Syma X8C

Зашел на бреющем? 😃
Да, там подъемчик был, не учёл, да еще и пальцы уже замерзли. Кстати о скорости, поставил OSD с GPS (Tarrot 300) и теперь знаю скорость. В среднем около 20-25 км/ч, но иногда мне удавалось разогнаться до 50 км/ч, при этом ветра почти не было, использовал небольшое снижение с набором скорости.
Кстати о скорости, поставил OSD с GPS (Tarrot 300) и теперь знаю скорость
Можно немного подробнее? Как прикрутили osd tarrot 300
Подарила жена симу x8c, мне очень понравилась,
Купил g движки, разобрал сравнил со штатными, разница только в магнитах.
Припаял к пульт антенну от роутера, замеряли дальность, в городе ( дома, деревья и тд…) 360 метров четкий сигнал. Замеряли держа пульт и аппарат в руках. В поле 564 метра ( полёт) есть видео. Расстояние замеряли по Гугл картам, так же заменил штатную камеру на вижеорегистратор мио, вес составил 64 грамма, + есть дисплей можно тут же все посмотреть, в планах fpv и акум на 4000 mah, ну и покрасил немного симу:)
Всем привет! Тоже жду Симу X8. Заказал дополнительно подвес для камеры,и вот эти движки. Пытаюсь выпытать у продавца информацию про них. Точно ли они оригинальные и тп. Как ответит- отпишусь. Спасибо всем , писавшим в ветке. Вы очень помогли в выборе!!!😛;)
Вот движки - эт палево или че?? какието не такие как раньше были
Добрый день форумчане!
Хочу сказать несколько слов в защиту “хвостиков”-антенн. Все сразу кидаются их перепаивать а потом хвастаются что дальность стала “300+”, но при этом мало кто проверял что было до “перепайки”. Вот мой опыт: открыл пульт и саму Симу, у меня как раз те самые хвостики вместо “настоящих” антенн, подправил расположение на более менее вертикальное. И вот мой первый FPV полет без всяких перепаек сразу на 460 метров. Связь кстати ни разу не прерывалась, а вот видео немного колбасило, возможно влияние близкой ЛЭП, поэтому я дальше не полетел. Сразу отмечу что летать на такое расстояние без FPV просто не реально, уже через 150-200 метров аппарат почти не видно и не слышно. А теперь о потенциале, мы с другом расположились в прямой видимости на расстоянии 1100 метров! и при определенных расположениях антенн мне удалось на короткое время взлететь на пару метров и приземлится управляя аппаратом по FPV, но связь очень не устойчива и очень сильно зависит от взаимного положения антенн пульта и аппарата. А если аппарат стоит задом ( т.е. антенна загорожена платой и аккумом) то связи уже вообще никакой. Выводы следующие: антену нужно выводить наружу и самое главное, ставить и на пульт и на Симу клевера, т.к. они не зависят от взаимного положения, тоже самое и с видео передатчиком. Моя цель 800-900 метров, дальше нет смысла, т.к. просто не хватит аккума долететь.Это мой первый полет по FPV, поэтому куча ошибок в управлении и небольшой микрокраш в конце.
Сергей, а что за камера на ней стоит ? Это сима 8г или я не прав ? Я на ютубе видел что ставят обычные антенны выносные, типа “палка” и на пульт и на симу, крепят её к корпусу симы сбоку и загибают вниз… получается типа 5-ая нога но только чуть по короче и мне кажется что такая антенна будет не хуже клевера ловить сигнал.
Купил g движки, разобрал сравнил со штатными, разница только в магнитах.
Антон, а чем движки g от обычных отличаются ? Меньше потребляют или более оборотистые ?
Можно немного подробнее? Как прикрутили osd tarrot 300
Не мудрствуя лукаво, на скорую руку. Плату и GPS-модуль в корпус запихал (в пласиковых пакетиках), провода на видео вход/выход наружу. На подвесе RunCam HD - с него идет видео (провод был в комплекте), к ноге прикрутил видеопередатчик TS5823 с антенной. Питание от балансировочного разъема ходового аккума. В начале думал будут наводки или как у одного из форумчан OSD вырубает на полном газе, но толи мне повезло с платой толи с Симой, ни наводок ни отрубаний не произошло ни разу за уже десяток полетов. А газовал я по полной. Чуть погодя всё припаяю на постоянку, аккуратно. Вес всего хозяйства (Камера+подвес+Видеопередатчик+OSD+GPS+маяк) -около 100 гр. Подвес кстати сам докумекал, из материалов только 1 стальной тросик (1мм), всё остальное комплектное. Желе вроде не наблюдаю, но есть раскачка из стороны в сторону, буду переделывать.
