Прошивки CleanFlight/BetaFlight для полетников

Естественно при выключенном моторстопе при стике газа в нуле движки вращаются на том проценте который выставлен в конфигураторе и останавливаются окончательно только при дизарме, но при стике газа в нуле тяга минимальная, дальше по рекомендации Pasta. Просто в аирмоде коптер при приближении к поверхности начинает ловить отраженную струю воздуха, от этого и прыжки, рецепт один - научиться сажать как описал Pasta/
Если я правильно понял, то делаете дизарм тумблером, квадрик все ещё летит
да , совершенно верно!дизармлю, квадрик управляется как угодно(можно продолжать летать,если передумал садиться-тумблер в положение арм-летаем дальше) до положения стика газа в ноль. действительно старая прошивка, какая не помню,не любитель зря прошиваться)) 3.14 вроде если такая была.
в конфиге нужно убрать все галочки -мотор стоп и еще там есть каие-то пункты
Команда называлась
set disarm_kill_switch = OFF
все делается в конфиге , можно без команд в CLI
если передумал садиться-тумблер в положение арм-летаем дальше) до положения стика газа в ноль. действительно старая прошивка, какая не помню,не любитель зря прошиваться)) 3.14 вроде если такая была.
Самые ранние прошивки бетафлай которые вижу на гитхабе, это 3.2.0.
Посмотрите, пожалуйста, точнее Вашу прошивку.
Самые ранние прошивки бетафлай которые вижу на гитхабе, это 3.2.0.
Посмотрите, пожалуйста, точнее Вашу прошивку.
зависит от ПК не на каждый ПК есть старые прошивки бетафлая.
а хотя посмотрел . да действительно убрали старые прошивки
Посмотрите, пожалуйста, точнее Вашу прошивку.
посмотрел,прошивка 3.17
Но начиная с версии 3.3 в Betaflight намеренно убрали эту настройку в целях безопасности.
ну нафиг такую безопасность))) не буду прошиваться!!!)))
Окно D_MIN лля настроек есть только в конфигураторе 1.0.5.0, последняя версия конфигуратора напомню здесь
ci.betaflight.tech/job/BetaFlight_Configurator/ Кто то уже пробовал новую фичу в полете ?
