Walkera QR-X350 Pro

может я что-то не то делал…
…а думал что калибрую (
Еще раз поменял движок+регуль. Полетела злодейка.
Но процесс калибровки все равно не понятен.
а может его там просто нет?
Народ, кто то пробовал PosHold Режим? Считаю, что тоже достаточно интересная штука при контроле 3D FIX. Смущает только то, что МП не отображает вкл. этого режима и умная баба не проговаривает. Так же нет настроек для этого режима в FULL PARAM. , таких как PHLD_BRAKE_ANGLE и
PHLD_BRAKE_RATE.
а может его там просто нет?
Я ж давал сцылу на буржуев. Вроде бы есть.
Да. Сравнивая ваши и свои параметры, обнаружил у себя такую фигню:
RC3_TRIM 1716 . мне кажется, или он должен быть в районе 1000?
Я ж давал сцылу на буржуев. Вроде бы есть.
Да. Сравнивая ваши и свои параметры, обнаружил у себя такую фигню:
RC3_TRIM 1716 . мне кажется, или он должен быть в районе 1000?
У меня:RC3_TRIM,1008
У меня:RC3_TRIM,1008
И я про то, другой вопрос- на что это влияет?
Дальше информация может быть не объективной.
Как я понял это канал газа. Залез в МП. Низ по этому каналу 1000, верх соответственно 2000,
И чего? На что влияет эта переменная?
Да попробовал (не проверил- не облетал) по Вашему совету воткнуть PosHold Режим
Отображается все в настройках. У меня DEVO 10 перестроенная в “шести режимную”
Еще во время ремонта аппарата воткнул пищалку. По идее должна врубаться, когда нет сигнала от пульта.
Вся фигня в том, что она питается от 5-ти вольт, и при подключении Walkera только через USB - пищит в ухо
В общем пищалку надо только с выключателем. А то дома достанет
Да попробовал (не проверил- не облетал) по Вашему совету воткнуть PosHold Режим
Короче нету этого режима. Только с поля приехал. Этот режим на прохе не работает. А жаль… Был бы покруче Althold.
Короче нету этого режима. Только с поля приехал. Этот режим на прохе не работает. А жаль… Был бы покруче Althold.
“нету”, извините, Это “есть -но не работает”, или “не включается”?
================================================================
И еще один момент - как проверить двигатель и регулятор?
Не устанавливая в аппарат. ШИМ- ЭТо генератор, по видимому можно софтовым под виндами.
Даем 12 Вольт, и на вход - генератор. Не?
Или подскажите где глянуть.
После ремонта остались 2 движка и один регуль. Ломать коптер для проверки -не хочу. И так больше недели на ж… земле сидел.
Трока проводов нужна только для запитывания приемника. Для остальных каналов можно спокойно пользоваться только сигнальным проводом.
А где собсно можно узнать, какой из трех пинов сигнальный?
А где собсно можно узнать, какой из трех пинов сигнальный?
Мультиметром проверить никак нельзя?
попробую угадать - черный масса. Красный -плюс, Белый сигнал. (Я не помню схему). Там скорее не трехпроводная, а двухпроводная схема.
Полетал сегодня по миссиям в DP со свежеустановленном 3DR. Потерь связи не замечено. На расстоянии в 500 метров канал процентов 80. По умолчанию в DP высота для точки 20 метров. Надо менять вручную на повыше, чтобы не зацепить деревьев.
зы: и все же стиками компас отвратно калибруется. За 30 сек успевал повернуть и по шести координатам, но грустно. А через МП никаких проблем.
А где собсно можно узнать, какой из трех пинов сигнальный?
Тот, что верхний, ближе к верхней крышке-сигнал, средний плюс, нижний-минус.
“нету”, извините, Это “есть -но не работает”, или “не включается”?
================================================================И еще один момент - как проверить двигатель и регулятор?
Не устанавливая в аппарат. ШИМ- ЭТо генератор, по видимому можно софтовым под виндами.
