CORE XY из алюминия.

Спасибо.
Можно наверное поставить по два подшипника вместо одного. Можно поставить другие подшипники.
Но торопиться с выводами пока не будем.
Что касается осей X и Y, то кинематика Core XY по идее сама должна всё ремнями выровнять и удерживать от перекосов.
Что касается Z, тоже нужно бы сначала полноценно собрать ось.
Концепция-то в общем работоспособна, а с деталями как-нибудь разберемся.
В качестве горячей головы планирую Титан Аэро.
Скорость и качество - хотелось бы, а там посмотрим, что получится.
Корень зла обнаружен.
Оказывается штампованные обоймы линейных подшипников SC8UU по природе свое довольно кривые. Ось вала не параллельна привалочной плоскости и не равноудалена от неё от изделия к изделию. И если шариковые линейные подшипники LM8UU эту непараллельность спокойно проглатывают, то втулки с более плотной посадкой просто клинят от перекоса.
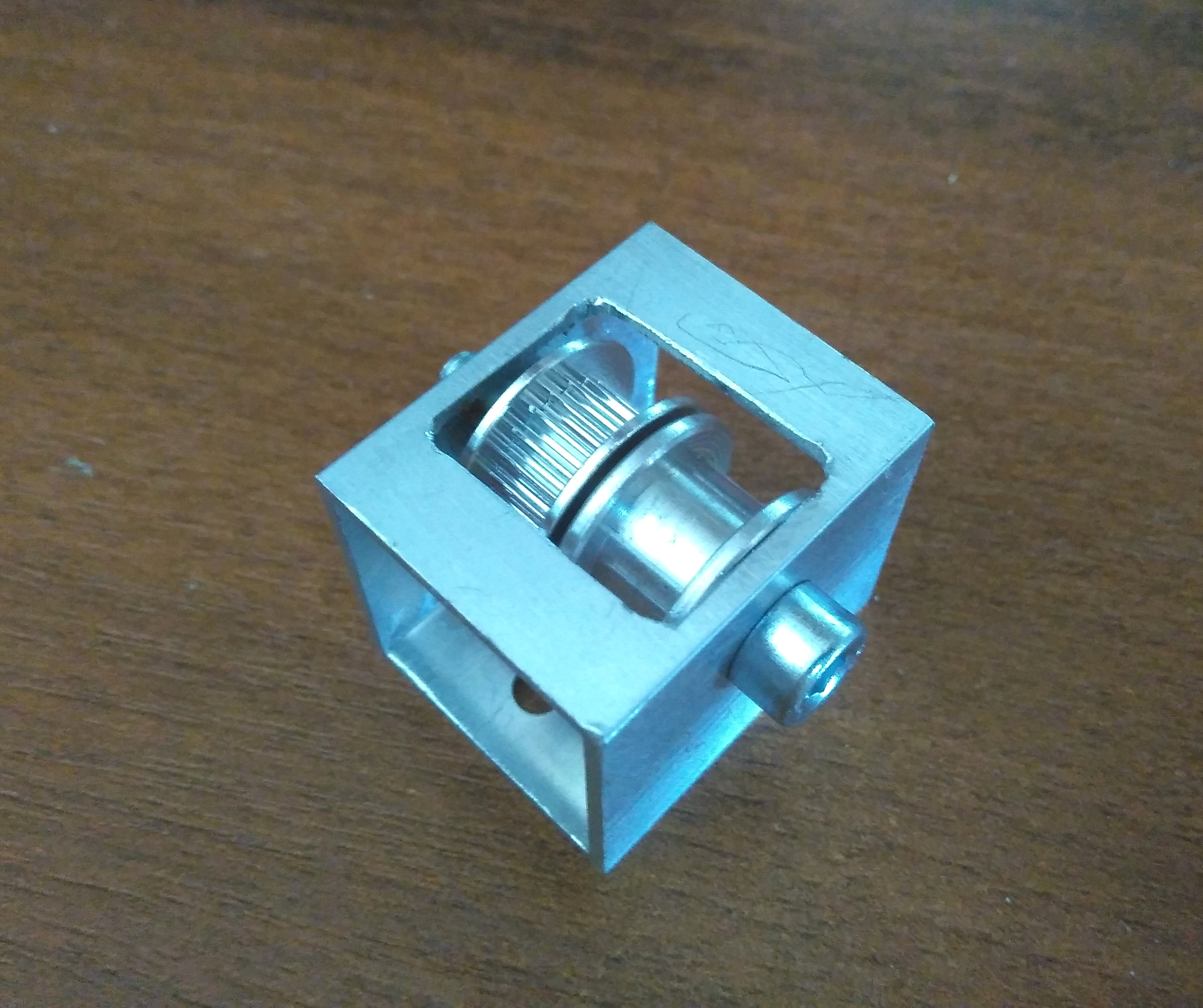
Обнаружился данный факт при монтаже кронштейна печатающей головки.
Вроде простой узел, валы зажаты в абсолютно одинаковые кронштейны, фрезерованные с одной установки. Однако при затягивании винтов втулки клинит. Стал разбираться, переворачивать и переставлять обоймы. В варианте на фото нашел минимальное расхождение. Но все равно, к одной обойме притягиваю - ок, начинаю затягивать винты на второй обойме - клин. Есть какая-то десяточка непараллельности или разница в расстоянии от оси вала до привалочной поверхности (на фото стрелками) и этого достаточно, чтобы втулки заклинило.

