Hubsan Zino RTF - H117S

- А вверх он сам лез, пока в лимит не упёрся.
- Мавик уже на ста метрах начал бы показывать предупреждение о ветре, а на трёхстах орал бы об этом безостановочно
- Если стик газа был отпущен, с чего бы это он сам поднимался вверх ? Ждем комментарии Ярослава.
- Теперь, если Ярослав купит второй Зино, сумма вложений приблизится к стоимости б/у Мавика.
P.S. После ситуации у Ярослава, я очень сильно задумался об установке GPS-трекера.
Хоть мой Хабсан и покупался б/у, за 12 т.р., все-равно, трекер дешевле.
Для полетов в городе, достаточно поискового маяка с сим-картой, приклеенного/привязанного коптеру на корпус.
Для полетов за городом, где может не быть сигнала GSM, лучше использовать маяк, работающий по радио-сигналу от рации.
Жалко, что интерфейсе программы не отображается работа стиков на пульте.
Было бы неплохо для полного анализа.
Как раз, таки, отображается. Справа вверху плашка, а на ней параметры T, E, R, A в процентах.
Правый стик вообще не трогал до высоты 300 метров, когда увидел, что удаление от дома 200м начал его разворачивать и лететь к дому и вверх одновременно, но к дому он не летел…
Поднимаясь вверх только левым стиком, он должен был удерживать позицию на точкой взлёта.
Но, скорость бокового ветра ему было не преодолеть и данные телеметрии как-раз таки и показывали скорость сноса. Вначале она была небольшой, но с набором высоты начинала усиливаться:
Высота/скорость сноса:
300 / 2
340 / 3,3
360 / 4,3
380 / 5,2
400 / 6,5
Вывод - если квадр вместо того, чтобы удерживать позицию улетает в сторону, нужно начинать снижение. И не стоит лететь к себе против ветра, нужно сначала снизится на малую высоту, где скорость ветра меньше и уже потом возвращаться “к дому”.
Режим “RTH” так же не будет иметь эффекта на большой высоте с боковым ветром.
Как раз, таки, отображается. Справа вверху плашка, а на ней параметры T, E, R, A в процентах.
Сейчас пересмотрю видео еще раз.
Итак 40 дней доставка с банга, из них 29 по рф!!! Причем без отслеживания.
На сайте максипоста в трекинге никаких упоминаний, что передано почте россии. Только после неоднократных звонков (напомню, на мыло они не отвечают видимо из принципа) сегодня появился трек, что передано почте россии и номер нашего отправления, и вычснилось, что он уже 10 дней лежит на почте. Почему лежит? Да потому что максипост при перемаркировке даже не удосужились адрес перенабрать полностью - только город и улица? Лол!

Зы: батарея дрона пустая, у пульта половина зарядки.
Первое впечатление от «подержать в руках» - норм, лучше чем ожидал.
Как раз, таки, отображается. Справа вверху плашка, а на ней параметры T, E, R, A в процентах.
Видео пересмотрел:

Т - газ R - вращение
Е - тангаж А - крен
Обратите внимание на Yaw с 2:17. В 2:17 Yaw показывает 13-почти строго на север. После этого дрон поворачивает к западу, но Yaw не меняется. На 3:15 дрон смотрит почти строго на северо-запад на зашедшее солнце, но Yaw все те же 13, хотя минутой раньше на 2:08 почти в том же направлении Yaw показывал 313. Явно после 2:17 компас перестал правильно работать
Ярослав, у коптера раньше начались проблемы (с 0:50). Уже при подъеме на 85 метров, коптер плавно разворачивался влев о.
Далее, на 85 метрах ты начал изменять настройки видео, а коптер продолжал вращение влево.
Значит, с самого начала полета была нарушена калибровка вращения ?
Ты перед тем, как подниматься ввысь, не подвесил его перед собой и не посмотрел, как он удерживает позицию на месте, в том числе и по вращению.
Это проблемы с прошивкой, или с железом ?
Нужно пересмотреть твое первое видео, где коптер нормально летал.
Угол поворота 79 град.

По факту коптер повернулся влево на 45 градусов, а его компас по прежнему видит 77 град.

