Eachine 250 - гоночный FPV коптер

Пищалка какая?
да я выпаял динамик из тестера напряжение 
Еще проблема нарисовалась как штатную подсветку Racer 250 включать, по PWM просто на отдельный канал подключал,а теперь даже если шестой сигнальный провод выдерну с полетного контроллера и подключу на подсветку, в настройках Клинфлайта как обозначить чтобы тем или иным тумблером включать свет. Вынос мозга прям.
З.Ы. Заработал буззер по совету Игоря, точнее не пищит а щёлкает, видимо потому что это просто динамик
Вот как раз и ошибка. В этом девайсе обычный пьезодинамик неактивный и он пищать не будет 😦 ему генератор писка нужен.
Вот как раз и ошибка. В этом девайсе обычный пьезодинамик неактивный и он пищать не будет ему генератор писка нужен.
Да я уже понял, напряжение на него по совету Павла подал(( Ладно, с этим разберусь тогда. Со светом теперь бы разобраться:(
Со светом теперь бы разобраться
Да зачем это? В пищалке необходимость жизненная, если бы не она я бы коптер потерял уже не раз в сугробах, и она должна включаться с тумблера, или, на дизарм. Свет тебе зачем? Вот, за те пять минут, пока коптер летает, неожиданно вдруг стемнело, а не включить ли мне фары… какова вероятность этого? А больше зачем? Перед самочками понтоваться так возраст вроде уже, да и не оценят они по достоинству трудов праведных 😉 Все равно, максимум 10 минут полета, и коптер у тебя в руках. Нужен свет - включи на следующие 10 минут. А то это больше похоже на «есть 10 каналов, и я во что бы то ни стало задействую их ВСЕ»
Лучше разберись как на отдельные каналы ПИДы вывести, чтобы с аппы настраивать было удобно. Мозг сменишь - коптер не полетит как из коробки.
Павел, опять убедили))))))))))))))))))))))))
Про свет все точно. Я тоже в начале заморачивался. Но потом тупо включил и больше не выключал, смысла нет. Когда на столе настраиваешь - выключаешь.
Про настройки ПИД в полёте настраивало все просто, нужно 2 канала - один для выбора что настраивать и второй + - (увеличить и уменьшить). Обычно на один канал крутилку ставят, на второй трехдиапазонный переключатель. Больше геморроя с аппаратурой чем с полетником. На Таранисе все переключатели трехдиапазонные, а вот на Турниге только один и приходилось из двух тумблеров мудрить.
