Прошивки CleanFlight/BetaFlight для полетников

Прочитал тему и не нашел ответа на свой вопрос, подскажите, пожалуйста.
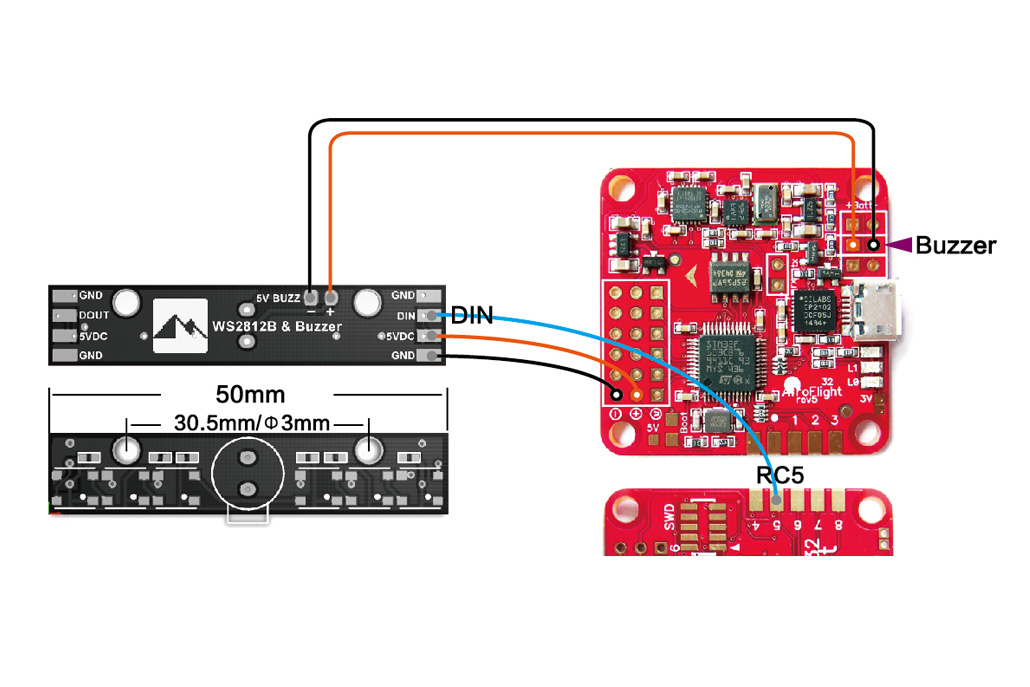
Имеется наза32 (вер.6) + приемник D4R-II подключенный к назе по PPM. Вопрос следующий - как подключить к назе вот эту пищалку fpvmodel.com/matek-3-in-1-battery-monitor-discover… , чтобы она включалась с тумблера?
- Там где двойная фишка + и - взял с акка
- Там где тройная + и - взял с 5в от видеопередатчика fx795t, а сигнальный с пина назы + VBat
- в CleanFlight (прошивка последняя от Бориса) выставил включения Buzzer’a с тумблера.
Проблема в том, что пищалка не работает! Наза на тумблер реагирует (тумблер включаешь - наза начинает моргать диодами), а пищалка молчит! Такое ощущение, как будто сигнальный провод не подключен.
На втором коптере тоже CF c прошивкой от Борис, наза32 (вер.6) и D4R-II по РРМ. Разница только в том, что на этом коптере к назе подключена обычная пищалка. Подключена к + и - пинам на разъеме VBat. С тумблера все работает.
Может я что-то не так делаю?
закоротив контакты на плате.
Я прошился не коротя контакты
Так вроде ж дефолтные пиды. Взлетит!
Очень дёргается, не стал взлетать выше полуметра. Надо просто Р уменьшить или пид контроллер сменить на другой?
Очень дёргается, не стал взлетать выше полуметра
“Дергаться” можно по-разному. Если это осцилляции, то в зависимости от их частоты нужно грешить или на P, или на I составляющую. Попробуйте P понизить раза в два и посмотреть на поведение. А вообще в BF есть GTUNE, на CC3D правда пляски нужны, чтобы прошивку с поддержкой этой фичи получить.
Проблема в том, что пищалка не работает!
Насколько я понимаю, все пищалки с Y-кабелем начинают работать сами по прошествии некоторого времени, если сигнал в канале не меняется. Причем сигнал должен быть обычным PWM, с oneshot не прокатит.
Если PIDы не правильные, то смена пидконтроллера не поможет. Хорошо летают что 1й, что 2й. Да и харакири хорошо летает, только непопулярен.
Насколько я понимаю, все пищалки с Y-кабелем начинают работать сами по прошествии некоторого времени, если сигнал в канале не меняется. Причем сигнал должен быть обычным PWM, с oneshot не прокатит.
Если PIDы не правильные, то смена пидконтроллера не поможет. Хорошо летают что 1й, что 2й. Да и харакири хорошо летает, только непопулярен.
Не совсем понял, что ты имел в виду.
Харакири имеет смысл) но это точно не для новичка - флипы идут в 3-4 раза быстрее, чем на 0м контроллере.
вот мой пример (сорри за качество видео)
Это не просто пищалка. Это мониторинг разряда батареи и + поисковое устройство.
Пищать она начинает, если просел акк, или же если на вход не подаётся PPM сигнал, который тройником берётся с одного из каналов. например с газа.
