Дальность действия аппаратуры управления.

“А вот если…”
А вот если взять бытовую радиостанцию мидланд 433МГц, с декларируемой мощностью около 4Вт, вместо гарнитуры воткнуть в нее PPM сигнал с тренерского разъема. А в качестве приемника использовать такую же + микроконтроллер для разбора полученного PPM по каналам. Какую дальность можно ожидать? 😃 Разборчивость речи теряется на 4 км по прямой в неидеальных условиях. Но это речь, а тут PPM.
А?
Разборчивость речи теряется на 4 км по прямой
Разборчивость речи на фоне шумов и прием импульсной последовательности без ложных импульсов - две ОООчень большие разницы… IMHO результат будет на уровне стандартной 1W RC аппы…При приеме речи вы спокойно можете терять часть информации (букв, слов) т.к. далее ваш мозг ее спокойно восстанавливает по смысловому содержанию принятого, при приеме импульсного сигнала для RC можно конечно применить кодирование с коррекцией ошибок, но это будет явно дороже этих Мидландов…
-------------------------------------------------------------------------------------
Диапазон 433 хоть и очень интересный с точки зрения распростанения сигнала и экспериментов с антеннами, но уж больно много на нем сидит связной бытовухи и радиолюбителей … К чему рисковать появлением незапланированных помех в самый неподходящий момент?
“А вот если…”
А вот если взять бытовую радиостанцию мидланд 433МГц, с декларируемой мощностью около 4Вт, вместо гарнитуры воткнуть в нее PPM сигнал с тренерского разъема. А в качестве приемника использовать такую же + микроконтроллер для разбора полученного PPM по каналам. Какую дальность можно ожидать? 😃 Разборчивость речи теряется на 4 км по прямой в неидеальных условиях. Но это речь, а тут PPM.
А?
Была как-то мысль использовать такую подставу,только применять вместо радиостанций сотовые телефоны.Позвонил на борт,нажал на ответ и вперёд в небо,пока деньги на счету передающей стороны имеются.
При приеме речи вы спокойно можете терять часть информации (букв, слов) т.к. далее ваш мозг ее спокойно восстанавливает по смысловому содержанию принятого, при приеме импульсного сигнала для RC можно конечно применить кодирование с коррекцией ошибок, но это будет явно дороже этих Мидландов…
Но ведь я также могу спокойно терять часть информации из PPM сигнала. Если он идет с частотой 50Гц, а для управления большой аэродинамически устойчивой моделью, да на хорошей высоте мне достаточно вдестяро меньшей частоты поступления команд. При этом, реализовать фэйл-сейф в принимающем микроконтроллере проблем не составляет.
У радиостанции довольно большой вес. Потребуется нехилая модель чтобы тащить ее на борту. А плюсы при этом не очевидны.
Т.к. 3-4 км стабильно достигаются с обычным 500 мватт видео передатчиком Lawmate 1.2 гГц (avm.su) и обычной самолетной аппой на 2.4 (0.2 вт вроде мощность) + направленные антенны (у меня - по 12 дБл). Т.е. тут никаких особых усилий не нужно, главное - направленные антенны.
Сложнее достичь дистанции сигнала 5-10 км.
Вообще, направленные антенны решают. В принципе, с хорошей направленной антенной (или параболической) при мощьности передатчика 0.5 - 1 ватт вполне достижимы дальности в 10 и более км. При этом наращивать мощьность передатчиков свыше штатной для этих дальнойстей не обязательно - главное использовать подходящие направленные (или параболические) антенны и правильно их направить.
Тут была тема, где человек летал с 1-ваттым передатчиком 2.4 гГц на 50 км.
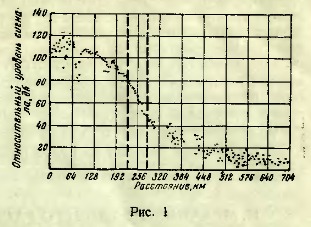
Использовался эффект рассеяния коротковолнового сигнала в тропосфере (“эффект тропо”, тропосферное рассеяние). Скорость его ослабевания с расстоянием такова, что позволяет принимать наш рассеянный сигнал на дальностях 5-10-… км. Направлять при этом антенну надо: по горизонтали - в сторону самолета, по вертикали - точно в горизонт (горизонтально), т.к. максимальный поток мощности при тропосферном рассеянии будет идти оттуда.
