WLtoys V686G FPV RC Quadcopter

Разъем аккумулятора тоже сильно грелся. На новых аккумуляторах не греется.
А доработка аккумуляторного отсека нужна? Размер подходит?
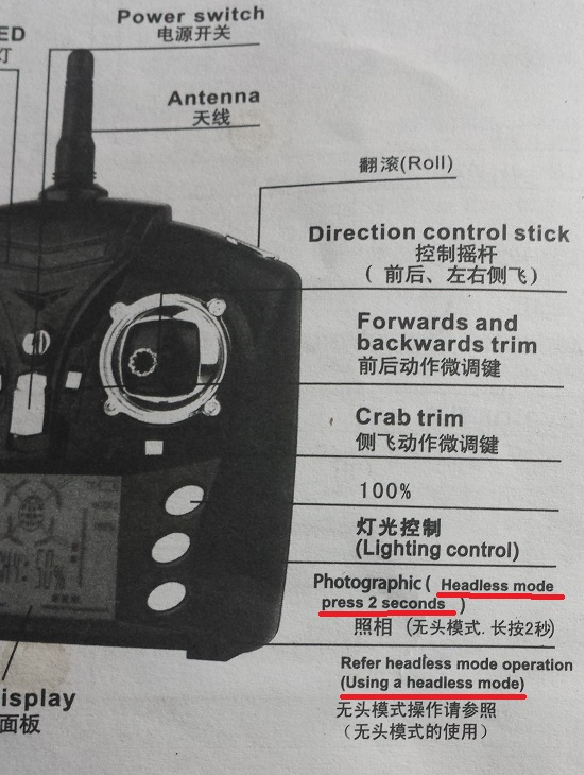
Тоже проблема с хандлес. Включаю сразу краш. Как будто гироскоп перестаёт работать. Включает 2 винта и в низ. Мож кто понял по инструкции в чём разница средней и нижней кнопки. (падает после нижней)
upd: дошло… средняя кнопка только свет
нажатие - нижняя фото
2сек - зажать хандлес
нажатие (в хандлес) - выключить его
попробовал вчера дель флипы - работают нормально.
а RTH и headless - это что такое?
и как активируются?
RTH - функция возврата к пульту (левая верхняя кнопка, где антенна - зажать на 2-3сек)
headless -
это режим при котором квадрик, в каком он положении не находился бы, боком или передом, будет управляться так, будто он повернут к вам задом. То есть, если вы далеко улетели и не можете понять как он расположен относительно вас, вы включаете данный режим и просто тянете стик на себя, квадрик же, будет лететь назад к вам даже если повернут боком.
Вот это парень - респект и уважуха!
А доработка аккумуляторного отсека нужна? Размер подходит?
Нет, доработка не нужна. У меня вообще отсек сломался при падении. Новые аккумуляторы как раз тесно влезают, а родной - болтается.
Если кому интересно “прокачать” дальность/стабильность управления:
- Есть смысл заменить антенну передатчика на антенну от Wi-Fi роутера. Собственно, это был мой первый мод, после которых я стал подбирать длину антенны в приемнике. Добился управления от 110 метров в стоке до ~190м после замены.
- Длина приемной антенны должна быть строго 31,2 мм. При этом нужно учитывать проводники на плате, сам проводок должен быть в итоге около 26-27 мм. Я припаял медный провод (одножильный, 0.8 мм2) 27 мм и потом напильником подбирал точную длину. Примерно на 4-м аккумуляторе получил максимальную управляемость на дистанции 150-200м при любом положении - вверху и по горизонтали. Если у вас из коробки летает на 100-120 метров, то длину проводника лучше не менять. Я сам все испортил и потом долго возвращал “как было”.
- В планах поставить самодельный усилитель 2.4 ГГц на микросхемах типа RF2126 (обещают до 1 Вт мощности). Зачем? Хочу отработать технологию сборки и примения таких усилителях. Если повезет - то применить в будущем уже на серьезном аппарате.
- Также в планах - усилить сигнал 5.8 ГГц от FPV по примеру п.4.
Общие доработки: - Заказал и жду линзу с бОльшим углом захвата.
- Хочу обновить прошивку, чтобы нормально заработал Headless mode.
- Поставить антенны типа “клевер” на FPV 5.8 ГГц, есть много подтверждающих видео о увеличении качества сигнала.
Неудачные ветки доработок:
- Решил поставить антенну “клевер” 2.4 ГГц на линию управления. Стало только хуже, откатил все назад.
- Долго экспериментировал с длинами антенн без углубления в теорию. Остановился на п.2 (см. выше).
Результаты на сегодняшний день:
- Добился управления до 200м.
- Благодаря аккумуляторам 1200 mAh время полета с включенной камерой возросло до 12 минут в активном режиме (постоянно полный газ, маневрирование).
