FPV миникоптеры на 250х рамах (ZMR, Blackout, QAV250 и т.п.)

А почему? Один полетный режим, настройка PID методом тыка, без крутилочек )))) Только хардкор!
Ну для хардкора наверное самое оно. Но проще все же подключить по одному проводу.
как раз собирался заказать FrSky D4R-II, но после этих постов:
rcopen.com/forum/f136/topic362347/17959
rcopen.com/forum/f136/topic362347/17974
Сейчас уже нет смысла брать D4R приемники, лучше покупать X4R-SB.
решил брать FrSky X4R-SB
единственное что смущает: rcopen.com/blogs/207685/19999
FrSky X4RSB показал себя очень плохо дальность максимум 150-200 метров (причем не у меня одного) был заменен на FrSky D4R-II
что вы думаете по поводу проблем с дальностью у X4R-SB?
лучше покупать X4R-SB
А S.BUS от этого приемника инвертировать надо?
решил брать FrSky X4R-SB
А они где-нибудь ещё кроме банггуда бывают?
Прошу совета,
настроил PID (3) (P=3.4, I=55, D=30) - и вроде бы стало более-менее хорошо, никогда не пробовал летать на чем-то другом поэтому сложно сказать далеко ли эти настройки от “идеала” (FPVModel 2204 2300, 3S, Naze32+, Props 5030).
Вопросов еще много, но самый главный, который реально напрягает - при ACRO снижении квадр заваливается назад, видимо батарея (на втором этаже и смещена назад, т.к. нет возможности ее в середину запихнуть) перевешивает. При полете это не чувствуется (скажет так, почти не чувствуется), а при снижении, когда двигатели почти на минимуме квадр не ловит этот момент, ловлю вручную - но это не очень хорошо по ряду причин…
Посоветуете чего-либо для решения данной проблемы? При настройках “Горизонт” (стабилизация) такого не наблюдается…
PS. Словил чудесную штуку - во время полета по неизвестным мне причинам отказал видеопередатчик - попытался по памяти удержать высоту и сместиться в сторону (в надежде, что это “тень”) - но видео не восстановилось и в результате квадр (как оказалось по видео записи) ушел вбок и со всей ярости (скорость приятная была) вошел в утромбованную землю… Я уж думал все, привет всему… А вот оказалось рама с myrcmart весьма так неплоха - обошлось без “переломов”.
Но даже липучка на аккумуляторе и раме, и липучка вдоль аккумулятора не справились - аккум все-таки вышиб видеорегистратор с рамы, порвав 3 стяжки. Ну и отдам должное - Runcam HD - несмотря на то, что его так хорошо пнули, улетев на асфальт, попав под колеса тележки - выжил.
Подскажите, какие сейчас основные тенденции на квадрах 250 класса?
Чего ставят в плане моторов и регулей?
Ставят ли выкосы под моторы, пан-тилт на камеру?
С прошлого года лежит ZMR250, моторы 1806, пропы 6х2, в этом году летал только на большом, а сейчас опять потянуло на быстрые полёты.
Хочу слегка проапгрейдится.
что вы думаете по поводу проблем с дальностью у X4R-SB?
У X4R дальность хорошая, точно не хуже D4R. Косяк может быть с телеметрией и расположением антенн.
А они где-нибудь ещё кроме банггуда бывают?
Много где.
Например: www.readymaderc.com/store/
Если пошла речь о задержках, то спрошу о задержке при подключении поканально (pwm). Какая задержка будет у тех же d4r2 и x4rsb?
C PWM будет то же самое чо и с CPPM.
что вы думаете по поводу проблем с дальностью у X4R-SB?
Статистика пока не показательная, плохих отзывов мало. Возможно, брак какой-то партии.
Подскажите как разумнее всего организовать питание. Есть такая PDB, надо запитать контроллер (CC3D), видео-передатчик (7.4-16V), камеру (12V) и подсветку (12V). Что напрямую с батареи (3S), а что через PDB? Надо ли убирать “плюсовой” контакт сигнального провода на регуляторах? Если да, то на скольки?
А S.BUS от этого приемника инвертировать надо?
Там есть очень простой хак чтобы не инвертировать, всего один пин откусить и припаять проводок от пина к площадке рядом.
В приемнике x4rsb вместо стандартных rx tx для телеметрии используется s-port, имеет ли он значительные отличия и сможет ли naze32 с cleannflight передавать на него телеметрию по протоколу frsky?
Cleanflight поддерживает SmartPort телеметрию: github.com/hydra/cleanflight/blob/…/Telemetry.md .
Эта команда никак не влияет на лаг CPPM, через консоль нельзя уменьшить количество сэмплов, есть параметр в конфиге: github.com/cleanflight/clean...in/rx/rx.c#L76 .