Вообще, эти вещи рассмотрены в книге “Дальнее распространение ультракоротких волн”, Е.Л. Черенкова.
www.cqham.ru/lib.htm
Вот из книги график зависимости мощьности коротких волн (220мГц) от расстояния
—
он идет с частотой 50Гц
С таким периодом повторения (20ms) работают старые аппараты, у большинства это 16-18ms, а для нормальных цифровых серв эта величина уже составляет 5,5ms …
Устанавливая файл-сейв вы искусственно гробите динамические параметры системы управления, которых в большинстве случаев и так не хватает…
Можно конечно и так работать (файл-сейв или выдача инфы после приема двух одинаковых пакетов), но реакцию системы угробите однозначно… Ежели это для управления трактором со скоростью 5 км/час - можно забить, а вот для большинства моделей (хоть летающих, хоть авто, хоть судо) такие режимы неприменимы…
Не подскажит кто по антене:на выходных сломал оную на передатчике Futaba-из за ростегнувшегося карабина на шнурке.Передатчик полетел в густую траву,удара вроде не было,просто воткнулся антеной в землю.Антена пополам:(😦.Подойдет с радиорынка подходящей длины и диаметра,или нужно фирменную искать(вдруг на надежность повлияет).Та была упругая и на разломе медного цвета
"Ежели это для управления трактором со скоростью 5 км/час - можно забить, а вот для большинства моделей (хоть летающих, хоть авто, хоть судо) такие режимы неприменимы… "
Спорно. Для хорошей модели достаточно 10-5 и менее корректирующих сигналов в секунду.
Как раз в отличие от авто (где всегда есть неровности на земле и есть риск резкого изменения курса машинки из-за кумушка/ямки и т.д.), воздушная модель если аэродинамически устойчива и стабильна, то фактически она летит сама прямо и равномерно, никуда не отклоняясь и 5, и 10, и 30 секунд. Все отклонения в воздухе очень плавные. Хорошая большая модель так и летает. Со скоростью это никак не связано. Соответственно, корректировки ей нужны только для плавного изменения курса, в частых корректировках нет необходимости. В остальном она летит сама по курсу, причем даже без системы стабилизации. Т.е. летать по курсу преимущественно прямо, с плавными маневрами.
Если же модель дополнить системой стабилизации - то вообще ей можно будет подавать только сигналы изменения направления/задания курса по мере надобности (раз в минуту…).
Для примера, мое ЛК 1.9 метра размахом без корректирующих сигналов держит курс и высоту само секунд 10-15 минимум. Скорость - 70/80 км/ч.
Естественно, все это не относится к “взлету - посадке”. Тут нужно быстрое управление - т.е. очевидно должно быть два режима: режим взлета-посадки с быстрым управлением, и режим курсового полета с медленным управлением.
------------------------
--------
Касательно эффекта тропосферного рассеяния. Мой самолет не позволяет улететь дальше 3 км, т.к. не хватает запаса аккумуляторов. Но при этом запас дальности сигнала видео и управляющего еще явно есть (на 3х км все стабильно). Вот и интересно, в какой момент перестает быть преобладающим сигнал прямой видимости с передатчика на самолете и начинается доминировать эффект тропо.
Т.е. по идее, если скажем он начинает преобладать с 5-го километра, то если сигнал будет у меня на 5-ти километрах, то он будет уже и далее на 10 и более км - т.к. ослабление сигнала до нескольких десятках км из-за тропосферного рассеяния назад, идет медленно.
Т.е. получается, что рецепт больших дальностей такой: достаточно дотянуться по дальности сигнала до граници начала тропосферного эффекта, чтобы сигнал был и все расстояние далее на несколько десятков км.
—
Спорно. Для хорошей модели достаточно 10-5 и менее корректирующих сигналов в секунду.
Все упирается в параметры конкретной модели и ее инерционность при движении, а так-же требованиям по быстроте управления… На больших RC самолетах в общем случае свет клином не сошелся … 😃
Подойдет с радиорынка подходящей длины и диаметра
Подойдет… Все они из латунных трубок с подслоем меди под никелем… 😃
С таким периодом повторения (20ms) работают старые аппараты, у большинства это 16-18ms, а для нормальных цифровых серв эта величина уже составляет 5,5ms …
Устанавливая файл-сейв вы искусственно гробите динамические параметры системы управления, которых в большинстве случаев и так не хватает…
Не очень понял, как от серв может зависить работа передатчика, ну да ладно. Если частота PPM на выходе передатчика выше - то еще лучше! Можно больше пакетов растерять 😃
А что каксается файл-сейва - можно же просто отсекать все пакеты, заведомо не влезающие в нормальный диапазон длинн импульсов. И выдавать вместо них последние “прошедшие” значения до тех пор, пока не пролезет новый годный пакет. А годные пакеты пропускать сразу. Какое ограничение динамических параметров при этом может происходить? За счет времени разбора сигнала? Ну это задержка в десятки микросекунд, не критично.
