Flying 3D X8 6 Axis 2.4G 8CH GPS FPV RC Quadcopter RTF

у меня подключен так:
com на мозге идет на rx приемника
сн4 мозгов идет на сн1 приемника и потому мне думается, что можно произвольные каналы соединить и этот конектор нужен только для подачи питания на приемник.
com на мозге идет на rx приемника
сн4 мозгов идет на сн1
во! то что нужно
премного благодарен!
кто знает, зачем нужны резьбовые втулки на ногах рядом с винтами крепления оных к корпусу?
второй вопрос х8 светодиоды. лучевые и главный. расшифровка морганий. что означают. думаю для всех будет полезно.
про эти корпуса кто-нибудь в курсе?
banggood.com/…/Diatone-White-Sheep-PCB-Version-FPV…
banggood.com/…/HJ-MWC-X-Mode-Alien-Multicopter-Qua…
❗Беда!!!❗
😈Прошился до кирпича 😈
подключил и нажал апдейт. коптер программно отключился и все. после перезапуска питания просто издает унылое и монотонное бип с интервалом в 2 сек.
❗ЧТО ДЕЛАТЬ!!! ❗
P.S.: я в курсе, что я алень 😇
Доброго времени суток! Вот и у моего коптера снесло башню. Отправил его с камерой подальше, по приборам метров 800. Ну и чтобы не заморачиваться, включил автовозврат… После этого квадр полетел не ко мне, а в Китай… и с довольно большой скоростью. Перевод в ручной режим толку не дал, как и включение удержания позиции. Птичка стремительно удалялась. Да и ветер помог. Через какое-то время управление удалось вернуть, но на таком расстоянии понять что- то не возможно. Да и я разнервничался, побежал, или скорее поскакал в ту сторону где он находился. затем его потерял из виду. Нашёл его, после того как забил координаты с пульта в навигатор. По нему расстояние было 960 метров до коптера, по пульту-1080м. Коптер зацепил лапой землю и упал. Естественно корпус повреждён, и один двигатель сильно греется. Голыми руками держать невозможно. Камера не известно, работает или нет. Коннектор вырвало и аналога ему пока нет. Да и улетела она метров на 5.
Сейчас думаю, что вернуть коптер можно было используя данные о положении его в пространстве с пульта. Но тогда это так стремительно всё произошло, что соображать начал после краша. Понять причины не могу. Несколько раз взлетал с этого места. Автовозврат работал. Компас откалибровал. спутников было 9-10. Но вот что то долго они ловились. Когда для поисков включил навигатор, местоположение определил быстро, значит сигнал был хороший. Кстати, координаты свои передаёт довольно точно. Вышел прямо на него. А вот с дальностью немного привирает. В чём может быть причина?
У меня Х6, и все, что здесь написано, до боли знакомо. Периодически средь ясного неба и при наличии достаточного количества спутников, птичка вдруг начинает жить своей жизнью и пытается уйти в свободный полет. Хотелось бы от асов пилотажа услышать советы по алгоритму действий при таком неуправляемом поведении коптера. Мне кажется, что в первую очередь надо попытаться поднять птичку повыше, чтобы было лучше видно направление ее полета (удаление или приближение к пилоту). Интересно узнать, кто как поступает в таких нештатных ситуациях?
