вопросы по sp racing f3 & mini

Коллеги, подскажите. При подключении питания на коптер один из моторов начинает подергиватся. После арминга, симптом пропадает. В чем причина?
После арминга, симптом пропадает. В чем причина?
Не корректно откалиброваны регуляторы.
Товарищи! Объясните дураку на пальцах:
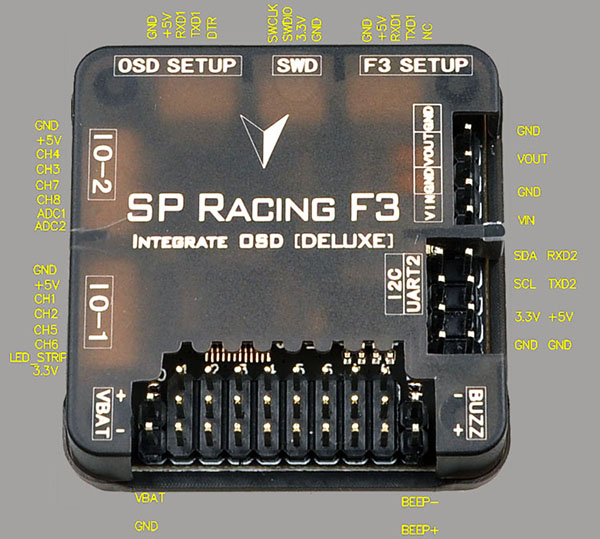
Сколько UART портов я могу задействовать в этом контроллере?
UART2 использую для GPS, а где остальные? Мне хотя бы ещё один для Bluetooth. Очень хочется воткнуться в порты настройки OSD или F3setup, но боюсь- там нет надписи UART.
Заранее благодарю ответившего.
SP Racing F3 DELUXE Flight Controller Integrated OSD
Посмотрел мануал img.banggood.com/…/20160615031433SKU410754 SP Raci…
Из него выходит, что UART1 выведен на F3 setup, но подсоединен к OSD, то есть воткнуть BT в него можно будет только на этапе конфигурирования. Дальше работать не будет из-за конфликта с OSD. UART3 присутствует на IO_2 (по крайней мере, как RX на CH3… а где у него TX, сходу неясно). UART2 на отдельной колодке. Все, на этом процессоре всего 3 UART’а.
То есть ваш выход ИМХО - перевесить GPS на софтсериал.
У вас приемник как подключен?
На SPRF3 можно задействовать до 5 UART. Три обычных и два soft serial с ограничением скорости до 19200 кбит/с.
На вашей плате, uart1, похоже, подключен к OSD. То есть подключение к RXD1 и TXD1 ничего не даст.
По идее uart3 на разъёме IO_2: CH3,CH4.
Спасибо ответившим! Я пока выбираю контроллер. С учетом особенностей этого, думаю, что для меня предпочтительнее вариант без ОСД, но с полноценными UART.
Или всё-таки взять APM… Вот они- муки выбора деревенского нищеброда)))
Проблема - в процессе полета в режиме “angle” свежесобранный квадрик постепенно начинает крениться, так что через минуту приходится отклонять стик на половину хода, чтобы удержать квадрик горизонтально. После посадки - взлета крен пропадает, но начинает увеличиватся опять. На другом квадрике с таким же контроллером такой беды не было. Что делать?
Откалиброван правильно и полностью? В конфигураторе горизонт и направление не “плывут” при наклонах/поворотах?
Проблема - в процессе полета в режиме “angle” свежесобранный квадрик постепенно начинает крениться, Что делать?
Это вибрации, если дать полный газ, скорее всего кувыркнется на спину.
Летать в Акро.
Откалиброван правильно и полностью? В конфигураторе горизонт и направление не “плывут” при наклонах/поворотах?
Тут все в порядке.
Это вибрации, если дать полный газ, скорее всего кувыркнется на спину.
Летать в Акро.
Не кувыркается, но перекашивает конкректно. С вибрациями попробую бороться, спасибо.
С вибрациями попробую бороться, спасибо.
да, это вибрации. у мня так же. если гонять в акро то при посадке и переключении в енжл приходится стиком сильно подруливать, от раза к разу по разному, но если сильно не гонять или летать только в енжил (опять же сильно не газуя) то корректировать не приходится
Подскажите, аппаратура ct6b. Подключают по pwm, но работают только 4 канала управления, еще две крутилки никак не отзываются… подскажите что можно сделать? Прошит на бетафлай 3.0. раньше на sbus с другим приемником все работало… при этом и ct6b рабочая. Может настройки есть какие?
Не первый день мучаю F4 revo, есть большое желание подключить эту штуку к компутеру, но пока что то не получается. Полагаю что должны быть установлены какие то дрйвера для USB. Установил VCP_V1.4.0 и CP210x, но каких-либо COM портов в системе не наблюдается при подключении платы контроллера к PC. Может еще что то необходимо установить ?
Здесь Юлиан рассказывает про установку дров
Видел у Юлиана в видео, что он ставит на Ф3 танталовый кондер, чтобы платы не горели. Не победили еще эту проблему? Не нашел у нас в городе танталовых конденсаторов.
Плата питания у меня Realacc / Matek HUBOSD ECO X Type и контроллер F3 Flight Control Acro 6DOF с банггуда. Еще не подключал, страхово.
Еще не подключал, страхово
Ни на одном из полетников не подключал доп кондеры )) А их было 10 штук ровно 😆 и ни один не сгорел сам по себе
Добрый день, подскажите пожалуйста. Имею плату sp racing f3 evo и плату gps с компасом HMC5883L на борду. Как подключить внешний компас и gps. С gps вроде понятно, на uart3 можно подключить, а вот подключение компаса без отключения штатного не получается… П.С. подскажите распиновку разъема i2c смотрю на плату сверху, usb разъем от меня, с лева на право “-”,“scl”,“sda”,“+” или “-”,“sda”,“scl”,“+” ?
На i2c подключайте + - не нужен, от ЖПС возьмётся питание, если данные не пошли - местами поменяли проводки и всё. Внутренний надо отключать через конфигуратор, выбрав внешний.
Внутренний надо отключать через конфигуратор, выбрав внешний.
вот тут подробнее, если можно 😃
Ну я не знаю как у вас, что за софт и прошивка. У меня (iNAV) в конфигураторе через CLI дал команду на смену компаса или прямо в конфигураторе (последняя вресия) можно выбрать нужный и в путь. Внутренний отключается, а внешний работает.
Я тоже на INAV сегодня только прошил плату которую вчера получил, пол дня бился. Команды в CLI незнаю ни одной 😃 где читать?