок? С Eachine китайцем CX-20 действительно так уж плохо летает, как тут в теме писали?
Как бывший владелец Eachine и нястоящий G-2D я бы посоветовал все же не экономить, а брать G-2D.
Точнее сформулирую так:
Если нужен просто подвес для камеры типа Gopro и SJ4000, нормально работающий (для 2-х осевого подвеса) из коробки, а также крепящийся и подключающийся к чирику без колхоза, то только G-2D (опять же минус 40гр.).
Плюс же Eachine только в возможности более тонкой настройки через свое ПО, но для этого нужны прямые руки 😉 и возможности повесить на него тот же мобиус или что еще душа пожелает 😃. Но летает с ним аппарат реально хуже по моим наблюдениям.
Снял небольшое видео:
о работе подвеса Walkera G-2D, может кому-то поможет определиться с выбором 😉.
Сорри за качество, снимал на мобилу.
Запостил в дневнике подробный гайд по экранированию GPS и перемещению его под купол - rcopen.com/blogs/70139/20473
Мб кому-то будет интересно.

Купил я подвес облегченный , но вот почему то он не выполняет своей функции , дергается . Где то я читал здесь , что у кого то тоже такая проблема была , но не помню где именно читал !)) подскажите , может кто сталкивался )
Купил я подвес облегченный , но вот почему то он не выполняет своей функции , дергается .
Камеру вешали, когда проверяли?
Если речь о Eachine подвесе, то попробуйте такие настройки (предварительно запомнив свои!):

Подбирались под вес sj4000, на идеальность не претендую, но дерганья должны исчезнуть.
Ну и сразу можно поправить максимальные углы, для плавного управления камерой с пульта:

PS Камеру нужно повесить так, что бы на не подключенном подвесе она висела ровно.
Запостил в дневнике подробный гайд по экранированию GPS и перемещению его под купол
Видел несколько видео/фото, нигде проводок не клали и массу не подключали, просто фольга и все.
Возможно я не обращал внимания на провод… но помойму работает и без него…
Лучше с ним или нет… нужен следственный эксперимент 😃
Как писал ранее, я спалил GPS модуль, написал китайским братьям, они просили снять видео с неработающим модулем, снял, отправил, на следующий день они выслали бесплатно новый. Посылка пришла через 9 дней (сегодня), открываю пакет, а там два модуля скреплены скотчем, что за фигня? Ранее у меня был модуль нового образца
Сфоткайте кто-нибудь свой, у Вас тоже сэндвич и как подключен к нему разъему, на модуле 6 пинов, а на разъеме 4.
Модуль немного не тот, но распиновка должна быть стандартная.

Купил я подвес облегченный , но вот почему то он не выполняет своей функции , дергается .
ПоЛзуйтесь соответствующими ветками - там всЁ .
rcopen.com/forum/f107/topic391523
[QUOTE=immy;5784965]Камеру вешали, когда проверяли?
Если речь о Eachine подвесе, то попробуйте такие настройки (предварительно запомнив свои!):
А с помощью какой программы ?
Камеру вешали, когда проверяли?
Если речь о Eachine подвесе, то попробуйте такие настройки (предварительно запомнив свои!):
Подбирались под вес sj4000, на идеальность не претендую, но дерганья должны исчезнуть.Ну и сразу можно поправить максимальные углы, для плавного управления камерой с пульта:
PS Камеру нужно повесить так, что бы на не подключенном подвесе она висела ровно.
Когда проверял , камеру не весил ) камера sj5000+
Когда проверял , камеру не весил ) камера sj5000+
Подвесы проверяют только с полезной нагрузкой. В остальном gosha57 прав, вам сюда rcopen.com/forum/f107/topic391523
Подскажите, что могло случиться с ард
укоптером, что перестали нормально работать gps режимы? Спутников хватает, hdop меньше 2, координаты в МП отображаются верно. При попытке завесить в loiter коптер наклоняется и шустро пытается куда-то свалить. В стабилизации ведёт себя нормально.
пытается куда-то свалить.
Было такое после калибровки компаса на новом месте 50 км от прежнего. Посадил с миникрашем в траву, перекалибровал. Дальше нормально…
Как писал ранее, я спалил GPS модуль, написал китайским братьям, они просили снять видео с неработающим модулем, снял, отправил, на следующий день они выслали бесплатно новый. Посылка пришла через 9 дней (сегодня), открываю пакет, а там два модуля скреплены скотчем, что за фигня? Ранее у меня был модуль нового образца
Какие 2 модуля?
Это обычный бистаровский модуль, который стоит на 99% коптеров.
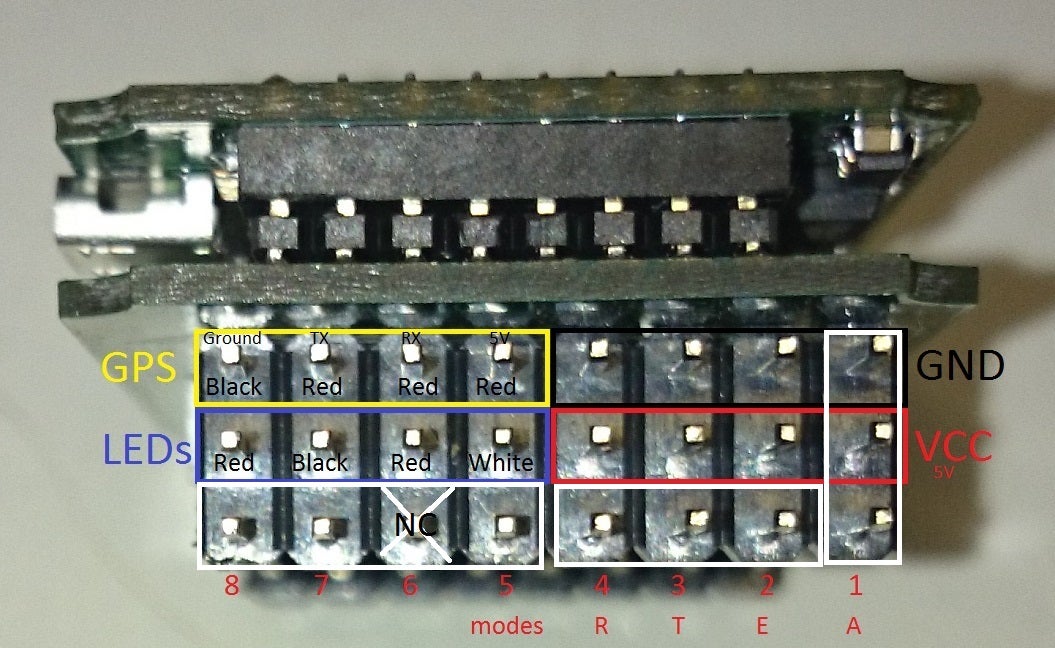
Распиновка у него написана на самом разъеме, точнее над разъемом.
1 и 6 пин не используются, 2 - земля, 3 - TX, 4 - RX, 5 - +5В
Вот фото подключения:

