Новая эра крепких микровертолетов. New "Ultra Durable" 120 Heli from Walkera - V120D02S

И ещё.
Обучение полётам на 120-ке, по-моему, всяко дешевле обучения на 250-ке или 450-ке.
Он не опасный, дерётся чувствительно, но не катастрофически.
В общем, всё, что я в него вложил, дало неплохой выхлоп в виде удовольствия от того, что справился с этой штукой.
Мини-гениус тоже есть, но обучаться на нём уже сложнее, вес его уже совсем никакой.
поставил длинную качалку на хвотсовую серву. Плюс у меня старый приемник 3-х осевой.
Вот оно.
Трёхосевой.
Поэтому, может, и не срывает хвост и поэтому, может, работает длинный рычаг.
У меня любая попытка удлиннить рычаг хвостовой сервы приводит к болтанке.
В моем случае стоит 6-ти осевой приемник и удиленная качалка, хвост не срывает и не болтает - пробовал даже летать по кругу хвостом вперед и делать воронки. Вот только летает 120-ка по сравнению с тем же v977 ужасно, до такой степени ужасно, что даже словами выразить не могу. Она как робот -переворачиваешь её, а она зараза фиксируется, летишь просто по прямой, а она как дельфин прыгает по волнам - жесть! Той плавности, той маневренности, послушности и предсказуемости как у v977 у неё нет и не будет. Я в ней позаменял половину запчастей на новые (кроме серв, наверное дело в них, т.к. уже раздолбаны прилично), устранил все люфты и вибрации, а она как была … (естественно по сравнению с другими моделями) так и осталась((( Люди попробуйте наконец нормальный вертолет (v977) и сразу увидете разницу! Все вышесказанное конечно ИМХО и если говорить о новичках, то 120-ка для обучения подойдет, но для продвинутого и свободного полета нет.
В моем случае стоит 6-ти осевой приемник и удиленная качалка, хвост не срывает и не болтает
А приемник с какой версией прошивки?
Люди попробуйте наконец нормальный вертолет (v977) и сразу увидете разницу!
V977 слишком… роботизированный что ли, как-то это раздражает, причем под “роботизированный” я подразумеваю то, что нет у нее инерции (веса мало) и выходит, как стик дернишь, так он и дернется, как в симуляторе. Да и стоковый мотор вялый, конечно с MX-10A и M5 все гуд, но из коробки печаль.
Программатора нет для неё, а проверить прошивку незнаю как. Могу сказать только то, что я её не менял, а покупал вертолет в июле 2012 года. По поводу дурки хвоста подтверждаю, что она была до того как поставил качалку от сервы АП, до этого хода слайдера не хватало и хвост не справлялся с нагрузкой тем самым проходил проворот на 180 градусов. Кстати даже после того как перестало срывать хвост я не рискую его сильно нагружать (летаю хвостом вперед только в полный штиль), т.к. нет уверенности что его не сорвет при ветре.
По поводу дурки хвоста подтверждаю, что она была до того как поставил качалку от сервы АП
Попробую сегодня поставить на хвост металлическую серву, посмотрим как поведет себя зверь.
Она как робот -переворачиваешь её, а она зараза фиксируется
V977 слишком… роботизированный что ли, как-то это раздражает.
Чего-то отзывы непонятные.
Что понимается под роботностью как 120-ки, так и 977?
Люди попробуйте наконец нормальный вертолет (v977) и сразу увидете разницу!
Я уж лучше подожду, когда уляжется пыль от новизны, пока не пройдут все новые года (католические, православные, китайские, персидские…) и по весне, если всё будет относительно нормально, взять 180-ку от блейда.
А до того буду строить 250-ку. На нормальных мозгах, с относительно нормальными комплектующими.
А 120-ка будет для души.
Хотя вполне вероятно, что после знакомства с нормальным поведением вертолёта 120-ка будет неимоверно раздражать. Я к этому готов и ни капельки не жалею вкинутых в неё денег.
Что понимается под роботностью как 120-ки, так и 977?