И вот главный вопрос, а все знают или помнят что после подстройки ПИДов в полёте после приземления и дизарма нужно сохранить подобранные значения? 😃 Иначе все пропадёт после отключения питания. И для этого есть определенная комбинация стиков и при этом коптер должен ещё пикнуть что мол он все запомнил 😃
И самое главное: разберитесь что такое ПИД и как все это работает и кто за что отвечает. Что такое П что Д что И. Очень многие на форуме путают их и крутят Д пока моторы или регулятор не сгорит.
Коллеги, поздравьте, вот и я надеюсь буду полезным для форума:) Подружил я в итоге Naze32 10DOF от Рейсера с приёмником FS-IA10B 😃 В итоге 6 провод на входе надо было использовать для сигнального, помогла схема из гугла …доволен как слон:) 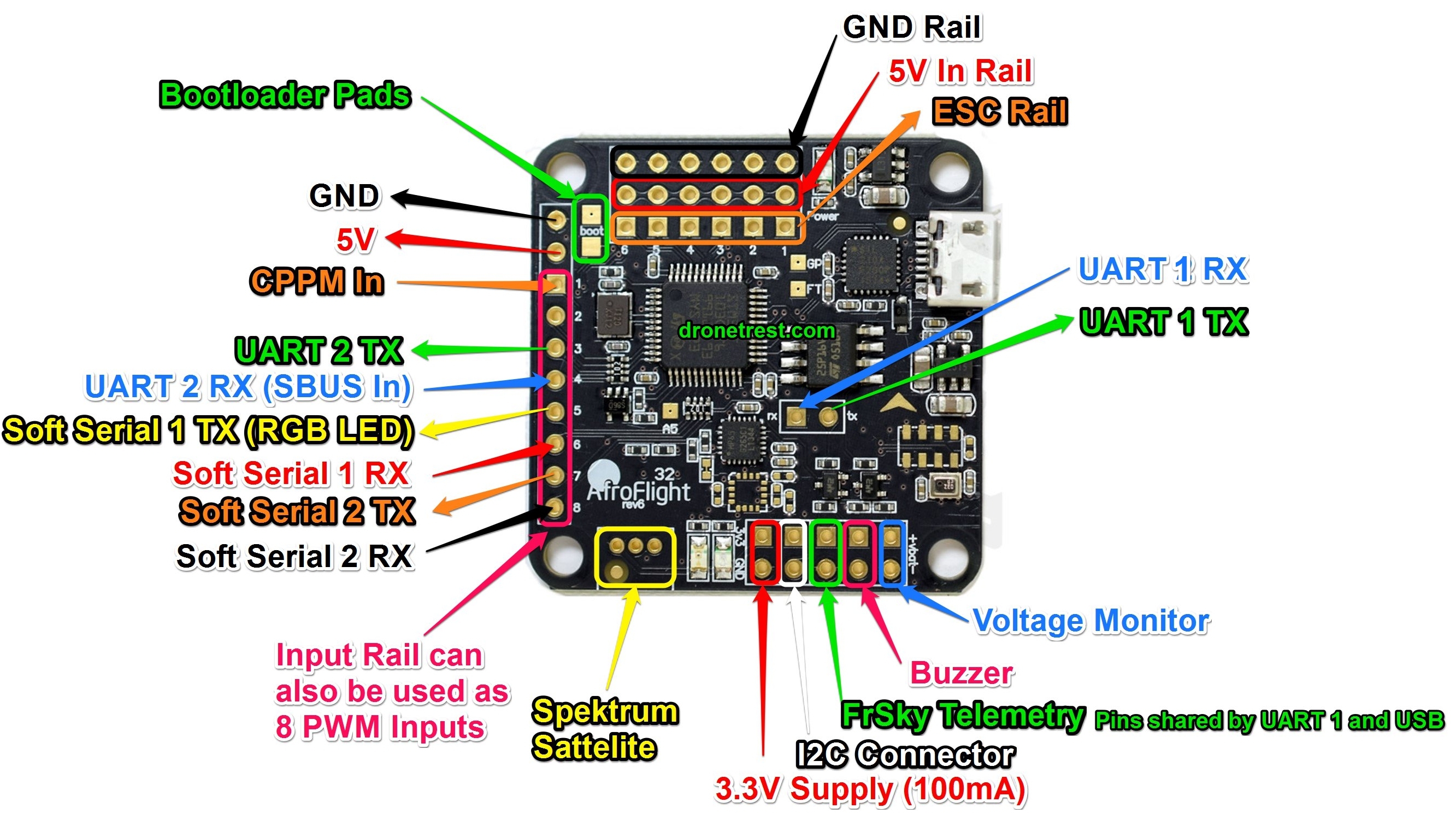
В итоге 6 провод на входе надо было использовать для сигнального
Чем она помогла-то? По ней как раз надо к 4-му подключаться, о чем я и говорил. Ишайновцы, значит, и над этим ПК поглумились?
Чем она помогла-то? По ней как раз надо к 4-му подключаться, о чем я и говорил. Ишайновцы, значит, и над этим ПК поглумились?
Я имел ввиду 6 провод по счету, а сигнальный 4
И самое главное: разберитесь что такое ПИД и как все это работает и кто за что отвечает. Что такое П что Д что И. Очень многие на форуме путают их и крутят Д пока моторы или регулятор не сгорит.
У мну такие ассоциации по этому поводу:
П - пропорция. Чем больше коптер отклонился от того “как должно быть”, тем сильнее крутятся моторы, и больше сила для выравнивания. П должен быть максимальным, но если СЛИШКОМ большой, то коптер по инерции проскочит нужное положение, попробует вернуться обратно и опять проскочит = высокочастотные колебания. Именно из-за этого нормальные регули с поддержкой активного торможения лучше стоковых, которые продолжают крутить винт по инерции, даже когда это уже во вред. П - самый важный параметр, коптер способен держаться в воздухе за счет одного его, остальные два - “пряности”, делающие полет не просто возможным, но и вкусным.
Идет человек по канату, П - это шест у него в руках. Недостаточно сильно пользоваться шестом - потеряет равновесие и упадет, махнуть излишне сильно - начнет валиться в другую сторону, и придется махать снова, а потом снова.
