Flying 3D X8 6 Axis 2.4G 8CH GPS FPV RC Quadcopter RTF

Как правило это компас. Калибруйте на улице, подальше от железок, силовых кабелей, РЛС и пр.
Перед каждым вылетом калибровка стика газа и компаса. Кругами летал на озере (на льду), метрах в трехстах от жилых кварталов.
Может быть там чего на дне ))
Это происходит только в автоматических режимах кажется. Поэтому, если начал садиться, то можно перейти в ручной и дотянуть аппарат до приемлемого места посадки.
Еще не летал, не знаю. Все-таки возможно это сделать в ручном режиме? Летчики, отзовитесь.
Ural, Игорь, у Вас сегодня тоже солнышко должно быть, мы рядом (всего сто км по трассе). Можно пробовать ))
В ручном: летим, автомат: садимся.
Перед каждым вылетом калибровка стика газа и компаса. Кругами летал на озере
Хм…странно все это. Может компас криво стоит? Или наводки от силовых проводов.
Кстати, вроде все перечитал, но все-равно получил небольшой краш.
Оказывается когда летишь на большой скорости в ручном режиме и включаешь GPS режим, коптер делает элегантный кувырок с падением на землю.
(хорошо что летал без обвеса и над мягкой землей).
Хм…странно все это. Может компас криво стоит? Или наводки от силовых проводов.
Возможно действительно был перекос.
Уже переделал ту конструкцию.
Провода все далеко развел.
Оказывается когда летишь на большой скорости в ручном режиме и включаешь GPS режим, коптер делает элегантный кувырок с падением на землю.
Спасибо, будем аккуратнее.
Краем глаза следить за показаниями телеметрии и при приближении к критическому уровню лететь домой.
Ага… Один раз баловался, тупо гонял коптер над землей, и заметил что он автоматом сел когда было 10,5 вольт.
Вчера глянул на пульт - вижу 10.6, сразу пошел на посадку. В итоге в полете всего 8 минут… Маловато как-то. поэтому и говорю что не нравится мне ситуация с питанием. Бывало точно больше 10 минут летал, еще ни разу не дожидался автоматической посадки, при этом бывало минут 10-12 общего времени. А потом ставлю на зарядку, и в аккум вливается чуть больше 1к ампер. Т.е. там еще летать и летать.
Поэтому, если начал садиться, то можно перейти в ручной и дотянуть аппарат до приемлемого места посадки.
Последние две попытки сесть в ручном режиме закончились неудачно, вторая из который - оторваная защелка “крышки багажника” причем при посадке на мягкий песок.
Согласен что точно рассчитать время безопасного полёта сложно. Есть сильная зависимость от стиля летания и, например, ветра, на борьбу с которым так же расходуется энергия.
От себя добавлю для статистики. В эти выходные летал в неспешном режиме при ветре 3м/с получилось 11-12 минут до автопосадки на стандартных аккумуляторах.
Последние две попытки сесть в ручном режиме закончились неудачно, вторая из который - оторваная защелка “крышки багажника”
Сочувствую. Сам пока это упражнение не пробовал. Попробую при следующем вылете.
Оказывается когда летишь на большой скорости в ручном режиме и включаешь GPS режим, коптер делает элегантный кувырок с падением на землю.
На большой скорости-большие обороты. При переходе на GPS обороты падают, происходит торможение моторами, но коптер по инерции пытается сохранить скорость и происходит кувырок. Надо снижать обороты перед переходом в режим GPS.
На большой скорости-большие обороты. При переходе на GPS обороты падают, происходит торможение моторами, но коптер по инерции пытается сохранить скорость и происходит кувырок. Надо снижать обороты перед переходом в режим GPS.
Это я уже понял, но как новичок - такого в инструкциях нигде не встречал.
Про калибровки, батарею, не летать возле мощных передатчиков, не летать при сильном ветре и т.п. есть, а такого не написано 😃
Это я уже понял, но как новичок - такого в инструкциях нигде не встречал.
Про калибровки, батарею, не летать возле мощных передатчиков, не летать при сильном ветре и т.п. есть, а такого не написано 😃
Хуже инструкции, чем на наши коптеры, я еще не видел. Там многого нет и приходится догадываться. То, что я написал о торможении и даже полной остановке перед переходом из режима быстрого полета в режим GPS, является моей догадкой. Сам я еще не пробовал,но почему то уверен в этом. Если я не прав, пусть “старшие” товарищи меня поправят.