Для того чтобы на назе пищалка работала с тумблера, надо подключить пищалку с генератором, прямо к контактам buzzer
Это не просто пищалка. Это мониторинг разряда батареи и + поисковое устройство.
Пищать она начинает, если просел акк, или же если на вход не подаётся PPM сигнал, который тройником берётся с одного из каналов. например с газа.Для того чтобы на назе пищалка работала с тумблера, надо подключить пищалку с генератором, прямо к контактам buzzer
На этой пищалке 3 контакта: +, -, сигнальный.
На назе 2 контакта под buzzer: + и -.
Если подключать + к +, - к -, то не работает. Если подключить +к+, -к сигнальному, то опять же не работает.
Откуда можно взять с назы сигнальный провод, если приемник подключен по ррм?
На назе 2 контакта под buzzer: + и -.
Для понимания видео, владеть английским не обязательно.
На этой пищалке 3 контакта: +, -, сигнальный. На назе 2 контакта под buzzer: + и -. Если подключать + к +, - к -, то не работает. Если подключить +к+, -к сигнальному, то опять же не работает.
На этой пищалке якобы есть три режима писка. Второй (F2) типа можно включить писк с тумблера. Третий (F3) включится сам, когда не будет изменения сигнала в канале в течение одной минуты. Эти режимы противоречат друг другу в определенной степени.
Напрямую вашу пищалку подключить у контактам буззера на Назе32 нельзя. Это же логично и элементарно. К Назе32 подключается неумный буззер без платы. Если вы из своей платы выпаяете пищалку, вот тогда сможете подключить буззер напрямую к Назе32.
Если вы из своей платы выпаяете пищалку, вот тогда сможете подключить буззер напрямую к Назе32.
И то не факт!
В этой пищалке может не быть генератора!
Это да. Забыл этот нюанс.
Подскажите, есть контроллер dodo и naze32. И там и там стоит betaflight последний.
Вроде как видел, что на dodo можно looptime поставить меньше 1000.
Смотрю в dump нету там looptime, делаю set looptime=1000 говорит нет такой переменной.
В конфигураторе, на вкладке Configuration есть looptime, изменяю, жму save, контроллер перезагружается стоит старое значение.
Что я делаю не так? )
ЗЫ. Пид контроллер 2
Больше не нужен этот параметр. Теперь цикл синхронизируется с чем-то там и составляет порядка 1000. Смотрите в конфигураторе внизу в строке пишет текущий луптайм.
Спасибо.
Наверно с гироскопом синхронизируется.
А что нибудь слышно про разгон i2c шины по которой гироскоп подключен? Где то встречал про это, сейчас найти не могу.
Для прошивки подойдёт CC3D CP2102 USB To TTL
или нужен ?
Кто нибудь, кто в инглише силён, может рассказать что он в этом видео объясняет. Я так понял он предлагает наклон контроллера прописать при его ровном расположении , чтобы ролл по оси был при полном газе , а не овал?
Или в чем смысл его видео ?
Включил gtune, полетал, полетал, упал, выключил gtune, снова включил как в видео - ничего не поменялось в пидах. Как пользоваться то правильно?
Для прошивки подойдёт CC3D CP2102 USB To TTL
Подойдет. Этих микросхем довольно много, функционал одинаковый.
Я так понял он предлагает наклон контроллера прописать при его ровном расположении , чтобы ролл по оси был при полном газе , а не овал?
Что-то типа того. Только вот угол всегда разный в полете. Имхо фигня какая-то.
Включил gtune, полетал, полетал, упал, выключил gtune, снова включил как в видео - ничего не поменялось в пидах. Как пользоваться то правильно?
Взлететь, включить, полетать, приземлиться, дизармнуть, подключить к компу и посмотреть на ПИДы. А вообще без компа надо после посадки дизармнуть, а уже после этого передернуть тумблер GTUNE.
Или в чем смысл его видео ?
Утверждает что полетный контроллер всегда нужно ориентировать в одной плоскости с двигателями ( получается что это нужно делать даже тогда когда есть проставки под моторы). Та рама которая стоит на уже пустой рюмке я понял сделана с бодуна 😃
А что нибудь слышно про разгон i2c шины по которой гироскоп подключен?
Это одна из головных болей Бориса, он проводит подобные эксперименты, измеряет при этом нагрузку на проц итд Я сильно не вникал, сделал для себя один вывод, контроллер нужно покупать F3, имея ввиду уже F4. Если владеете английским это нужно идти на форум RCG и читать постинги автора прошивки, там он иногда поднимает эту тему.
Включил gtune, полетал, полетал, упал, выключил gtune, снова включил как в видео - ничего не поменялось в пидах. Как пользоваться то правильно?
PID1, рейт, GTune, посадка, дизарм, отключить Gtune, включить ( происходит запись новых параметров), выключить. Готово. Что из этого было не так ?
PID1, рейт, GTune, посадка, дизарм, отключить Gtune, включить ( происходит запись новых параметров), выключить. Готово. Что из этого было не так ?
Ну я второй номер пидов пытаюсь настроить и в стабилизации, взлетаю, включаю тюн, летаю, сажаю, дизарм, отключил тюн, включил тюн, выдернул питание. И ничего опять не произошло. Я думал в стабилизации надо настраивать)