Ребята, привет.
а есть у кого работающая связка omnibus f4 corner + xsr-e c телеметрией?
Хочу завести телеметрию, пробую по мануалу с рцгруппс
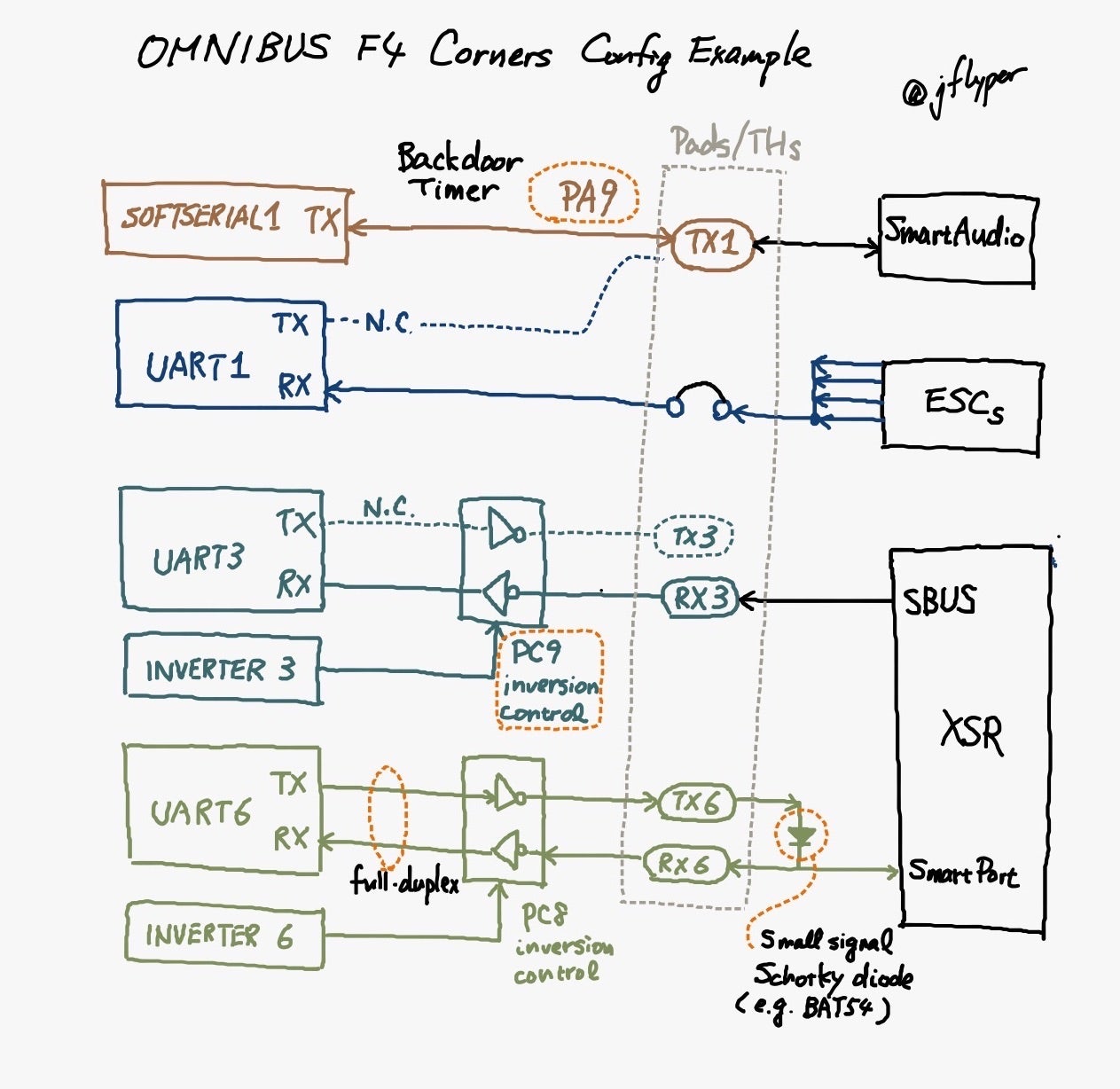
припаял диод между tx6 rx6, sport на rx6, sbus на rx3
в кли ввел по той же инструкции:
resource INVERTER 3 C09
feature TELEMETRY
set serialrx_provider = SBUS
set tlm_halfduplex = OFF
пробую армить, и поиск новых сенсоров в таранисе, но ничего не нашел, кроме
RSSI, Rx vbat (5v) и A2 (6.8v странное значение, что это? )
Прошивка бетафлайт 3.5.7
После посадки, на земле моторы работают, пока не выключишь АирМод. Т.е. режим в принципе фунциклирует.
Работа моторов ни как не связана с ЭйрМодом, точнее совершенно не говорит о работе функции.
У меня тоже моторы работают на земле, просто мотор стоп выключен. А ЭйрМодом не пользуюсь.
А прыжки около земли связаны с усиленной стабилизацией на малом газу. Коптер у земли в сильных завихрениях находится, естественно его колбасит, а эйрмод пытается это все компенсировать, но не удачно.
В общем или мягкая посадка или эйрмод.
В общем или мягкая посадка или эйрмод.
Ну или как все, дизарм перед касанием . Если летать в поле лучше плюхнуться на коврик, чем моститься в облаке пыли да еще траву намотать на пропы. Но это я так решил, каждый волен выбирать свой способ, помниться раньше пробовали садиться на ладонь, а потом дизарм. Мы это уже проходили.
Вроде нашли причину (etracer- разработчик бетафлая ) почему происходил затык ESC в связке с полетником при использовании bdir, что приводило к падению квадриков, выложили новую пофиксенную прошивку
github.com/joelucid/jflight
Совет разработчика bdir
I still recommend 4K/600 for f4 and as starting point on f7. But 8k/600 should now work on f7. And 1200 too if you have good wiring.
И обнадеживают что все же после ходовых испытаний появится прошивка на ESC которые S
4K/600
это что?
это что?