Немного покопался в коде. “Изобретение” растет из мультивия. В АПМ подобного не нашел, надо будет еще глянуть в Openpilot.
Если считать что задержка приема PPM ~22мс, то при изменении в канале, мозги осознают четверть этого изменения через 22мс, половину через 44, три четверти через 66 и наконец финальное значение будет получено только через 88мс. То есть все управление немного, как бы, сглаживается.
Имхо, это пипец. Я использую s.bus и даже не знал про такие приколы…
Интересно,сколько там еще таких “находок”.
Подскажите, какие сейчас основные тенденции на квадрах 250 класса?
Чего ставят в плане моторов и регулей?
Cobra 2204-2300kv/5045
Cobra 2204-1960kv/6045
(или более бюджетные аналоги).
Еще T-Motor 2205-2000kv из недорогих (брать осторожно, были отзывы о браке).
RCX 2205 для желающих проверить новые моторы на себе.
2206 (Cobra, RCX, T-Motor) на более тяжелые и мощные сетапы.
Чего ставят в плане моторов и регулей?
SN20A/BL20A самые ходовые. RG20A покруче. KISS для экстремалов.
Ставят ли выкосы под моторы, пан-тилт на камеру?
Тилт с сервой на камеру не ставят. С тилтом под моторы мнения расходятся. Кто-то ставит, кто-то не ставит и сильнее наклоняет камеру.
Например: www.readymaderc.com/store/
Там дороже выходит, чем на банггуде. А на банггуде уже все раскупили… Впрочем, если кто-то будет к инвертеру подпаиваться, можно взять и x4r, там тоже есть sbus: boltrc.com/blog/x4r-sbus-mod-how-to/
Подскажите как разумнее всего организовать питание. Есть такая PDB, надо запитать контроллер (CC3D), видео-передатчик (7.4-16V), камеру (12V) и подсветку (12V). Что напрямую с батареи (3S), а что через PDB? Надо ли убирать “плюсовой” контакт сигнального провода на регуляторах? Если да, то на скольки?
У этой PDB по току много не навешаешь. Приемник+контроллер - на 5В бек. А вот на 12В встала только камера. Видео передатчик пришлось включать на прямую, благо он до 20В. В итоге все хорошо работает на 3S и 4S. Диоды пока не ставил, но думаю должны 4S выдержать.
А с регулей все “плюсовые” контакты удалять?
Помогите советом. Naze32 не хочет прошиваться. Порт через Hercules открывается, а от бутлоадера никаких признаков жизни. Хотя в режим прошивки входит и с Hercules и замыкая контакты на плате. Это STM32 умерла или все же CP2102?
А с регулей все “плюсовые” контакты удалять?
если от бека с PDB питать контроллер+приемник, то конечно
у меня регули без беков
Hercules
А что это?
Если все нормально Назе32 прошивается из клинфлая…
Вот это видео может поможет
Надо запитать контроллер (CC3D), видео-передатчик (7.4-16V), камеру (12V) и подсветку (12V). Что напрямую с батареи (3S), а что через PDB
ОСД нет, которой тоже 5в надо и которая достаточно прожорлива?
Я бы рекомендовал вообще не использовать подобную PDB, шумная она и нет подстроичников. Намучился в свое время, потребителей на 0.35А, было достаточно чтобы напряжение проседало с 5 до 4.5в, если для всей электроники этого хватало то ОСД выключалась.
Камера и vtx какие, есть ли у vtx бэк на 5в для питания камеры?
Да, про ОСД забыл. Она есть, хоббикинговская. Камера и видео-передатчик.
други, вопрос, купил на ХК сразу два бека на 5 вольт - они зараза огромные какие-то, никуда не лезут, есть что то покомпактней в виде отдельной платки ?
други, вопрос, купил на ХК сразу два бека на 5 вольт - они зараза огромные какие-то, никуда не лезут, есть что то покомпактней в виде отдельной платки ?
други, вопрос, купил на ХК сразу два бека на 5 вольт - они зараза огромные какие-то, никуда не лезут, есть что то покомпактней в виде отдельной платки ?
А что это?
Если все нормально Назе32 прошивается из клинфлая…
Все не нормально, по этому уже и дошел до геркулеса
Все не нормально, по этому уже и дошел до геркулеса
Уже прочитал про Геркулеса.
Приехали чудо китайские 600mW передатчики на 5.8 с банггуда за $26, померил 3 штуки:

Сразу после включения 900-1000mW. Через пару минут без охлаждения падает до 750-800mW. От канала мощность тоже зависит, но ниже 650 не выдает!