Как бы это сформулировать…
- V120 слишком перестабилизирована и порой стабилизирует тушку там, где не нужно и это мешает летать.
- V977 средняя стабилизация, которая не мешает летать, но при этом есть пирокомпенсация. Упрвляется в точности так, как “дергаешь” стики и нет ощущения веса вертолета. Ну это как на автомобиле ГУР - в повороте чувствуешь машину и есть отдача ну руль, а есть ЭУР - поворачиваешь так же, но нет обратного усилия на руль. Вот и в V977 не хватает ощущения веса, он летает ровно так, как ты им управляешь и мне это не нравится.
нет обратного усилия на руль
Отличная, кстати, идея.
Моторизованный пульт с пропорциональной отдачей на стики.
Продать, что ли, блейду или валкере?
А то и футабе, чо уж там.
Ну или влтойз на худой конец.
Как бы это сформулировать…
- V120 слишком перестабилизирована и порой стабилизирует тушку там, где не нужно и это мешает летать.
- V977 средняя стабилизация, которая не мешает летать, но при этом есть пирокомпенсация. Упрвляется в точности так, как “дергаешь” стики и нет ощущения веса вертолета. Ну это как на автомобиле ГУР - в повороте чувствуешь машину и есть отдача ну руль, а есть ЭУР - поворачиваешь так же, но нет обратного усилия на руль. Вот и в V977 не хватает ощущения веса, он летает ровно так, как ты им управляешь и мне это не нравится.
Совершенно верно. А мне наоборот очень нравится то, что как управляешь вертом так он и летает без лишних выкидонов и лишней стабилизации.
Дима завязывай ты с этой 120-кой))) Поражает твоя проницательность сделать из нее хороший верт)) хотя это огромный плюс твое упорство в этом вопросе… это как из 922 сделать хороший летающий верт…
Ща 180cfx получим поедем облетывать по любому)))…
Дима завязывай ты с этой 120-кой)))
Обратного пути нет! Пока не завершу 120-ку на 2S с GY280RX, не успокоюсь.
Ща 180cfx получим поедем облетывать по любому)))…
Запчастей бы где найти, хотя бы шестерней и линков 😃)))
Там нужны, судя по отчётам, не линки с шестернями, а валы привода хвоста (ломаются наконечники, у одного прямо из коробки) и шестерёнки серв (надо примерить, действительно ли подходят от 120-ки).
Домучил я свой V120D02S с родным приемником под 1S. Теперь летает “правильно”.
Но сначала вернемся на пару дней назад. Захотелось мне поднять мощность зверьку и поставил ESC XP-7A и мотор M5 kv14000. Тяга заметно поднялась, но мотор и ESC очень и очень сильно грелись - тяжела для этой связки тушка V120.
Было принято решение поставить мотор более тяговитый и ESC с большим запасом.
Выбор пал на:
- ESC XP-12A (этот ESC не нуждается в представлении, так как один из лучших в своем классе)
- Мотор HP06VX (продавец утверждал, что данный мотор хоть и под 1S, но выдает такую тягу, как буд-то он под 2S, забегая веред скажу, что так оно и оказалось)
- Пиньон 10Т, снят со штатного мотора
Теперь о том, что сделал и как делал
- Первое что сделал, припаял на ESC разъем для перепрошивки на BLHeli и перепрошил на версию 11.2 (12-ую версию лучше не шить, глючная она какая-то). Скриншот конфигурации привожу ниже.
Остановимся на ряде настроек, которые влияют на поведение мотора:
Governer P-Gain: Можно поднять до 1.5. В этом случае при резком увеличении “газа” или при резком увеличении “шага” зверь резче отреагирует. Но я оставил единицу, так как с 1.5 уж очень как то резко дергает вверх.
Governer P-Gain/I-Gain: А вот этот параметр лучше не поднимать более 1. Например, если поднимем до 1.5, мотор резче будет замедляться, значительно быстрее, чем успевает отрабатывать гироскоп. Выходит следующее - вы резко уменьшили шаг или резко снизили обороты газом, мотор резко отреагировал, а гироскоп нет и шаг на лопастях ХР на долю секунды остается еще как при газе, который был до этого. В итоге тушку проворачивает градусов на 30-40. Если же оставляете параметр 1, все хорошо, никаких проблем с хвостом.