батарея дрона пустая
кстати липо аккумулятор нельзя хранить в заряженном и разряженном состоянии
Поднимаясь вверх только левым стиком, он должен был удерживать позицию на точкой взлёта.
Но, скорость бокового ветра ему было не преодолеть и данные телеметрии как-раз таки и показывали скорость сноса. Вначале она была небольшой, но с набором высоты начинала усиливаться:Вывод - если квадр вместо того, чтобы удерживать позицию улетает в сторону, нужно начинать снижение. И не стоит лететь к себе против ветра, нужно сначала снизится на малую высоту, где скорость ветра меньше и уже потом возвращаться “к дому”.
Режим “RTH” так же не будет иметь эффекта на большой высоте с боковым ветром.
Именно об этом я и писал. А если бы была возможность жёсткого указания высоты RTH - он бы после отвала опустился бы и вернулся. Это всё делается программно в аппликации ( должно делаться по-крайней мере )
Видео пересмотрел:
Т - газ R - вращение
Е - тангаж А - кренСмутило то, что при подъеме до 85 метров, использовался только стик газа на 100%, а коптер плавно разворачивался влево.
Далее, на 85 метрах пилот начал изменять настройки видео, а коптер продолжал вращение влево.
Значит, с самого начала полета была нарушена калибровка вращения ?
Это проблемы с прошивкой, или с железом ? Нужно пересмотреть твое первое видео, где коптер нормально летал.По факту коптер повернулся влево на 45 градусов, а его компас по прежнему видит 77 град.
Меня тоже очень настораживают показания компаса…
кстати липо аккумулятор нельзя хранить в заряженном и разряженном состоянии
Вы хотели сказать о длительном хранении ?
Именно об этом я и писал. А если бы была возможность жёсткого указания высоты RTH - он бы после отвала опустился бы и вернулся. Это всё делается программно в аппликации ( должно делаться по-крайней мере )
Насколько я помню, возврат домой в режиме RTH осуществляется на той высоте, где он находится, если она выше заданной ?
Грубо говоря, находясь на высоте 400 м., режим RTH поведет его к месту взлета на этой же высоте, без снижения.
Находясь на высоте 30 м., режим RTH поднимет коптер до 100 м. (у каждого свои настройки) и поведет его к месту взлета.
Меня тоже очень настораживают показания компаса…
Ярослав, это твой первый коптер ?
Среди квадро-пилотов есть негласное ПРАВИЛО, которое гласит, что перед дальним полетом нужно потратить минуту и на месте, перед глазами проверить работоспособность компаса и барометра, проверить режим RTH и по возможности Follow Me. И только после успешной проверки отправляться в полет.
Вы хотели сказать о длительном хранении ?
Насколько я помню, возврат домой в режиме RTH осуществляется на той высоте, где он находится, если она выше заданной ?
Грубо говоря, находясь на высоте 400 м., режим RTH поведет его к месту взлета на этой же высоте, без снижения.
Находясь на высоте 30 м., режим RTH поднимет коптер до 100 м. (у каждого свои настройки) и поведет его к месту взлета.Ярослав, это твой первый коптер ?
Среди квадро-пилотов есть негласное ПРАВИЛО, которое гласит, что перед дальним полетом нужно потратить минуту и на месте, перед глазами проверить работоспособность компаса и барометра, проверить режим RTH и по возможности Follow Me. И только после успешной проверки отправляться в полет.
Нет, не первый, есть ещё Чирсон и всё я это знаю, но наивно понадеялся, что все будет хорошо. И в этом я совершил ошибку. Ну что ж теперь сделать, людям свойственно ошибаться…
Насколько я помню, возврат домой в режиме RTH осуществляется на той высоте, где он находится, если она выше заданной ?
Посмотрите мой пост выше. У диджиаев эту опцию можно отключить и дрон опустится на высоту возврата. Так ДОЛЖНО быть и у Зино, не знаю - есть ли
Ярослав, в первом твоем видео о полете вдаль, коптер все время сносит вправо, но направление 68 град. не меняется
У тебя правый стик в тангаже на 100% и в 0% крена.
Гироскоп коптера видит 19 град. тангажа и при этом у тебя идет крен вправо на 4 град., хотя правый стик не совершает крен !!!
У тебя там что, всегда сильный ветер ?