Всё это конечно не радует, но теперь хоть известно с чем бороться.
Макетирование модуля роликов.
Надо бы по хорошему трубу или швеллер 30х25, но в наших лабазах такого не нашлось. Поэтому придется использовать трубу 25х25.

Всё это конечно не радует, но теперь хоть известно с чем бороться.
Если бы только это причина, то она бы заклинила от перекоса на том же месте где затянули винты.
Такие плоскости выводятся на пару, с подшипниками скольжения часто работаю, не сложно (только когда люфты в подшипниках это бессмысленно):
Так на том же месте и клинит.
Полдня колупаний сверлилкой, дремелем, напильником и корпуса модулей шкивов готовы.


А отверстия под оси как сверлили, все-же на станке? Врукопашную вертикальность осей вряд ли можно обеспечить.
сверлилкой
это и есть сверлильным станком.
рядом со словом дремель, сверлилка могла обозначать обычную дрель 😃

Есть такое волшебное слово - разметка…) При наличии штангенциркуля и какой нибудь острой хреновины для кернения соосные отверстия не проблема даже дрелью… Ну а тонкие стенки заготовки делают серьезную скидку на неперпендикулярность отверстия к плоскости…
… на неперпендикулярность отверстия к плоскости…
Я про само соответствие отверстий снизу и сверху. Тут даже доли градуса (наклона оси роликов от вертикали) сулят проблемы - ремень будет к одному, либо другому бортику отжиматься, не центруясь по средней части шкива, и это плохо. У меня не супер большой опыт в принтерах - но с именно такой проблемой уже довелось столкнуться разок!
Тут даже доли градуса (наклона оси роликов от вертикали) сулят проблемы - ремень будет к одному, либо другому бортику отжиматься, не центруясь по средней части шкива, и это плохо.
Он и пишет про то, что глубокие отверстия или отверстия “снизу и сверху” делать с разных сторон, для соосности.
Шкивы расставлены по местам.



ИМХО, подвижная масса портала не великовата ли?
Посмотрим.
Видел конструкции и помассивней, с двумя подшипниковыми блоками на каждый вал и кучей всякого другого железа.
Продёрнул ремни.


Супер-пупер натяжитель на скорую руку.


В общем всё катается, но уровни и расположение роликов нужно подкорректировать, чтобы убрать некоторое искажение геометрии.
Буквально передвинуть влево-вправо, подложить шайбочки, приподнять ось и т.п.
Натяжитель тоже надо бы до ума довести.

ИМХО, подвижная масса портала не великовата ли?
3кг голова. 😃
В общем всё катается, но уровни и расположение роликов нужно подкорректировать, чтобы убрать некоторое искажение геометрии.
Буквально передвинуть влево-вправо, подложить шайбочки, приподнять ось и т.п.
Натяжитель тоже надо бы до ума довести.
Выглядит хорошо. но чтобы стол не клинил, сделайте хотя бы 3 направляющих. 4 многовато.
3кг голо…
Во-первых видел, во вторых - особое внимание к моторам: это не какие-то там 17-ые или там 23-ие нагреватели 😃
Во-первых видел, во вторых - особое внимание к моторам: это не какие-то там 17-ые или там 23-ие нагреватели 😃
ну да. бесколлекторники как сервомоторы. хорошая тема. сейчас изучаю ее. 😃
Сейчас, когда ремни по X и Y равномерно натянуты, портал абсолютно не переклинивает и его можно таскать руками, прикладывая усилие только к одной из его сторон.
Стол тоже будет на двух ремнях, синхронизированных валом (см. первый пост). Поэтому 4 вала для оси Z очень просились для симметрии и сбалансированности. По сторонам, к которым будут крепиться ремни, перекос исключен. В перпендикулярном направлении теоретически возможен.
Как оно будет работать на практике, посмотрим.
А так вообще немало конструкций с 4-мя валами или с 4-мя каретками на роликах, которые ходят непосредственно по профилям (v-slot).
Здесь по идее основная сложность в том, чтобы выставить параллельно валы.
ну да. бесколлекторники как серв…
Дык он и есть готовый сервомотор - он же синхронный. Вопрос лишь в драйвере. И в охлаждении. На экструдер первее всего БК-шник бы воткнуть - сразу вес в несколько раз ниже был бы. Можно сделать легковесный директ-драйв.