Собственно, вопрос здесь только в том, целесообразно ли использовать готовые бытовые радиостанции как быстрое (всего деталек - 1 микроконтроллер с обвеской на приемнике) и мощное (достаточно ли?) решение для увеличения дальности работы аппаратуры. Понятно, что на 1 км это смысла не имеет. Может быть не имеет и на 2. Но вдруг оно работает на 10 без направленных антенн?? 😃 А область применения - дальнолеты 😃 подразумевает большой тяжелый и скорее всего ДВС. Иначе по запасу батарей особо не разлетаешься. А это уже позволит не жаться на 100грамм веса радиостанции. Которая при желании легко превращается грамм в 50-70, если корпус выкинуть.
Идея увеличения дальности за счет направленных антенн красива чистотой эфира. Но придется:
а) запасаться помощником с биноклем чтоб ее крутить на модель;
б) придумывать объяснения всяким бдительным согражданам что ты не шпиён 😃
А вообще, на мысль с готовыми рациями меня натолкнули длительные попытки разобраться в рынке всяких радиопередающих модулей, которые зачастую стОят сравнимо с готовыми радиостанциями, а их еще паять, налаживать, антенну городить…
Но вдруг оно работает на 10 без направленных антенн??
Вряд-ли… При тестировании (голосовая связь на уровне различения смыслового содержимого) получили до 8 км (при рассчетной прямой видимости около 10 км)… Для дешифровки импульсной последовательности без искажения - будет явно меньше…
Перспективнее все-же направленные антенны - сокращение лепестка с 360 градусов (круговой бублик у штыря) до 180 градусов эквивалентно увеличению сигнала в точке приема в два раза…
Прочтите эту тему с начала. Вопрос мощьности уже обсуждался. Увеличение мощьности в 4 раза - дальность в два раза. Это вполне реальный выход, но учтите следующий момент: если ваш передатчик на борту будет жрать большую мощьность, то это дополнительное питание и вес.
Плюс к этому, вы забыли о такой важной вещи, как передача видеосигнала с борта. Прикрутить его к бытовой радиостанции будет заметно сложнее. И это снова вес.
По поводу “чтоб не шпиен” - тем громче орет ваш передатчик, тем больше вопросов.
Касательно вопроса с ориентацией антенны:
“а) запасаться помощником с биноклем чтоб ее крутить на модель;” - в этом нет необходимости, если лететь в луче.
Допустим у вас направленная антенна с диаграммой 30 градусов - это дает усиление в 12дБл (более 10 раз!). При этом 30 градусов - это достаточный угол, просто направляете антенну примерно в сторону, в которую полетит самолет и летаете туда. Все, направлять точно на самолет не нужно. А при маневрах вблизи (100-300 метров, взлет-посадка) не имеет значения, куда направленна антенна - поймает по любому.
Так что собственно вопрос в том, как дабиваться одной и той же цели:
- можно усилить мощьность принимаемого сигнала в 10 раз использовав направленные антенны на 10 дБл на земле.
- можно усилить мощьнось передатчика в 10 раз (в том числе придется на борту самолета - для видео).
Идеально использовать оба варианта в сочетании. Но если выбирать что-о одно - вариант с антеннами и дешевое и выгоднее (нет лишнего веса и энергопотребления).
Паять антенны не надо - они подсоединяются к видеоприемнику и передатчику управления, разъемы там стандартные (как у WiFi).
Кроме того, для очень больших расстояний (> 10 км) вам все равно придется использовать направленную антенну - т.к.
на этих дистанциях бОльшая часть мощности приходит вроде под малыми углами к горизонту, как результат тропосферного рассеяния. Т.е. не имеет смысла собирать сигнал отовсюду, если он идет с горизонтального направления - чтоб зря не ловить помехи, нужна направленная антенна.
А до 2-5 км хватает обычного передатчика 0.5 ватт и направленных антенн.
Даже 2-3 км для большинства это предел - не так-то просто построить планЕр, который осилит такой полет.
Вряд-ли… При тестировании (голосовая связь на уровне различения смыслового содержимого) получили до 8 км (при рассчетной прямой видимости около 10 км)… Для дешифровки импульсной последовательности без искажения - будет явно меньше…
Вот этот-то вопрос меня и интересует! Почему, собственно, меньше? Для голосовой связи я могу потерять максимум процентов 30-50 информации. Для PPM - 90%. Голос - волна сложной формы, мне кажется, ее передать существенно сложнее, чем тупой меандр. Ведь PPM это, если хотите, морзянка своего рода. Да-нет.
По поводу “чтоб не шпиен” - тем громче орет ваш передатчик, тем больше вопросов.
Да я не агитирую за мощность! Просто интересно имеет ли смысл возиться с испытаниями раций на 433МГц или это очевидный тупик. А вопросы, поверьте, возникают не у пеленгаторов (чего им делать на разрешенном 433МГц??) а у зевак-ментов, наблюдающих кучу хитрой аппаратуры и определяющих “шпиённость” по габаритам антенн и прочих фидеров 😃
Пока что для 433МГц я вижу серьезное ограничение только одно - реальная забитость диапазона детьми, туристами, крановщиками… Им, конечно, будет не шибко интересно общаться на занятой частоте, но сбить модель случайно могут.
