FPV миникоптеры на 250х рамах (ZMR, Blackout, QAV250 и т.п.)
Один из минусов регуляторов “4 в 1” - если он ломается, то попадаешь на цену сразу четырех регулей. Вероятность того, что при даже при среднем краше отлетит какая-нибудь SMD-шка с платы очень велика. И при краше попадаешь не только на ремонт рамы, но и фактически на замену ОСД, ВЕСа, CS и т.п.
ИМХО - сомнительный выигрыш в весе.
Один из минусов регуляторов “4 в 1” - если он ломается
Регули там не разведены. ESC отдельно покупать и ставить.
К счастью да! 4 в одном - зло.
Сломать внутреннюю пластину нереально ни при каком краше. Ну и всегда можно перепаять детали - там ничего сложного, или новую пластину заказать. Но выигрыш огромный - нет пучка проводов и унылого паяния всей этой требухи. И видео без помех.
Это реально круче блекаута!
Америкосы - молодцы. (Как всегда) 😃
Регули там не разведены. ESC отдельно покупать и ставить.
А я и не говорил, что на плате регули разведены. Я про то, что не всегда решение “все в одном” есть самое лучшее.
Как всегда, в Россию не доставляют.
Не готов сейчас отдать почти две сотни, но в корзину добавил и до формы заполнения адреса дощел - Россия есть, и даже города правильные при выборе подгружаются. Там дальше появляется инфа, что не доставляют? Если так, то странно как-то, что выбрать дают страну.
Там дальше появляется инфа, что не доставляют?
Warning: No Shipping options are available. Please contact us for assistance!
Я про то, что не всегда решение “все в одном” есть самое лучшее.
Там и нет решения все в одном. Там только ОСД и питание. Можно конечно сделать отдельными модулями - но я не вижу смысла городить огород. Если они будут продавать отдельно плату - сломалась, заменил.
Америкосы - молодцы. (Как всегда)
Я думаю китайцы скопируют главное чтобы не криво ).
главное чтобы к народной ZMR250 площадка подошла.
Блекаут не скопировали. Вообще не факт, что эту скопируют. К ЗМР естественно не подойдет. ЗМР кривоватая рама. Нет к ней смысла ничего делать.
А я тут внезапно выиграл 4 мотора SunnySky в лотерее от DroneMatters (600 лайков на фейсбуке), раньше никогда ничего не выигрывал в лотереях. Мелочь, а приятно =)
Я точно за тебя рад, дружище)
Собрал свой «кирпич» рама QAV250, моторы EMAX МТ1804 2480КV регули 12A SimonK Speed Controller for 250mm контроллер CC3D. При висении коптер колбасит пример на видео, через пару минут полета вибрации становятся меньше, подскажите куда копать? Летать с такой колбасьней мягко говоря не комфортно
Я в настройках не спец сейчас выглядят так, что менять?
Я в настройках не спец сейчас выглядят так, что менять?
Proportional (внизу, под Attitude Stabilization) уменьшайте пока не перестанет осциллировать. Начните со значений на моей картинке выше.
подскажите куда копать?
Регулируйте PID контроллер, слишком высокие значения. А уменьшается со временем из-за просадки батареи.
Спасибо, поменял пошел испытывать)
Я в настройках не спец сейчас выглядят так, что менять?
Попробуйте мои настройки.
Попробуйте мои настройки.
Так у Вас значение Proportional выше чем у меня. Сейчас уменьшил до Roll 1,4 Pich 1,6 Yaw 2 все равно подколбашивает, чем меньше вес, тем больше калбасня
все равно подколбашивает, чем меньше вес, тем больше калбасня
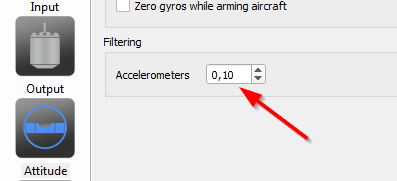
Может быть из-за вибраций? Попробуйте фильтры покрутить:
Проверьте что для Output моторов выставлена частота нужная для ваших регулей, обычно 400Hz (Output update speed).