Вот и у моего коптера снесло башню
Вот меня постоянно смущает это окно
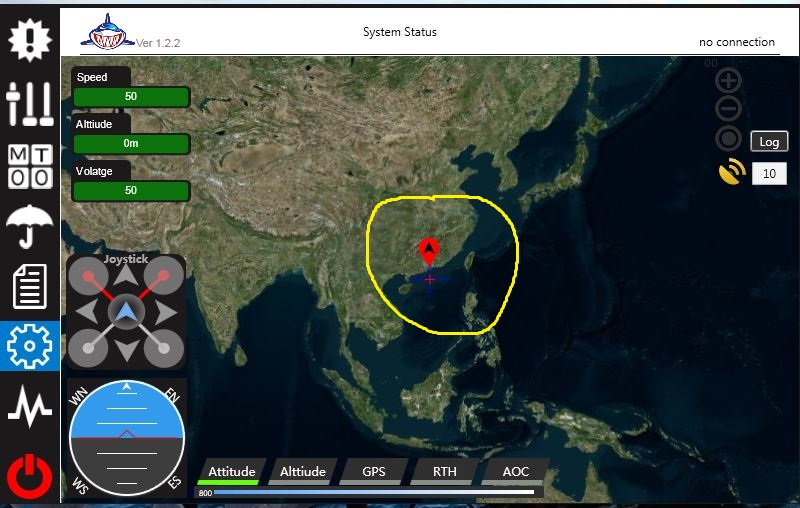
и я думаю, туда он и стремится, судя по поведению, когда у моего башню сорвало
Доброго времени суток! Вот и у моего коптера снесло башню. Отправил его с камерой подальше, по приборам метров 800. Ну и чтобы не заморачиваться, включил автовозврат… После этого квадр полетел не ко мне, а в Китай… и с довольно большой скоростью. Перевод в ручной режим толку не дал, как и включение удержания позиции. Птичка стремительно удалялась. Да и ветер помог. Через какое-то время управление удалось вернуть, но на таком расстоянии понять что- то не возможно. Да и я разнервничался, побежал, или скорее поскакал в ту сторону где он находился. затем его потерял из виду. Нашёл его, после того как забил координаты с пульта в навигатор. По нему расстояние было 960 метров до коптера, по пульту-1080м. Коптер зацепил лапой землю и упал. Естественно корпус повреждён, и один двигатель сильно греется. Голыми руками держать невозможно. Камера не известно, работает или нет. Коннектор вырвало и аналога ему пока нет. Да и улетела она метров на 5.
Сейчас думаю, что вернуть коптер можно было используя данные о положении его в пространстве с пульта. Но тогда это так стремительно всё произошло, что соображать начал после краша. Понять причины не могу. Несколько раз взлетал с этого места. Автовозврат работал. Компас откалибровал. спутников было 9-10. Но вот что то долго они ловились. Когда для поисков включил навигатор, местоположение определил быстро, значит сигнал был хороший. Кстати, координаты свои передаёт довольно точно. Вышел прямо на него. А вот с дальностью немного привирает. В чём может быть причина?
Вопрос: Вы винты балансировали? Мне это для поиска проблем нужно знать…
На счет возврата. Я часто использую функцию “контроль курса” - это когда коптер, независимо от направления кабины (носа) управляется направлениями хода стика. Т.е. если стик направления дернуть “на себя” - коптер полетит к вам, не смотря на то, что будет развернут боком к вам…

У меня есть предположение, что на мозг коптера оказывает влияние вибрация. Я проводил испытания с подвесом и постоянно коптер уносило… Я облегчил подвес на 60 гр. и отбалансировал винты… Проблема вроде бы исчезла. На Хабсане погнуд вал одного движка… Аналогичная беда - летит в сторону и не треммируется… Возможно от вибрации глючит гироском, я не уверен - это только предположение, тем более, учитывая, что мозги жестко (без вибропоглащения) крепятся к корпусу. как я сообщал ранее, проблема глюков у меня была при наличии подвеса, без него- все ОК. Я запускал с отключенным подвесом - коптер глючил через 2-3 минуты полета. Я купил облегченный подвес и тчательно отбалансировал винты - испытания прошли успешно. Я так думаю, что дополнительная нагрузка в виде подвеса добавляет вибрации на мозги и что-то начинает сбоить. Ну а что там может сбоить? Во первых - гироскоп. начал изучать работу гиро…
а кто знает как балансировать самозатягивающиеся пропы?
а кто знает как балансировать самозатягивающиеся пропы?
Карандаш потоньше воткни вместо вала двигателя…
Я запускал с отключенным подвесом - коптер глючил через 2-3 минуты полета.
Получается, что он “терпит” 2-3 минуты, а потом ему это надоедает? Как-то странно все это…
Карандаш потоньше воткни вместо вала двигателя…
У меня гравицапа… С карандашом результат мне кажется сомнительным … 😃
второй вопрос х8 светодиоды. лучевые и главный. расшифровка морганий. что означают. думаю для всех будет полезно.
про эти корпуса кто-нибудь в курсе?
Вроде на rcgroups в теме про Х6 нашел расшифровку моргания главного светодиода, должно совпасть с нашим Х8. А светодиоды на лучах просто цветные разноцветные для красоты, поправьте, если не так.
Я так думаю, что дополнительная нагрузка в виде подвеса добавляет вибрации на мозги и что-то начинает сбоить.
У меня подвес еще и сам вибрирует немного…
У меня подвес еще и сам вибрирует немного…
А вот это лечится…
Вроде на rcgroups в теме про Х6 нашел расшифровку моргания главного светодиода, должно совпасть с нашим Х8. А светодиоды на лучах просто цветные разноцветные для красоты, поправьте, если не так.