Посмотрите мой пост выше. У диджиаев эту опцию можно отключить и дрон опустится на высоту возврата. Так ДОЛЖНО быть и у Зино, не знаю - есть ли
Всегда ли то, что есть у Мерседеса, ДОЛЖНО быт ь и у Хундая ?
Всегда ли то, что есть у Мерседеса, ДОЛЖНО быт ь и у Хундая ?
Извините, но это программная доработка, не аппаратная. И я не считаю, что это нечто сложное, интеллектуальные режимы намного сложнее в реализации, чем возможность указания высоты при возврате домой, причём в этом и сам Хабсан должен быть сильно заинтересован
Вы хотели сказать о длительном хранении ?
40 дней дороги в Россию, плюс од Хубсана в Banggood, это не длительное хранение? Разрядка даже кратковременная ниже 3,0v на банку это убийство банки.
Ярослав, при первом твоем видео а полете вдаль, коптер все время сносит вправо, но направление 68 град. не меняется
У тебя правый стик в тангаже на 100% и в 0% крена, гироскоп коптера видит 19 град. тангажа и при этом у тебя идет крен вправо на 4 град., хотя правый стик не соершает крен !!!
У тебя там что, всегда сильный ветер ?Всегда ли то, что есть у Мерседеса, ДОЛЖНО быт ь и у Хундая ?
Нет, ветер не всегда такой у меня) но то что коптер разворачивало изначально, хотя стик находился по направлению вперёд, я заметил сразу и кстати не у меня одного его так разворачивает при полете вперёд…
Извините, но это программная доработка, не аппаратная. И я не считаю, что это нечто сложное, интеллектуальные режимы намного сложнее в реализации, чем возможность указания высоты при возврате домой, причём в этом и сам Хабсан должен быть сильно заинтересован
Все верно. В программе у Хабсана установлена минимальная высота возврата 10 метров, но если коптер находится выше, для чего он должен спускаться ниже. Он с актуальной высоты полета возвращается к месту взлета и уже потом ничинает вертикальный спуск вниз.