{"assets_hash":"a8b26fa7f6e768b07a72c8c9aadb9422","page_data":{"users":{"4c0957443df9550077760211":{"_id":"4c0957443df9550077760211","hid":67065,"name":"Shuricus","nick":"Shuricus","avatar_id":null,"css":""},"4ca591823df955007775be37":{"_id":"4ca591823df955007775be37","hid":72564,"name":"ARXITEKTOR","nick":"ARXITEKTOR","avatar_id":null,"css":""},"4d2ed4283df9550077757835":{"_id":"4d2ed4283df9550077757835","hid":78182,"name":"Covax","nick":"Covax","avatar_id":null,"css":""},"4f4251153df9550077747e58":{"_id":"4f4251153df9550077747e58","hid":114568,"name":"Danuvas","nick":"Danuvas","avatar_id":null,"css":""},"500d6e613df9550077741ced":{"_id":"500d6e613df9550077741ced","hid":122779,"name":"brusse","nick":"brusse","avatar_id":null,"css":""},"5354dfe73df9550077729f6a":{"_id":"5354dfe73df9550077729f6a","hid":200387,"name":"Mytyshy","nick":"Mytyshy","avatar_id":null,"css":""},"5381ef253df9550077728c99":{"_id":"5381ef253df9550077728c99","hid":202191,"name":"CrazyCoder","nick":"CrazyCoder","avatar_id":null,"css":""},"53ce97633df95500777271ca":{"_id":"53ce97633df95500777271ca","hid":205264,"name":"Denis_S","nick":"Denis_S","avatar_id":null,"css":""}},"settings":{"can_see_ip":false,"can_report_abuse":false,"can_see_hellbanned":false,"forum_can_view":true,"forum_can_reply":false,"forum_edit_max_time":30,"forum_can_close_topic":false,"forum_show_ignored":false,"forum_mod_can_delete_topics":false,"forum_mod_can_hard_delete_topics":false,"forum_mod_can_see_hard_deleted_topics":false,"forum_mod_can_edit_posts":false,"forum_mod_can_pin_topic":false,"forum_mod_can_edit_titles":false,"forum_mod_can_close_topic":false,"can_vote":false,"forum_mod_can_add_infractions":false,"forum_topic_title_min_length":10,"forum_reply_old_post_threshold":30,"votes_add_max_time":168,"forum_show_post_interval":7,"can_see_deleted_users":false},"section":{"_id":"61c9a54c3df9550077bb5207","hid":136,"title":"Мини и гоночные коптеры до 300мм","parent":"61c9a54c3df9550077bb51fe","description":"","is_category":false,"is_votable":true,"is_writable":true,"cache":{"topic_count":265,"post_count":107629,"last_post":"66d6a0aa3627b35af438344c","last_topic":"66cc53c4563b07d603eeab5d","last_topic_hid":572531,"last_topic_title":"Квадрокоптер Walkera Rodeo 150 биндинг приемника","last_ts":"2024-09-03T05:37:46.223Z","last_user":"491ea1623df95500777757b6"}},"topic":{"_id":"535b5ad13df95500770755c9","hid":362347,"title":"FPV миникоптеры на 250х рамах (ZMR, Blackout, QAV250 и т.п.)","views_count":3930656,"last_post_counter":51223,"cache":{"post_count":50000,"first_post":"535b5ad13df95500770759e3","first_ts":"2014-04-26T07:05:53.000Z","first_user":"4ad8f0863df9550077768ed1","last_post":"6405b40dc68e4ffcbc183a99","last_post_hid":51223,"last_ts":"2023-03-06T09:36:13.605Z","last_user":"41dd37293df95500777929a4"},"st":1,"section":"61c9a54c3df9550077bb5207"},"subscription":null,"pagination":{"total":50000,"per_page":25,"chunk_offset":1840},"posts_list_before_post":["paginator","datediff"]},"locale":"en-US","user_id":"000000000000000000000000","user_hid":0,"user_name":"","user_nick":"","user_avatar":null,"is_member":false,"settings":{"can_access_acp":false,"can_use_dialogs":false,"hide_heavy_content":false},"unread_dialogs":false,"footer":{"rules":{"to":"common.rules"},"contacts":{"to":"rco-nodeca.contacts"}},"navbar":{"tracker":{"to":"users.tracker","autoselect":false,"priority":10},"forum":{"to":"forum.index"},"blogs":{"to":"blogs.index"},"clubs":{"to":"clubs.index"},"market":{"to":"market.index.buy"}},"recaptcha":{"public_key":"6LcyTs0dAAAAADW_1wxPfl0IHuXxBG7vMSSX26Z4"},"layout":"common.layout"}