Греются терпимо, 75 градусов через несколько минут работы, при этом выдает 750mW. С охлаждением на коптере должно быть еще лучше.
Про этот передатчик здесь уже писали (с ценой $17), но банггуд все перепутал и за $17 оказался лот с приемником (перепутали фотографии в лотах приемника и передатчика).
Сейчас уже все исправили, но если вы заказывали лот за $17, думая что это передатчик, то получите приемник. К чести банггуда, мне предложили вернуть деньги за 3 приемника или выслать 3 передатчика вместо приемников (без возврата приемников, теперь не знаю куда их девать).
Осталось поставить на коптер и посмотреть как он себя покажет в реальных условиях и будут ли помехи.
Для сравнения, мощность 600mW TS5828 после 2 минут работы:
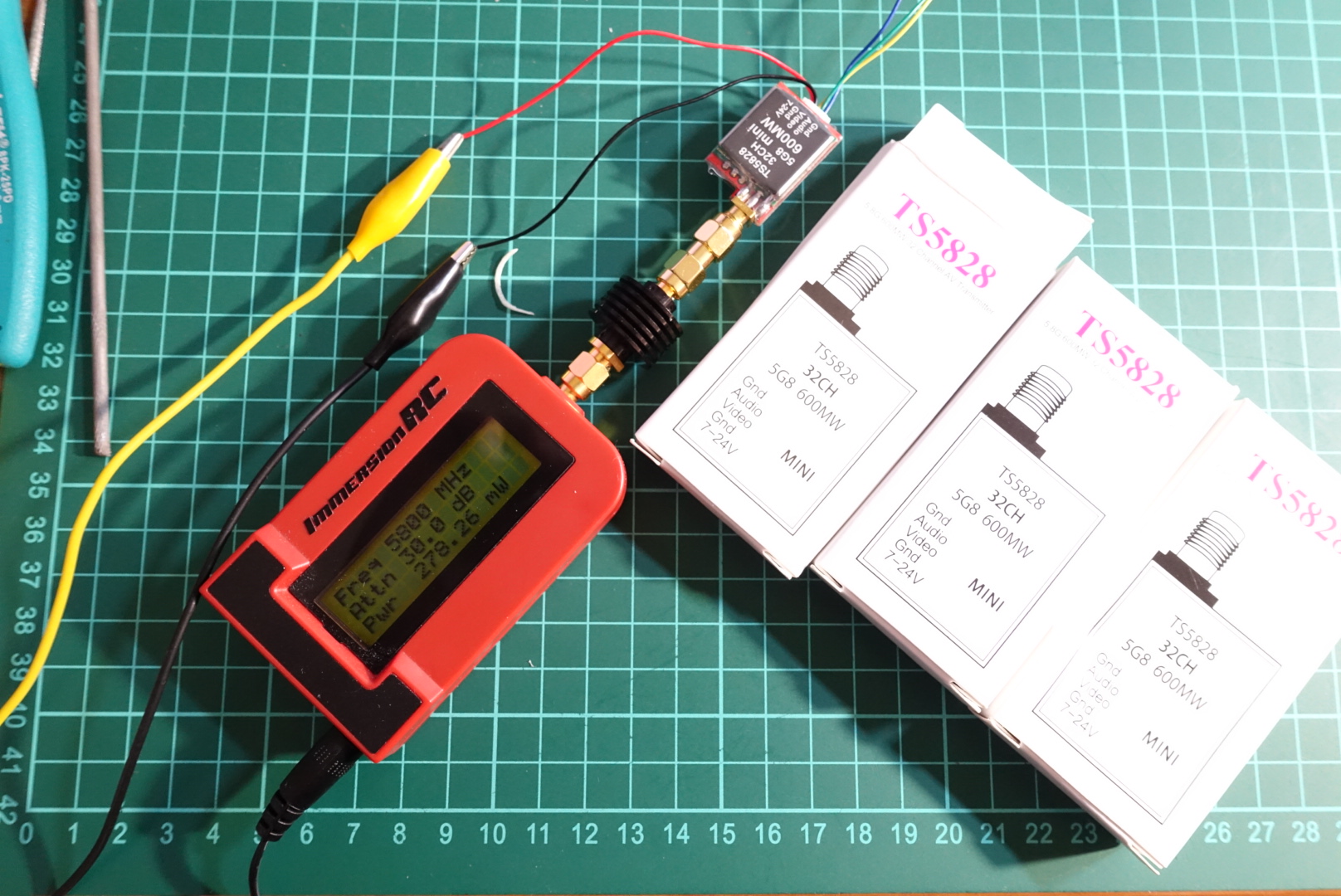
Это один из самых слабых каналов, на самом лучшем можно получить около 500mW. Делайте выводы.