Даже 2-3 км для большинства это предел - не так-то просто построить планЕр, который осилит такой полет.
Какие сложности-то? Китайский ДВС тренер-верхнеплан 0,46 легко и непринужденно пролетит это расстояние за пару минут с полезной нагрузкой в полкило, израсходовав максимум процентов 10 топлива в баке…
Кроме того, для очень больших расстояний (> 10 км) вам все равно придется использовать направленную антенну - т.к. на этих дистанциях бОльшая часть мощности приходит вроде под малыми углами к горизонту, как результат тропосферного рассеяния.
На >10 км (а наверно и менее 10 тоже) придется направленную антенну использовать как минимум на приемный тракт видеокартинки, т.к. мощность передатчика на борту гораздо более ограничена, чем передатчика на земле.
Поищите сообщения fmkit в полетах по камере, он вроде делал на рациях.
Спасиб:).Да антена действительно латунная оказалась.Найти бы теперь,с резьбой М3 в основании,а то попадаются восновном с ушком
Голос - волна сложной формы, мне кажется, ее передать существенно сложнее, чем тупой меандр. Ведь PPM это, если хотите, морзянка своего рода. Да-нет.
Для передачи спектра частот у разборчивой речи достаточна полоса частот в 1,5-2 кГц (см. полосы частот у телефонистов). Для передачи реальных сигналов управления (импульсы в 1,5 мс +/-) с хорошими фронтами требуется полоса частот в 3-5 раз большая… Ежели мы тупо впихнем нашу импульсную последовательность в тракт связной радиостанции с ее полосами пропускания, рассчитанными на голосовую связь то автоматом завалим фронты у управляющих импульсов + наложение на них помех… В итоге на выходе мы получим не нормальный управляющий импульс, а импульс с гуляющей длительностью… О какой точности передачи управляющего сигнала мы тогда будем говорить?
IMHO Единственный нормальный вариант использования раций для RC это использование у них ТОЛЬКО ЛИНЕЙНОЙ ВЧ части, а все, что касается модуляции/демодуляции и кодирования/декодирования сигналов делать по новой…
В итоге на выходе мы получим не нормальный управляющий импульс, а импульс с гуляющей длительностью… О какой точности передачи управляющего сигнала мы тогда будем говорить?
Ну собственно это мне и было интересно услышать. Жалко, осциллографа нормального нет под рукой чтобы все это наглядно посмотреть. Т.е. затея дохлая? “Гуляние длительности” будет слишком большим? Скажем, 50мкс уже можно бы и потерпеть…
Для передачи реальных сигналов управления (импульсы в 1,5 мс +/-) с хорошими фронтами требуется полоса частот в 3-5 раз большая
Не совсем так. В RC передатчиках 35 и 40 Мгц перед модулятором стоит ФНЧ с частотой среза 2.5-3 кГц, к-рый давит фронты. Иначе невозможно будет влезть в узкий ЧМ канал (< 10 кГц). Так что полоса при передаче РРМ примерно такая же как и для речи.
Спасиб:).Да антена действительно латунная оказалась.Найти бы теперь,с резьбой М3 в основании,а то попадаются восновном с ушком
А впаять туды гайку латунную не пробовал? Вместо ушка.
Не совсем так. В RC передатчиках 35 и 40 Мгц перед модулятором стоит ФНЧ с частотой среза 2.5-3 кГц, к-рый давит фронты. Иначе невозможно будет влезть в узкий ЧМ канал (< 10 кГц). Так что полоса при передаче РРМ примерно такая же как и для речи.
Ну вот, почти уже отговорили меня, так нет, опять искушают… Короче понял, надо пробовать.
Скажем, 50мкс уже можно бы и потерпеть…
Скажем так… - считать надо и пробовать надо… Сетка каналов на LPD идет через 25 кГц…
Ваши 50 мкс в пересчете на потенциальную точность цифровых систем - это шумы на уровне 8 битного кодирования (256 уровней разрешения)… Нормальная современная аппаратура выпускается с 10 битным кодированием (1024 уровней), отдельные модели идут с 11 битным (2048)…
Если вас устраивает такая точность передачи пропорционального канала то эксперимент неизбежен… 😃
… хотя стоимость эксперимента окажется сравнимой со стоимостью уже готовой аппаратуры …
Не совсем так.
…
Так что полоса при передаче РРМ примерно такая же как и для речи.
Не вдаваясь в детальные просчеты реально для РРМ ширина спектра все-же больше, чем для передачи голоса…
… безотносительно полосы не забываем, что внутри нее сам “голос” мы можем передавать с существенными искажениями, чего не можем позволить при передачи и обработке РРМ …