Общее количество - 5шт позволяет полностью насладиться полетом, хотя и двигатели нагреваются, приходится делать паузы на 10-20 минут. - Сломал один двигатель полностью (из-за перегрева), хорошо, что сразу заказал два запасных. Остальные двигатели стали туже крутиться.
- Отлетал всего около 80-100 полных аккумуляторов, были очень жесткие падения: крепление камеры отвалилось, посадочные ножки давно сломаны, разумеется.
Из-за увеличения дальности управления однажды ветром унесло аж на 450 метров от точки взлета (я до последнего пытался вернуть назад, давал газ на полную, чтобы не терять из поля зрения, но перепутал стороны), нашел в лесу на дереве. Если бы питание камеры отошло, то уже потерял бы, помог только FPV (бегал как с маячком, рисуя спирали от точки взлета).
Прошу откликнуться тех, у кого нормально работает Headless и RTH. Сфотографируйте, пожалуйста, плату квадрокоптера в хорошем разрешении.
- Решил поставить антенну “клевер” 2.4 ГГц на линию управления. Стало только хуже, откатил все назад.
Интересный и полезный опыт. Хуже - это дальность пострадала? Намного? Cкажите - какую конкретно антенну ставили? Если покупали - ссылку приведите pls.
- Есть смысл заменить антенну передатчика на антенну от Wi-Fi роутера. Собственно, это был мой первый мод, после которых я стал подбирать длину антенны в приемнике. Добился управления от 110 метров в стоке до ~190м после замены.
Антенну какую попало поставили или конкретную? Ссылка есть?
Интересный и полезный опыт. Хуже - это дальность пострадала? Намного? Cкажите - какую конкретно антенну ставили? Если покупали - ссылку приведите pls.
Антенну собирал сам. Разумеется, погрешность сборки значительно повлияла на результат. Заказывать - жаба задушила. Дальность упала до 50 метров.
Антенну какую попало поставили или конкретную? Ссылка есть?
Антенна от DIR-320. Сейчас я вывел разъем на пульт и можно экспериментировать с антеннами, о чем, я кстати, забыл. Переберу еще пару роутеров из дома/с работы.
Наклон антенны и положение пульта в пространстве тоже сильно влияет на дальность приема, пока не могу объяснить, как именно, пока просто меняю наклон антенны по интуиции.
Headless mode работает, проверял специально.
Сфотографируйте, пожалуйста, плату контроллера квадрокоптера. Хочу понять, с какой версии появилась поддержка этого режима.
Наклон антенны и положение пульта в пространстве тоже сильно влияет на дальность приема, пока не могу объяснить, как именно, пока просто меняю наклон антенны по интуиции.
Они обязательно будут влиять для штыревых антенн и что самое неприятное, оптимальный угол наклона будет зависеть от текущего положения квадрокоптера (и его антенны). Идеальный вариант - когда обе антенны находятся строго параллельно друг другу - но это вы вряд ли сможете обеспечить. Разве что поставите коптер неподвижно и не будете его трогать. 😃
Для того и придумали антенны с круговой поляризацией, чтобы не зависеть от положения…
Подтверждаю, у меня тоже headless mode работает, довольно стабилен. Причем, если квадрик к тебе повернут диагональю, при нажатии стика назад, он так по диагонали к тебе и летит.
Сфотографируйте, пожалуйста, плату контроллера квадрокоптера. Хочу понять, с какой версии появилась поддержка этого режима.
пробовал сегодня еще раз в разных вариантах.
не работает headless mode и RTH.
но как оно снимает видео мне нравится.
несколько раз летал на максимальную высоту, терялся видео сигнал и управление, и оба раза камера не записала полет(очень жаль), точнее создались файлы пустые 2кб, в чем может быть причина? сессия записи рвется? разве при потере сигнала камера выключается?
несколько раз летал на максимальную высоту, терялся видео сигнал и управление, и оба раза камера не записала полет(очень жаль), точнее создались файлы пустые 2кб, в чем может быть причина? сессия записи рвется? разве при потере сигнала камера выключается?
У вас работает Headless mode и возврат домой?
У вас работает Headless mode и возврат домой?
возврат работает, хэдлесс не проверял
возврат работает, хэдлесс не проверял
Проверьте, пожалуйста, Headless. Возврат домой “умный”, или просто тупо летит назад? У меня как раз второй случай - если квадрик развернуть в пространстве, то он так и улетит от меня, пока связь не пропадет.
несколько раз летал на максимальную высоту, терялся видео сигнал и управление, и оба раза камера не записала полет(очень жаль), точнее создались файлы пустые 2кб, в чем может быть причина? сессия записи рвется? разве при потере сигнала камера выключается?
Причина - слабый родной аккумулятор. Прочитайте повыше, я подробно описал, почему так происходит и как бороться.
Если RTH работает нормально, то сфоткайте, пожалуйста, плату контроллера.
У меня как раз второй случай - если квадрик развернуть в пространстве, то он так и улетит от меня, пока связь не пропадет.