И - интеграл. Повторюша дядя Хрюша, который следит за движениями стиков и пытается их скопировать, и чем больше И, тем больше Хрюша подтупливает. Если дернуть стиком влево-вправо, коптер пролетит относительно ровно. И тем ровнее, чем И больше. Поэтому, если крутой фристайлер хочет, пролетая внутри опоры ЛЭП скрутить тройной флип с подвыподвертом, И ему помеха, и он уменьшает его до минимально приемлемого значения, пока дрейф не станет неприемлемым. Для новичка, путающего стики (это я), для спокойных полетов, для “поснимать” И нужно побольше, полет станет плавнее, обратная сторона - коптер постепенно становится летающей коровой и начинает совсем уж тупить. Гонщики ищут неуловимую золотую середину, каждый по своему.
Д - диференциал. Его труднее всего “наглядно” представить, я это примерно так вижу: Летишь-летишь спокойно себе на коптере, летишь-летишь, ААА! СТОЛБ!!! Резко дергаешь стики… Так вот Д по этой резкости понимает, что нужно не просто отвернуть, а отвернуть ОЧЕНЬ быстро, это скорость, с которой коптер займет правильное положение. Д - отрицательно, поэтому в интернете путаница с “увеличить-уменьшить”. Большее Д (ближе к нулю) - очень верткий коптер, может быть СЛИШКОМ вертким, и появятся медленные осцилляции. Меньшее Д - летающая корова. А еще перекручивание Д - хороший способ спалить регули и моторы 😃
П И и Д - это, собственно, коэффициенты, с которыми каждое слагаемое участвует в процессе “руления” коптером.
Еще, поскольку зависимость тяги ВМГ нелинейно зависит от тока, подаваемого на двигатель, ПИДы хорошие для малого газа могут оказаться избыточными для большого. Поэтому реализовано уменьшение коэффициентов с увеличением газа.
Параметр П в большей степени характеризует конфиг коптера, настраивается в первую голову по принципу: Максимальный, но чтобы не трясло. И и Д - больше характеризуют вкусовые предпочтения пилота и стиль полета, хотя перегибы в их изменении сделают коптер нелетабельным. Мало влияют в стабе, больше в акро. Для начала можно оставить по умолчанию, настроив только П.
Если что-то неправильно понял - прошу незамедлительно ткнуть носом 😃
Пришел новый передачик,другая распиновка,подскажите правильно ли его так подключать?И камера понизит сама напряжения до 12 или сгорит от 4s?
Пришел новый приемник,другая распиновка,подскажите правильно ли его так подключать?И камера понизит сама напряжения до 12 или сгорит от 4s?
Ну во первых это передатчик, а не приёмник, а во вторых не думаю что саму камеру можно питать напрямую от батареи, как правило для таких целей на платах питания есть отдельные выводы на 5v и 12v. Коллеги поправьте, если ошибаюсь.
е думаю что саму камеру можно питать напрямую от батареи
То что на прямую делают,я видел схемы.Но вот напряжение камеры,и батареи не указаны были.
на платах питания есть отдельные выводы на 5v и 12v
На ER250 как понимаю нижняя пластина сама PDB,вывод 5V есть,3.3 В на Cc3d есть,а вот 12В не вижу.
Я вот нашел видео с таким передачиком,вот схема,только не понимаю понижает ли камера напряжение? Или тут 3S стоит.
Под видео прочитал,у некоторых так на 4S сгорел,что логично если камера не понижает.У кого то и так летает.
Пришел новый передачик,другая распиновка,подскажите правильно ли его так подключать?И камера понизит сама напряжения до 12 или сгорит от 4s?
ну судя по вашему рисунку вместо акб питание должно идти 12в с платы распределения питания, а то перепады напряжения с регулей (которые запитанны на АКБ и скочки могут достигать 40в) просто спалят вам камеру или передатчик
Я думаю подключить так же как и родной стоял ,где надпись OSD на плате,хотя померил напряжение такое же в зависимости от акб который стоит.У кого родной видео передачик стоит,можете померить на выходе с видео передачика напряжение…с 3 и 4 банками?НА своем сгоревшем попробовал,показывает всего лишь на 0.33В меньше чем на входе,в зависимости от АКб. Т.е либо на родном видеопередачике должно выходить около 12В в не зависимости от акб,на камеру.Либо получается что на камеру приходит до 16,8В на 4s,и она нормально работает)Либо я просто что то не догоняю.