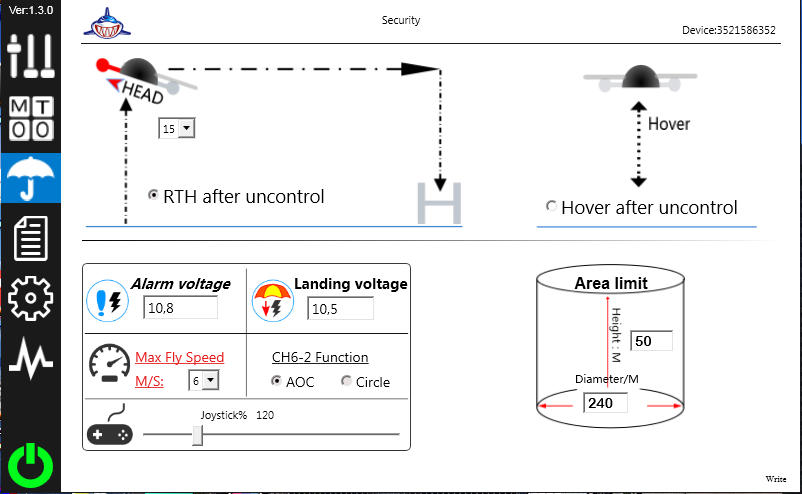
Вячеслав, назрел очередной вопрос, который не дает покоя все это время. В моем Х6 версия прошивки, к сожалению, 1.3. Это значит, что менять что-то в настройках при помощи Ассистента_Х8 чревато “нехорошими” последствиями. Например, у меня установлена высота подъема при возврате домой 10м, а хотелось бы 20. Напряжение авто возврата 6.8в, а надо бы 7в. На буржуйском форуме в последнее время целая буча по поводу того, что владельцы версии 1.3 не могут без последствий воспользоваться Ассистентом. Это возможно только начиная с версии 1.42. Об этом написал представитель Flyinf3D. Это преамбула, а теперь собственно вопрос. Если будет время, гляньте пожалуйста, какая у вас версия прошивки. Если 1.3, то как вы тогда решились на изменение высоты (может что-то еще меняли)? Или когда меняли параметры, не знали о возможных последствиях? На этом форуме нас, к сожалению, только двое и посоветоваться кроме вас, не с кем. Ответьте, пожалуйста, будет время.
С Х6 вас конечно только двое, но мозги то у Х6 те же что и у Х8, так что позволю себе ответить.
У меня Х8 версии 1.3 и я успешно меняю параметры с помощью ассистента. Но ассистент нужен версии 1.2.2 где его взять смотрите пост №259 от вашего учителя 😃
С Х6 вас конечно только двое, но мозги то у Х6 те же что и у Х8, так что позволю себе ответить.
У меня Х8 версии 1.3 и я успешно меняю параметры с помощью ассистента. Но ассистент нужен версии 1.2.2 где его взять смотрите пост №259 от вашего учителя 😃
Андрей, спасибо за участие. У меня версия Ассистента 1.3.0. Почему вы говорите, что надо именно 1.2.2. Это достоверные данные, что только с этой версией можно работать?
А где вы взяли 1.3.0? 😃 У вас есть достоверные данные что с ней можно работать? 😃
Я пробовал 1.3.0, взятую с http://bigflyshark.com. У меня с ней соединиться не получилось.
В 1.2.2 присутствует логотип Flying3D. Думаю она как-то допилена для соединения с нашими аппаратами.
На достоверность не претендую, рассказываю то что пробовал сам 😃
Судя по картинке, Вячеслав тоже 1.2.2 использовал.
Я пробовал 1.3.0, взятую с bigflyshark.com. У меня с ней соединиться не получилось.
Все правильно, 1.3.0 я скачал с сайта разработчика, коптер прекрасно с ней соединился. Я увидел там версию своей прошивки, параметры полета, которые хотел бы поменять, но не рискнул. Неужели надо вернуться назад, и установить 1.2.2?
Это Х6 не конктится?
мой Х8 приконектился
Кстати, вроде все перечитал, но все-равно получил небольшой краш.
Оказывается когда летишь на большой скорости в ручном режиме и включаешь GPS режим, коптер делает элегантный кувырок с падением на землю.
(хорошо что летал без обвеса и над мягкой землей).
Насколько я помню, аппарат во время кувырка автоматом гасит движки. Получается если кувырок произойдет на хорошей высоте, то он просто камнем грохнется на землю.
В 1.2.2 присутствует логотип Flying3D
А где логотип Flying3D?
Все правильно, 1.3.0 я скачал с сайта разработчика, коптер прекрасно с ней соединился. Я увидел там версию своей прошивки, параметры полета, которые хотел бы поменять, но не рискнул. Неужели надо вернуться назад, и установить 1.2.2?
Можно ссылочку на 1.3.0 на официальный сайт? А то я что то не смог там найти.
А где логотип Flying3D?