Даем 12 Вольт, и на вход - генератор. Не?
Или подскажите где глянуть.
После ремонта остались 2 движка и один регуль. Ломать коптер для проверки -не хочу. И так больше недели на ж… земле сидел.
Уважаемый, Вы потерялись???
Перепаял и я резисторы на Devo-M, один SMD-й нашелся в старом CD-rom, второй на материнке.
Вот как оно встало:




Закрепил радиомодем спереди гайкой перпендикулярно гнутой плоскости корпуса, встало очень хорошо. Единственный нюанс - пришлось спилить угол модема где то на 1 см на наждаке, так как он мешал легкой установке. Плата двухслойная - в том месте нет дорожек, модем работает).
Теперь Walkera выглядит вот так:

Вес с аккумом 5200mAh, 2-х осевым подвесом на базе EvvGC, камерой GoPro с поляризационным фильтром и АКБ, 3DR radio и передатчиком 5.8Ghz 200mW с усовершенствованной антенной получился ровно 1200гр.

Для экономии веса были перепаяны большие капли свинцового припоя силовых проводов, многие провода заменены и укорочены.
Вопрос по 3DR радио - обязательно ли обновлять прошивку, или если все летает из коробки - пусть летает (какие преимущества и что именно при этом нужно настроить программно в модеме)?
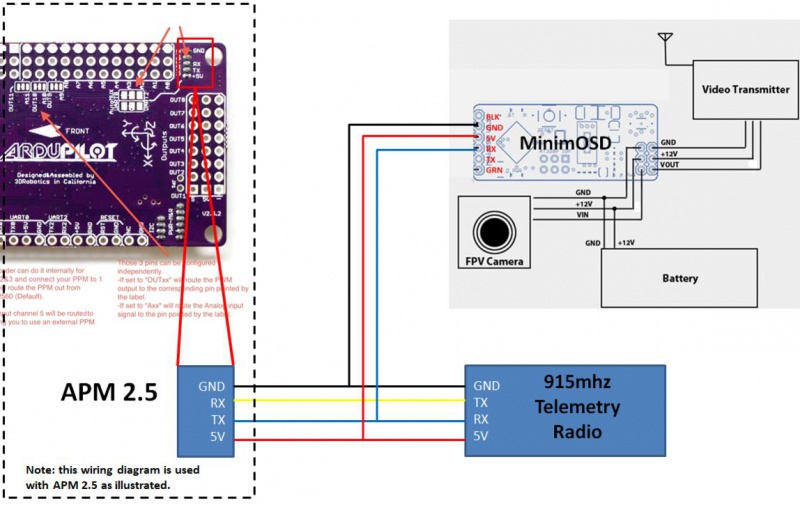
В 100500й раз для себя и новичков хочу уточнить, вот эта схема НЕ является правильной?
Картинка взята из Wiki
Тут TX подключен к TX"ам, RX к RX"ам.
Насколько могу догадываться T - трансмит, R - ресив.
Именно поэтому на OSD нам нужен только прием данных от контроллера, а на 3D - и получение и отправка данных.
В 100500й раз для себя и новичков хочу уточнить, вот эта схема НЕ является правильной?
Картинка взята из Wiki
Тут TX подключен к TX"ам, RX к RX"ам.
Насколько могу догадываться T - трансмит, R - ресив.
Именно поэтому на OSD нам нужен только прием данных от контроллера, а на 3D - и получение и отправка данных.
Схема правильная, вплоть до цветов проводов от радиомодема.
Т.е. неправильная вот эта, взятая с той же страницы
Тут вопрос религии. На штатив можно закрепить планшетник и через него всю телеметрию смотреть и миссии планировать по 3DR, верно. Но если шлем, то без OSD никак. И с чего бы ей греться. Там деталей всего ничего. Может разные платы и комплектующие и взять подороже…?