Что значит 4C1P у 4 баночного аккума? Подойдёт этот для Racer 250?
Что значит 4C1P у 4 баночного аккума? Подойдёт этот для Racer 250?
4S - four in series - четыре в серию, т.е. последовательно.
4S1P - four in series and one in parallel - четыре в серию и один в параллель, т.е. четыре по одной последовательно.
4S2P - four in series and two in parallel - четыре в серию по две в параллель. Тут получается, что две банки соединены параллельно и уже из таких ячеек последовательно собран пак.
Первые два варианта - это одно и то же.
Хорошие,смотри только по размеру чтобы подошли,если у тебя Акб внутри стоит.
Хорошие,смотри только по размеру чтобы подошли,если у тебя Акб внутри стоит.
Да по размеру то впихну, либо проставки местами поменяю чтобы увеличить зазор на полтора миллиметра, либо передатчик вниз перенесу а аккум на верх. А не критично что у него напряжение 15,2v против 14,8v у нормальных 4s , ни чего не сгорит?
У полностью заряженного 4s напряжение 16,8 (По 4,2 На банку).
15,2 это по 3,8 На банку - напряжение в режиме хранения. При таком напряжении летать нельзя.
Если летать на рейсере На 4s, особенно если поставите винты 3 лопасти, первое что у вас сгорит это ESC - там стоят всего на 12а, а на 4s эти двигатели потребляют токи 20а и больше. То есть полет будет до первой хорошей прогазовки, потом будете менять регули на более мощные.
Больше вроде ничего не горит, летает нормально.
И камера понизит сама напряжения до 12 или сгорит от 4s?
Сгорит. Питать через понижающий на 12V. На PDB 12V искать бесполезно, т.к. 12V обеспечивает штатный VTX.
Новый VTX можно запитать и от 4S напрямую - он до 24 вольт держит.
Д - диференциал. Его труднее всего “наглядно” представить, я это примерно так вижу: Летишь-летишь спокойно себе на коптере, летишь-летишь, ААА! СТОЛБ!!! Резко дергаешь стики… Так вот Д по этой резкости понимает, что нужно не просто отвернуть, а отвернуть ОЧЕНЬ быстро, это скорость, с которой коптер займет правильное положение. Д - отрицательно, поэтому в интернете путаница с “увеличить-уменьшить”. Большее Д (ближе к нулю) - очень верткий коптер, может быть СЛИШКОМ вертким, и появятся медленные осцилляции. Меньшее Д - летающая корова. А еще перекручивание Д - хороший способ спалить регули и моторы
Вот опять характерная ошибка трактовки параметра Д в ПИД регуляторе 😃
Д - компенсирует большое П. Д и П связаны между собой. И никакого отношения к тому что вы написали не имеет.
Общая формула управления: U = P*E - D*dE/dt + I*SUM(E)
где E - ошибка управления - разница между требуемым углом отклонения и реальным
dE - разница ошибки между предыдущим измерение и текущим за время dt (дифференциал)
SUM - это функция суммирования ошибки (интеграл)
P - коэффициент пропорциональной составляющей регулятора
D - коэффициент дифференциальной составляющей регулятора
I - коэффициент интегральной составляющей регулятора
U - управляющее напряжение подаваемое на мотор (привод)
Объясню Д: П - прямо зависит от ошибки. Например нам надо отклониться на 20 градусов. П = 10, то по формуле (если Д и И равны 0) сигнал на моторы будет равный U=P*20 - и это напряжение подается на мотор (условно, так как моторы у нас трехфазные и регулятор это за нас это обеспечивает). Поэтому мотор старается повернуть наш квадрик на 20 градусов как можно быстрее. Когда квадрик у нас повернется на 10 градусов то сигнал на мотор будет уже U = P*10. И так приближаясь к нужному углу управляющее напряжение падает. Но квадрик обладает инерцией и поэтому когда управляющее напряжение будет равно 0 (U = P * 0 - нет ошибки управления), то квадрик по инерции продолжит свое движение и тогда угол ошибки станет -5 градусов например и тогда управляющее напряжение будет U = P * -5 и квадрик начнет обратное движение к нужному углу. И вот как раз возникает так называемое перерегулирование (на просторах форума - осцилляции). Это возникает когда большое P. Если P маленькое то перерегулирования не будет, но время выхода на нужный угол будет большое. Для того чтобы квадрик был не “вялым” а “бодрым” нам нужно большое P, но в этом случае у нас будет перерегулирование и осцилляции. Это можно видеть на многих квадриках - когда резко изменяете угол то квадрик делает пару колебательных движений и успокаивается - это значит большое P.