Это рекомендация с чего начать тестировать новую прошивку, в настройках начинать с 4К и Dshot 600 Там проблема была в прекращении работы ESC связанная с тем что еще не закончилась передача телеметрии, а уже начиналась передача данных с полетника на ESC , то есть сигналы шли в лоб и все захлебывалось, в чем проблема обнаружил кодер бетафлая. Там все меряется фреймами, длительностью пауз итд Рекомендуется начать с частоты пониже, а те кто пользуется дшот1200 где все сжато во времени рекомендуется иметь хорошую пайку сигнального провода ( может на воду дуют ). Автор bdir пишет что на сегодня пока хватит квадриков падающих с неба, мол разберемся окончательно и только после этого будут делать прошивку на ESC S Вроде далжно все работать, но просят не гнать. Там подключили человека который пишет прошивку на ESC должна выйти версия с фиксами. Есть надежда что проблема решена. Ну и что то народ молчит про D_MIN я выше спрашивал или всем без разницы ? 😃 D_MIN должна быть теоретически отличная штука, она позволяет увеличить P на 10-15 процентов и квадрик должен отлично рулить как на резких маневрах, так и при плавных полетах.
D_MIN задумана для того чтобы ограничить параметр D в прямолинейном полете и задирать его до заданных максимальных при резких маневрах. Если выставить все нули, это не работает. А если выставить например 22 то в прямолинейном полете D уменьшается до этого значения, но при резкой даче стиков пид по D динамически задирается например чтобы загасить пропвош, также в настройках есть параметр как должна работать эта опция, например только после раскрутки моторов или сразу при движении стиков ( d_min_gain ) и настройка как вы будите чувствовать стики ( Advance ). Это коротко.

Подскажите как посмотреть причину дизарма. Делаю арм, моторы крутятся около секунды-двух и останавливаются. Одиночный короткий бип. Можно опять армить, но эффект тот же. Бетафлай 3.5.7 на Матек722. Регули DYS32 Aria Dshot1200. Приемник flysky через iBus.
Подскажите как посмотреть причину дизарма.
CLI -> status
Кто пробует новые rpm bidir фильтры новая исправленная прошивка с фиксами
Here are the new jflight binaries off of rc3 with interpolated ff, dshot collision avoidance and the abs control fix.
CLI -> status
Армлю-моторы крутятся-останавливаются через секунду-бип. Подключаю BF, cli status:
I2C Errors: 3, config size: 2550, max available config: 16384
armingflags CLI MSP
Флаги, я так понимаю, это юсб соединение.
А что может быть не так с L2c? У меня еще ничего не задействовано, кроме ibus от flysky и регулей через pdb.
Менять приемник? даунгрейдить прошивку?
А что может быть не так с L2c?
Куда приемник подключен? Скорее всего прицепили приемник на порт с ресурсами I2C.
И CLI -> resource давайте, лучше в теге # (по кнопке “ответить в теме”)
BLHeli_32 Test code Rev32.6.8 hex files выложена день назад
github.com/…/BLHeli_32 Test code Rev32.6.8 hex fil…
О прошивке на ESC, ее оптимизирует создатель как я читал под новые фильтры. Уже летают на ней, писали что исследовали как подается напряжение на моторы и поняли что при подаче излишнего напряжения как сейчас было реализовано в прошивке моторы раскручиваются не так эффективно, батарея расходуется впустую. Вроде как цель новой прошивки сделать так чтобы напряжение подавалось по оптимизированной кривой, это увеличивает стабильность и увеличивает полетное время из за уменьшения неэффективных расходов батареи.
исследовали как подается напряжение на моторы и поняли что при подаче излишнего напряжения как сейчас было реализовано в прошивке моторы раскручиваются не так эффективно
прям Америку открывают, это часть того, о чём писал ранее тут, мало того для каждого мотора есть свои эффективные обороты.
Разрабы хоть бы инфу в инете покурили, её полно, даже тут человек на форуме моторы перематывает (правда не для дронов) , тут с графиками видно зависимомость, также на англоязычных сайтах полно этой инфы.
Чтож у каждого свой путь, подождём пока сделают, доведут до ума.
Согласен, просто то о чем все знали и говорили автор ESC прошивки реализовал. Дождемся версии 4.1 где это обещают будет работать.
PS там сейчас нужно руками прописывать настройки snippet , причем есть методика, если ее не соблюдать будут проблемы. Методика это простой порядок, вот он
in a single CLI session:
timers first
dma second
no save/reboot in between
Думаю позже все это будет на автомате и появится настройки графические (GUI ) в конфигураторе.
В новом конфигураторе в ОСД приделали параметр максимальной перегрузки, после полета на видео у автора ролика показало 7,1 едениц G Я думал при такой тяговооруженности перегрузка еще больше.