Все верно. В программе у Хабсана установлена минимальная высота возврата 10 метров, но если коптер находится выше, для чего он должен спускаться ниже. Он с актуальной высоты полета возвращается к месту взлета и уже потом ничинает вертикальный спуск вниз.
Я прекрасно знаю, как работает RTH. Просто в данном конретном случае было бы лучше, если бы он сначала опустился до заданной высоты RTH.
Тут вот какое умозаключение имеется:
Обратите внимание на Yaw с 2:17. В 2:17 Yaw показывает 13-почти строго на север. После этого дрон поворачивает к западу, но Yaw не меняется. На 3:15 дрон смотрит почти строго на северо-запад на зашедшее солнце, но Yaw все те же 13, хотя минутой раньше на 2:08 почти в том же направлении Yaw показывал 313. Явно после 2:17 компас перестал правильно работать После этого дрон был практически проговорен к улету, т.к. firmware явно отдает приоритет показаниям компаса для выбора направления движения, несмотря на расхождение с данными GPS по положению и направлению…
Ярослав, у коптера раньше начались проблемы (с 0:50). Уже при подъеме на 85 метров, коптер плавно разворачивался влево.
Далее, на 85 метрах ты начал изменять настройки видео, а коптер продолжал вращение влево.
Ярослав, именно в этом и ключевая проблема.
При просмотре Вашего видео первым делом тоже обратил внимание на неправильный дрейф Yaw. Промелькнула мысль, что может это камерой Вы крутите, но в конце второго дрейфа понял что это не так.
У меня тоже улетал квард (H501M) осенью. Из-за показаний компаса, влияющих на Yaw.
Вот тут описывал: rcopen.com/forum/f135/topic518172/959
Сейчас придумываю способы избавиться от этого дрейфа.
Прошивки полетного контроллера Zino и H501M максимально похожи, это уже на форуме писал. Соответственно болячки H501M перекочевали в Zino.
Но в прошивке 1.1.47 увидел максимальные изменения в части работы с компасом. В 1.0.47 их меньше. Из этой прошивки попробовал пару маленьких блоков чтения регистров компаса для моего H501M. Но от дрейфа Yaw это не помогло пока избавится.
Затем попробовал абсолютно иной компас, привязал его в прошивке, но не помогло, т.е. дело в программе.
Пару недель назад писал на вашем форуме про эксперимент с компасом:
rcopen.com/forum/f135/topic528749/1074 , но на просьбу провести такой эксперимент никто не ответил. Это помогло бы лучше разобраться в проблеме.
Ярослав, именно в этом и ключевая проблема.
При просмотре Вашего видео первым делом тоже обратил внимание на неправильный дрейф Yaw. Промелькнула мысль, что может это камерой Вы крутите, но в конце второго дрейфа понял что это не так.
У меня тоже улетал квард (H501M) осенью. Из-за показаний компаса, влияющих на Yaw.
Вот тут описывал: rcopen.com/forum/f135/topic518172/959Сейчас придумываю способы избавиться от этого дрейфа.
Прошивки полетного контроллера Zino и H501M максимально похожи, это уже на форуме писал. Соответственно болячки H501M перекочевали в Zino.
Но в прошивке 1.1.47 увидел максимальные изменения в части работы с компасом. В 1.0.47 их меньше. Из этой прошивки попробовал пару маленьких блоков чтения регистров компаса для моего H501M. Но от дрейфа Yaw это не помогло пока избавится.
Затем попробовал абсолютно иной компас, привязал его в прошивке, но не помогло, т.е. дело в программе.
Пару недель назад писал на вашем форуме про эксперимент с компасом:
rcopen.com/forum/f135/topic528749/1074 , но на просьбу провести такой эксперимент никто не ответил. Это помогло бы лучше разобраться в проблеме.
Почитал вашу историю, ситуация один в один схожа с вашей… У него даже траектория полёта в начале такая же( круги описывал - туалет) была как у вас, судя из протокола полёта… Вот тебе и компас… Я на своём чирсоне с такими проблемами ни когда не сталкивался, один раз откалибровал всё и забыл, а тут…
Настоятельно рекомендую, перед первым запуском откалибровать компас и гироскоп в домашних условиях, а заодно проверить как коптер передает телеметрию на пульт (экран смартфона).
Просто вращайте коптер на месте и смотрите на угол поворота в программе, наклоняйте и смотрите на угол крена или тангажа.
Все должно отображаться своевременно, без тормозов и зависаний.
то что коптер разворачивало изначально, я заметил сразу и кстати не у меня одного его так разворачивает при полете вперёд…
Калибровки кампаса делал ? Выходит, что дело не в прошивке, а в железе. Коптер то еще “сырой”.
Вот это и является основанием для претензии к продавцу.
Ярослав, именно в этом и ключевая проблема.
При просмотре Вашего видео первым делом тоже обратил внимание на неправильный дрейф Yaw.
Хочется понять, что же считается дрейфом, а что рысканьем ?
Поворот аппарата вокруг своей вертикальной оси - это рысканье.
Тут надо отделить мух от варенья, а именно:
Коптер совершает постоянное плавное вращение влево.
Вращение влево осуществляется легким подтормаживанием переднего правого (А) и заднего левого (А) моторов.
Может быть, что все 4 мотора вращаются одинаково, но лопасти “А” имеют иную тяговую силу, при одинаковом вращении лопастями “В”, но почему тогда компас этого не видит и не дает команду на выравнивание ?
А может быть все наоборот, компас видит вращение вправо и дает команду на вращение влево ?
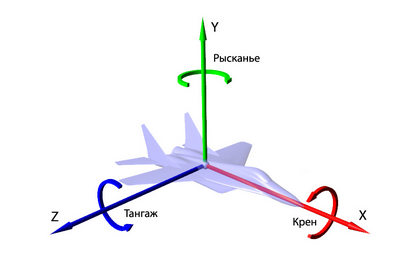
В квадриках мы называем это питч, ролл и яв )))
И да, калибровать компас дома - это плохая идея.