вот кстати не обратил внимание, надо еще раз проверить, отпишу наверно завтра
Испытал высоту на пределе видимости, квадрокоптер превратился в точку.
Максимальная высота - примерно на 1:40-1:50.
высота реально круто - метров 200-300 на вид.
полеты в городе где вокруг люди - совсем не круто.
а почему так изображение плавает? камера родная?
высота реально круто - метров 200-300 на вид.
полеты в городе где вокруг люди - совсем не круто.
а почему так изображение плавает? камера родная?
Выбрал утреннее время (07:00), но людей оказалось больше, чем рассчитывал. Вообще, вполне можно летать по городу в 4 утра - света достаточно для съемки, а на улицах 1 человек на квадратный километр.
Камера родная, пережила множество жестких падений (собственно, как и весь квадрокоптер). Раньше такого не было, видимо, что-то отвалилось/отпаялось на плате. Заметил, что она прилично греется. Не помню, грелась ли из коробки после 5 минут полета. На видео используется уже второй аккумулятор, т.е. может быть и перегрев.
Обычно на пределе разрыва связи бывают “провалы” - газ сам сбрасывается, управление залипает.
Сейчас же не было разрывов и радиоуправление позволяло подняться еще выше. Для города очень хорошо. Кажется, наконец смог подобрать точную длину приемной антенны (напильником подбирал по 0,2-0,5мм).
полеты в городе где вокруг люди - совсем не круто.
В данном конкретном случае думаю все не так страшно. Вес данного коптера - 100 грамм, причем довольно большая парусность. Даже если он кому либо на голову упадет с высоты, думаю не то что травмы не нанесет, но даже и не ударит сильно. Тем он мне и нравился (пока “в точку” не превратился и не исчез в небе).
А вот если какую либо бандуру килограммовую типа Walkera QR X350 PRO или фантома в городе бахнуть - то тогда да, это совсем не круто может оказаться. Вот с такими коптерами нужно быть крайне осторожным. Скоро мне CX-20 придет, вот с ним постараюсь быть гораздо аккуратнее, чем с v686g.
Вот что написано на плате: JR-WL-686R-REV03 2014/12. Включение Headless: подключаем батарею, затем поворачиваем аппарат вокруг оси два оборота против часовой стрелки, затем включаем пульт и ждём когда перестанет мигать подсветка на лучах. Всё…можно лететь. Режим включается длительным нажатием правой нижней кнопки на пульте, при этом пульт издаёт мерзкие гудки. Направление полёта в режиме Headless соответствует положению аппарата в момент подключения батареи, т. е. если надо, что бы летел вперёд, крышка батарейного отсека должна смотреть вперёд!
Даже если он кому либо на голову упадет с высоты, думаю не то что травмы не нанесет, но даже и не ударит сильно
Не забывайте про то что винты вращаются с высокой скоростью и могут нанести серьёзные раны.
Направление полёта в режиме Headless соответствует положению аппарата в момент подключения батареи, т. е. если надо, что бы летел вперёд, крышка батарейного отсека должна смотреть вперёд!
вот этого не понял? это как?
а выключается как?
Вот что написано на плате: JR-WL-686R-REV03 2014/12. Включение Headless: подключаем батарею, затем поворачиваем аппарат вокруг оси два оборота против часовой стрелки, затем включаем пульт и ждём когда перестанет мигать подсветка на лучах. Всё…можно лететь. Режим включается длительным нажатием правой нижней кнопки на пульте, при этом пульт издаёт мерзкие гудки. Направление полёта в режиме Headless соответствует положению аппарата в момент подключения батареи, т. е. если надо, что бы летел вперёд, крышка батарейного отсека должна смотреть вперёд!
Спасибо, попробую сегодня же. Как вы узнали о таком хитром способе? В инструкции вообще ерунда какая-то написана.
Не забывайте про то что винты вращаются с высокой скоростью и могут нанести серьёзные раны.
Тут есть несколько моментов: если винты активно крутятся, то коптер вроде как не должен падать. Если сломался один из двигателей и газ активно подается с пульта, то да, будет падать и молотить в фарш. Хотя, обычно при потере визуального контроля остается только сбросить газ и идти искать аппарат.
Однажды у меня прямо в воздухе отвалилась антенна (плохо припаял). Понял по тому, что вдруг пропало управление, коптер стал падать, но не в произвольном положении, а строго горизонтально. Винты закрутились, скорость падения была достаточно низкая. На расстоянии ~20 метров связь установилась и коптер успел стабилизироваться (роль антенны выполняют и дорожки на плате).
Планирование легко проверить - на высоте нужно сбросить газ до нуля и коптер через ~10-20 метров падения сам займет устойчивое положение и начнет вращаться вокруг своей оси.
Но это опасно: если не успеть понять, где перед у коптера перед/зад, то можно его увести от себя еще дальше, вплоть до потери. Поэтому удобно применять этот способ при падении строго над собой.