Сергей, а что за камера на ней стоит ? Это сима 8г или я не прав ? Я на ютубе видел что ставят обычные антенны выносные, типа “палка” и на пульт и на симу, крепят её к корпусу симы сбоку и загибают вниз… получается типа 5-ая нога но только чуть по короче и мне кажется что такая антенна будет не хуже клевера ловить сигнал.
Антон, а чем движки g от обычных отличаются ? Меньше потребляют или более оборотистые ?
Ну больше тяга как пишут, на данный момент у меня стоит 2 штатных 2g летаю норм
Сергей, а что за камера на ней стоит ? Это сима 8г или я не прав ? Я на ютубе видел что ставят обычные антенны выносные, типа “палка” и на пульт и на симу, крепят её к корпусу симы сбоку и загибают вниз… получается типа 5-ая нога но только чуть по короче и мне кажется что такая антенна будет не хуже клевера ловить сигнал.
Нет это RunCam HD. Фото в предыдущем посте. А по поводу не хуже клевера, могу сказать что на расстоянии метров 300-400 это так, но дальше когда начинаешь крутится и гонять наклоняя аппарат, сигнал уже слабый и начинает пропадать из за не соосности антенн. И самая худшая ситуация когда аппарат прямо над тобой (у обычных антенн в этом направлении самый худший сигнал), тут вообще как ни крути можно попасть, либо перед полетом загибать антенну специально для такого полета. В общем клевер - решение всех таких проблем.
Не мудрствуя лукаво, на скорую руку. Плату и GPS-модуль в корпус запихал (в пласиковых пакетиках), провода на видео вход/выход наружу.
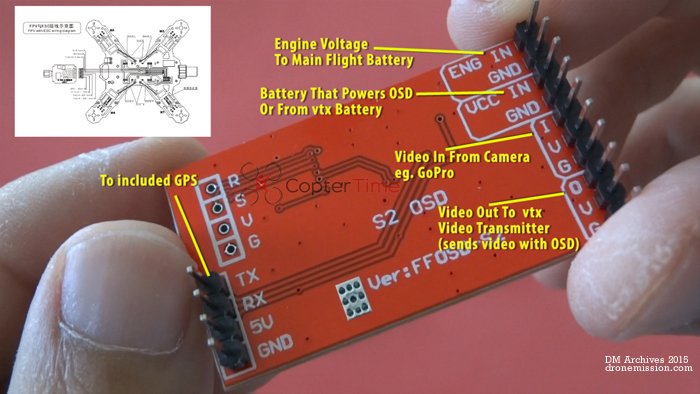
Как запитывали OSD и как подключали видеосигнал от камеры? На фото видно, что видео вход и выход по 3 провода. 1- видео сигнал, второй gnd, а третий что?
Я правильно понимаю, что по показаниям OSD можно легко определить где твое исходное положение и вернуться если потерялся и улетел в незнакомое место?
Добрый день господа ! Кто пользует FPV , а точнее приемник RC 805 может ли он корректно работать от 2S ? Просто в описании в начале указано питание приемника 5V , и дальше пишут входное напряжение 12V . Или может другой какой приемник посоветуете или преобразователь повышающий . Не хочу только из-за него акум и зарядку брать , т.к. 2S акумов навалом . Смотрел по этой ссылке (не реклама) ru.aliexpress.com/item/…/1137027345.html
Как запитывали OSD и как подключали видеосигнал от камеры? На фото видно, что видео вход и выход по 3 провода. 1- видео сигнал, второй gnd, а третий что?
Я правильно понимаю, что по показаниям OSD можно легко определить где твое исходное положение и вернуться если потерялся и улетел в незнакомое место?
По порядку: Питание от ходовой батареи подал на VCC IN, на ENG IN подают для контроля питания ходовой батареи, это когда на видео идет отдельная батарея, а у меня одна. Видео с камеры подал на контакты I и G, третий это питание (у меня в камере свой аккум), на видео передатчик идет три провода O-Видео, G-земля и V-питание. Важно: Питание идет сквозное от аккума (VCC IN) поэтому на контактах V-ровно напряжение аккума, смотрите что бы ваш передатчик и камера поддерживали это напряжение если вы питаете их от этих контактов.
По поводу показаний координат OSD и возврата домой: В показателях на экране есть стрелка “Домой”, но пока летал не мог понять, т.к. показывал всякую чушь. Потом в спокойной обстановке дотумкал, что в нём нет магнитного компаса, а направление определяется только по GPS и поэтому “компас” работает только в движении! Для определения направления нужно заложить круг на скорости, тогда все ОК и можно вернуться домой. А теперь практика: с высоты 100метров и дальности 200-250метров (безопасный полет) и без всяких компасов видно откуда вылетел, как будто и не отлетал, главное выбрать заранее заметные ориентиры. Кстати проверял стабильность работы OSD от 2S аккума, всё ок до 6в, т.е. когда квадрик уже будет валятся. Видео передатчик тоже примерно до такого напряжения держит связь.