спасибо! теперь хоть в общих чертах ясно что ему нужно…вот еще бы контроллер восстановить 😦
что до диодов на лучах, то, судя по тому, что расшифровки их цветового кода нет в инструкции, то это действительно просто бортовые огни.
Давайте поставим точки над и… Путаница в умах. Поправьте если не прав. Flying 3d выпускает квадрики X6 и X8. У них мозги BigFlyShark соответственно X6 и X8. На сайте производителя мозга про X6 ни слова. Вся информация про мозг X8. Там же все мануалы и софт. В них ответы на все вопросы, про мигание светодиодов и т. д. На том же RCGROUP ссылка туда. Не все, похоже, в курсе. Для меня лично не очень ясно, делают ли сейчас мозг X6, т. к. на сайте все про X8. Может сейчас на flying X6 мозг X8 ставят? В чем отличия мозгов? Assistant работает на flying X6? Прошивки судя по сайту для x6, x8, cheerson разные, но я заливал прошивку 148 которая обозначена для X6 через assistant на X8 и все ок, т.е. получается что прошивка X6 и X8 одна, или ассистент должен как-то разбираться… Здесь для меня непонятки … Похоже все эти вопросы надо как-то в голову темы выносить…
спасибо! теперь хоть в общих чертах ясно что ему нужно…вот еще бы контроллер восстановить 😦
что до диодов на лучах, то, судя по тому, что расшифровки их цветового кода нет в инструкции, то это действительно просто бортовые огни.
В лучах стоят RGB светодиоды с встроенными генераторами переключения. К ним идет только “+” и “-” т.е. ни каких управляющих сигналов там нет. Элементарная иллюминация как на ёлке…
Элементарная иллюминация как на ёлке
Действительно, только питание подается… Как это я сам не допер … 😦 Мозг затуманили хвостовым диодом, который обо всем на свете говорит… 😃
и всеже, господа!!!
как поднять контроллер после неудачной прошивки!!!
и всеже, господа!!!
как поднять контроллер после неудачной прошивки!!!
Миша, для таких советов пока мало исходных данных… Какая прошивка у вас была рабочей? Какой версией ассистента прошивались? Попробуйте написать в саппорт: BIGFLYSHARK@live.com
О несовместимости старых контроллеров с новыми прошивками я где-то читал, и вроде как-то реанимировали… но не могу вспомнить где - наверно у буржуев…
Миша, для таких советов пока мало исходных данных… Какая прошивка у вас была рабочей? Какой версией ассистента прошивались? Попробуйте написать в саппорт: BIGFLYSHARK@live.com
О несовместимости старых контроллеров с новыми прошивками я где-то читал, и вроде как-то реанимировали… но не могу вспомнить где - наверно у буржуев…
Миша, для таких советов пока мало исходных данных… Какая прошивка у вас была рабочей? Какой версией ассистента прошивались?
Паша, единственное, что помню-Hardware 15,10 это точно. Firmware не помню 😦
В Assistant в левом верхнем углу стоит Ver 1.4 хотя качал я с сайта 1.3 версию
Внешний вид контроллера - копия Naza. Без карты и с корпусом.
Как говорил Иван Васильевич “да ет ладно…”
Вопрос решился сам собой 😃
скачал с сайта Bigshark offline update программку для cheerson cx20 версии 148.
вся фишка в том, что под win xp она не работает, а в win7 ок и в ней инструкция.
перед этим по аналогии с прошивкой Naza я оставил только конектор USB и Power, а остальные отключил.
программа прошивки просит сначала подключить мозг к компу, а потом подать питание.
жму update и вуаля! процесс проходит на ура. все отключаем.
вкл питание борта и подключаю к assistant.
Device:shark x6
Firmware:149
Hardware:10,11
жмакнул таки update ,упрямый баран-не удержался таки 😃))
на x8 обратно не прошила. 😦 зато понял в чем я допустил косяк и все похерил.
Assistant при обновлении выдает полоску прогресса операции. примерно на 20 процентах винда выдает сигнал отстыковки USB устройства, а через секунд 5 снова сигнал подключения и индикатор прогресса успешно доходит до конца и система просит все перевключить.
вот тут то моя реакция меняя и подвела…решив что “Хьюстон, у нас проблемы” я сам перевключил питание борта.
Assistant и выдал ошибку и каюк… что было дальше описано выше 😃 я алень… и теперь у меня x6 😦 но по assistant все функции остались прежними. коптер запускается и на все реагирует…так то… написал в саппорт выслать прошивку от x8.