Чтобы убрать осцилляции или перерегулирование решили ввести дифференциальный контур регулирования, который будет измерять скорость изменения ошибки управления (еще раз напомню что это разница между нужным углом и текущим положением квадрика) и будет уменьшать P управление когда объект будет приближаться к заданному углу. Т.е. когда у нас большое P то квадрик из-за инерции начнет медленно компенсировать ошибку, но потом наберет скорость и начнет быстро приближаться к нужному углу и вот тут в дело вступает Д компонента регулятора, чем быстрее уменьшается ошибка то больше будет Д составляющая и тем меньше будет управляющий сигнал на мотор: U = P*E - D*dE/dt - т.е. включается торможение квадрика заранее когда он приближается к нужному углу. В итоге P составляющая уменьшается за счет Д составляющей и не происходит перерегулирования - т.е. отсутсвие осцилляций. Поэтому когда нужно большое П чтобы квадрик был “бодрым” то нужно Д. Поэтому П и Д неразлучные друзья. Но при большом П все равно возникают осцилляции но их компенсирует Д, но не до конца и возникают высокочастотные осцилляции которые на глаз никогда не увидишь. Поэтому определить высокочастотные осцилляции можно по температуре моторов - если горячие (т.е. они трудились чтобы убрать перерегулирование, но П такое большое что им пришлось сильно трудиться) то нужно уменьшать Д и соотвественно уменьшать и П 😃
Теперь что такое И: вроде бы все нормально П и Д справились, но у системы есть ошибки: ошибка измерения угла, смещенный центр тяжести, разная производительность моторов и пропов. Поэтому вроде бы система справилась с ошибкой - уменьшила ее до нуля, но на самом деле есть ошибка. Поэтому вводят И составляющая котора складывает все ошибки и добавляют ее в управляющий сигнал для компенсации конструктивных особенностей системы. Вот и получается формула: U = P*E - D*dE/dt + I * SUM(E).
😃
Теперь как все это настраивается. В идеальном случае в начале убирают Д и И составляющие регулятора, т.е. делают коэффициенты Д и И равными 0 (ноль). И ставят какое то маленькое значение П (чисто имперически - практически). И начинают настройку П составляющей. Увеличивают П до тех пор пока не начнется перерегулирование (не будет осцилляций). Как только началась осцилляция, то останавливаются и начинают увеличивать Д до тех пор пока осцилляции не уйдут. Т.е. Д справилось со своей задачей и при высоком П убрала перерегулирование. Дальше снова увеличивают П, чтобы повысить скорость реакции системы, чтобы квадрик стал “бодрым” а не “вялым” и увеличивают до тех пор пока не будут осцилляций, потом увеличивают Д чтобы их убрать. И так делают до тех пор пока не будет реакции при увеличении П и Д. После того как достигли приемлемого управления, немного уменьшают значения П и Д примерно на 5%. Чтобы не было работы системы на грани устойчивости. После всего этого начинают крутить И. Вот здесь сложнее. Здесь нужно смотреть реакцию системы в дальней перспективе. Нужно смотреть как система себя ведет как она вышла на заданный угол и как долго она исправляет ошибку конструкции. Настройку И не смогу объяснить 😦 По видео которые я смотрел, говорят что И проявляется при спусках коптера. Если при спуске коптер раскачивает, то нужно увеличивать И. В принципе верно, если посмотреть на формулу то И работает на сумму ошибки управления. И если сумма ошибки есть то на нее нужно реагировать. Если коэффициент И маленький то реакция на сумму ошибки будет “вялой” если большой, то “резкой” и возможны опять колебания (осцилляции). Для меня пока И очень тяжела в настройке. Так как могут влиять внешние факторы - например порывы ветра и вся настройка И на сварку 😦
Надеюсь объяснил понятно.