Тем кто приобрел маячки “Тигромух”, могу сообщить что он прекрасно общается с GPS модулем от этой OSD и бодро сообщает свои координаты. Сооединил двумя проводами на провода идущие от GPS к GRN и Rx.
P.S. Несколькими постами выше есть видео про скорость Симы, так там в верху есть этот указатель “домой” и если присмотреться то видно что он показывает дельные данные только когда аппарат набирает скорость.
Тем кто приобрел маячки “Тигромух”, могу сообщить что он прекрасно общается с GPS модулем от этой OSD и бодро сообщает свои координаты. Сооединил двумя проводами на провода идущие от GPS к GRN и Rx.
Не совсем понимаю зачем дополнительный маяк и почему все ставят GPS трекеры типа TK-102 и т.д. На экране отображаются текущие координаты (lat/lon). Мы сможем точно определить местонахождение коптера, если вбить эти данные в навигатор, когда мы его потеряем? или будет неточность ±100 м?
p.s. вбил ваши координаты с видео и определил Юганска Обь;)
Не совсем понимаю зачем дополнительный маяк и почему все ставят GPS трекеры типа TK-102 и т.д. На экране отображаются текущие координаты (lat/lon). Мы сможем точно определить местонахождение коптера, если вбить эти данные в навигатор, когда мы его потеряем? или будет неточность ±100 м?
p.s. вбил ваши координаты с видео и определил Юганска Обь;)
Ну у меня нет трекера, только маячек который цепляется к GPS-модулю OSD. А для чего маячек скажу: а что вы будете вбивать если вдруг вырубится видеопередатчик или потеряется сигнал? От места последнего контакта аппарат может улететь метров на 300 в любую сторону и потом будешь как в той сказке “Ветер ветер ты могуч ты гоняешь…”. Где то на форуме уже проскакивал именно такой случай и там помог именно трекер, аппарат улетел почти метров на 700-800 (точнее не помню).
аппарат улетел почти метров на 700-800 (точнее не помню).
Согласен, тут OSD не поможет. Или ставить мощный передатчик TS832, чтобы был запас по FPV, когда управление пропадет.
А подскажите чем сима W по сути отличается от С , G - наличием камеры с вайфаем и креплением для телефона или там есть более существенные доработки ? Грубо говоря имею свою вай фай камеру и телефон я могу попытаться реализовать ту же W версию ?
Сам квадрик отличается от C и G только цветом и более слабыми моторами, чем у G.
Имея свою wi fi камеру, Вы никак не решите главную проблему штатной камеры версии W. А именно: сигнал от камеры забивает сигнал от пульта и сима падает на расстоянии 20 метров от Вас.
А подскажите чем сима W по сути отличается от С , G - наличием камеры с вайфаем и креплением для телефона или там есть более существенные доработки ? Грубо говоря имею свою вай фай камеру и телефон я могу попытаться реализовать ту же W версию ?
Разница только в камере и в комплекте, и все))) Если камера работает на чисто те 2.4 а это скорее всего так то канал камеры будет создавать помехи и сима будет просто падать))хотите фпв - нужен передатчик на 5.8 ))
Разница только в камере и в комплекте, и все))) Если камера работает на чисто те 2.4 а это скорее всего так то канал камеры будет создавать помехи и сима будет просто падать))хотите фпв - нужен передатчик на 5.8 ))
Ну супер ) я вообще в курсе про помехи на 2.4, но детство в одном месте играет попробовать этот вариант - для чего то же запускали модель W , как то оно должно работать ) !
И тут народ все хвалится готовым недорогим комплектом на 5.8 и даже я нечто подобное тут находил , да видать не совсем то, был бы признателен за ссылочку. )
спасибо
Согласен, тут OSD не поможет. Или ставить мощный передатчик TS832, чтобы был запас по FPV, когда управление пропадет.
В том случае и это бы не помогло, там квадрик потерял прямую видимость уже через 300-400 метров и не помогло бы и 2 вата на передатчике. Вывод из все этого такой, маяк нужен на случай: 1) Выход из строя видеопередатчика. 2) Не возможность приема сигнала из-за помех. 3) Потеря прямой видимости из за рельефа или строений. 4) Ну и сама плата OSD может выйти из строя.
Два дня не был в инете, а тут на ветке столько новостей!
Я так понимаю, что начался новый этап освоения Симы - прикрутить на неё OSD
поставил OSD с GPS (Tarrot 300) и теперь знаю скорость
А ссылочку можно на это OSD?
А ссылочку можно на это OSD?