Какие 2 модуля?
В прозрачной термоусадке два модуля. По крайней мере так выглядит!
Первый квадрат это модуль в который вставлен разъем. Над ним другой квадрат, от него идет черный проводок от первого.
Антенна?
В прозрачной термоусадке два модуля. По крайней мере так выглядит!
Ну да, 2 платы. На одной модуль, разъем и прочее навесное, на второй антенна.
Если не ошибаюсь, выглядит это как-то так.
На фото другой модуль, но с такой же компоновкой.


Отлетал несколько раз на улице. Потестил полетные режимы.
Режим возврата на посадку работает достаточно прилично - смещение не более пары метров вроде.
Но в режиме удержания позиции или в режиме удержания высоты - никаких действий коптера по стабилизации не увидел.
Особено по газу. Сдвигаешь стик на щелчок вверх от средней позиции - коптер пошел шустро набирать высоту. Свигаю на щелчок вниз - так же шустро падает.
В МП проверил включаются ли эти режимы на коптере при включении их на пульте - вроде всё нормально.
Делал калибровку акселерометров в МП. ТАкже делаю калибровку компаса каждый раз.
Определил влияние помех от силовых линий на показания компаса процедурой compassmot - показал 5% всего
Куда смотреть?
Но в режиме удержания позиции
Вы, видимо, имеете в виду режим Loiter, это не режим удержания позиции, вольно можно перевести как “слоняться”, т.е. вальяжно летать, прощая ошибки и более-менее держать положение. Здесь, как и в режиме удержания высоты, все управление доступно, только более вялое. Режим удержания позиции это Position Hold, его можно назначить через Mission Planner. Проверьте, чтобы GPS модуль не прикрыт был проводами. Как-то так.
Вы, видимо, имеете в виду режим Loiter, это не режим удержания позиции, вольно можно перевести как “слоняться”, т.е. вальяжно летать, прощая ошибки и более-менее держать положение. Здесь, как и в режиме удержания высоты, все управление доступно, только более вялое. Режим удержания позиции это Position Hold, его можно назначить через Mission Planner. Проверьте, чтобы GPS модуль не прикрыт был проводами. Как-то так.
Садится же он нормально вроде. Значит наверно не в GPS проблема?
Да…режим Loiter.
А что сделать чтобы он высоту в любом из режимов устойчевее держал?
А то всё внимание при управлении уходит на попытки эту самую высоту удержать. Один раз попутал стики и квадрик метров на 150 улетел в частном секторе, до теста режима посадки. Кое-как посадил вручную трясущимиси руками - думал капут ему уже))
Смотрите в логах графики NSATS (количество спутников) и HDOP (точность позиционирования), если скачут, количество падает ниже 7-6 и качество выше 3, значит плохие условия приема, в любом случае нужно ждать чуть дольше после загорания зеленого светодиода перед взлетом, изолировать GPS модуль, калибровать компас в новом месте полета вдали от железа и ЛЭП, для пущей верности залить дефолтные параметры, поменьше играть с настройками. И мой добрый совет, купите телеметрию и не летайте в частном секторе. Уж лучше пусть интерес к полетам пропадет, чем добрый сосед челюсть сломает 😃