Греется еще как. Вообще интересная вещь получается. Передатчик, который по своей сути должен греться, греется в приделах нормы, а приёмник,который греться не должен, греется как печка.
Появилась одна интересная проблемма. После долгого не использования не совсем адекватно стал вести себя родной валькеровский подвес. При небольших вибрациях подвес стал сбиваться (сьезжает). К
Настраивать его по новой не очень хочется, гемор ещё тот походу… Ни кто не лечил подобное?
Я снова с Вами (в воздухе) -облетал аппарат после ремонта. Спасибо Всем, кто на мои порой глупые вопросы, дает умные ответы.
Фотография светодиодных “фар” в полете
Да светодиоды на аппарате видно примерно на расстоянии до 100м. днем, а две штуки позволяют оценить положение более точно.
Еще момент - ранее плата MinimOSD, была установлена параллельно контроллеру DEVO, , боком, со стороны разъема GPS приемника. В процессе полета - спутники иногда терялись. К чему это может привести - всем понятно.
На текущий момент плата OSD установлена “на носу” аппарата", так же на торце. Сегодняшний полет не выявил сбоев приема GPS в полете. Кул.
Вопрос к тем, кто летает с камерой iLOOK. Не могу установить дату/ время (хотя бы это) - может быть кто либо знает как это делается?
А анатацию к картинке слабо прочесть? Где вы там увидели, что речь идет о devo-m?
Спасибо за язвительный ответ, совсем не слабо, все перечитываю по несколько раз. Но в той же Вики написано
В отдельной статье рассмотрены тонкости настройки и вопросы по расширению возможностей полётного контроллера DEVO-M, используя всю мощь ArduPilot, которым он и является.
Спасибо за язвительный ответ, совсем не слабо, все перечитываю по несколько раз. Но в той же Вики написано
Ну так всё правильно написано. Только в одном случае подключение к плате devo в другом к АРМ. Улавливаете разницу? Это как к примеру самсунг гэлакси и НТС 660. И то и то работает на андроиде , имея даже какие то одинаковые компоненты и может схемотехнику, но аппараты разные. (назвния аппаратов от фонаря, придираться не надо 😃 )
Греется еще как. Вообще интересная вещь получается. Передатчик, который по своей сути должен греться, греется в приделах нормы, а приёмник,который греться не должен, греется как печка.
Посмотрел я видео от Юлиана про настройку OSD. И краш там такой не запланированный со смертельным исходом хозяев неба…
Так он буквально говорит, что 5.1V для OSD гарантированная смерть. Поскольку стабилизатор в прошке на букву Х, есть подозрение, что греется OSD из-за повышенного питания. Пока сам не поставил точно сказать не могу, но мысли вслух они такие. И стабилизатор, кстати, у него правильный, по феншую. Надо бы такой. Может все чуднЫе проблемы пропадут.
Посмотрел я видео от Юлиана про настройку OSD. И краш там такой не запланированный со смертельным исходом хозяев неба…
Так он буквально говорит, что 5.1V для OSD гарантированная смерть. Поскольку стабилизатор в прошке на букву Х, есть подозрение, что греется OSD из-за повышенного питания. Пока сам не поставил точно сказать не могу, но мысли вслух они такие. И стабилизатор, кстати, у него правильный, по феншую. Надо бы такой. Может все чуднЫе проблемы пропадут.
Да подключайте OSD и не парьтесь. Всё там у нас нормально с напряжением. Греться сильно он будет по любому. Версии 1.0 вообще сгорали нафиг. А 1.1 уже живучие. 😃 Нет, серьёзно, ставьте всё будет хокей. Главное не мутить с 12 вольтами. У меня Ilook, так вообще заморочек нет. И через аналоговую и через цифровую идёт питание 5V и все работает. Вернее работало… 😦
Ну вроде настроил подвес, как Владислав писал. Посмотрим в полёте как будет себя вести. Так что задавайте вопросы! 😃 заодно проверю режим SPORT.