Governer Target RPM - долго подбирал оптимальный параметр. Остановился на варианте чуть больше 4000.
Startup power: для этого мотора оптимально 1.25. Если поставить ниже, например, 1.0 - мотор запустится, но с усилием. На 0.75 тоже запустится, но с дерганьем тушки.На 0,5 и вовсе не запустится. Мотор мощный, поэтому и требует большого значения, но в то же время более 1.25 ставить не имеет смысл. ИМХО 1.25 это оптимальный параметр для уверенного старта.
Startup RPM - оставляем значение по умолчанию 1. Это обороты на которых происходит старт мотора. Можно поставить значение чуть выше, но по сути ничего не даст, разве что появится легкий рывок при старте.
Startup Acceleration - мотор мощный, тяговитый и раскручивается при старте не быстро. Поэтому поднял значение до 1.5
Motor timing - при стандартном значении “Medium” мотор работает стабильно, но заметно греется. Поэтому понизил тайминг до “Medium Low” - при этом значении мотор работает так же стабильно как и при Medium, но при этом греется заметно меньше.
PPM Min/Max - значения которые видите на скриншоте соответствуют калибровке с передатчика. По умолчанию задан меньший диапазон и если оставить настройки стандартные, газ будет работать в урезанном диапазоне. Так что смело вводите значения как на скриншоте и газ будет работать во всем возможном диапазоне.
После того как разобрались с ESC, пришло время разобраться с поведением хвоста. А разбираться придется. Так как мотор очень мощный, в разы мощнее стокового и если не изменять настройки гироскопа, получите тряску хвоста.
-
Приступаем к настройке приемника. На самом приемнике установить правую крайнюю крутилку, отвечающую за диапазон движения сервы по рудеру, на значение между 11 и 12 часами. Крутилку, отвечающую за гироскоп по элерону и элеватору (левая крайняя), поставить ровно на 12 часов.
-
В настройках конфигурации модели в Devo значения гироскопа (7-ой канал) нужно понизить. У меня переключение чуйки гиры привязано на тумблер Mix: 0-положение для помещений, 1-положение для улицы, 2 - для настройки тушки зверя. Далее привожу значения:
- Mix0 75% (если у вас прошивка Deviation и включен режим advanture, то значение будет 50).
- MIX1 72% (если у вас прошивка Deviation и включен режим advanture, то значение будет 44).
- MIX2 50% (если у вас прошивка Deviation и включен режим advanture, то значение будет 0).
Результат: замечательная тяга, сравнимая с той, которую выдает мой второй V120 с 2S и мотором HP08S 2S kv7600. Конечно же чудес не бывает и прирост производительности отразился на времени полета - сократилось примерно на 25-30% от времени полета на штатном ESC и штатном моторе.
Все выше описанные эксперименты проводились на обычной штатной тушке V120D02S, со штатными аккумуляторами и с карбоновыми лопастями Xtreme для Blade 130X
p.s. в планах еще припаять мотор напрямую к ESC, а так же заменить разъем аккумулятора на JST
***
Кстати, попробовал (еще до экспериментов с выше описанным контроллером и мотором) заменить качалку хвостовой сервы от циклика, шарик прикрутил максимально близко к серве. Результат разочаровал - тряска хвоста. Судя по всему из-за того, что тяга сильно изгибается и начинает с усилием тереться о направляющую.
Сервы на циклике родные?
Мозги родные?
Судя по всему из-за того, что тяга сильно изгибается и начинает с усилием тереться о направляющую.
У меня хвост развёрнут в другую сторону и тяга проходит снизу, свободная на всём протяжении. Точно так же болтает хвостом при удлиннении качалки. Это явно из-за гиперчувствительности гироскопа хвоста.
Startup power:
Вот помогло!!! Только не со 120-кой, а с минигеной: я прошивал-прошивал ему контроллер и допрошивался до того, что он перестал инициализироваться, вместо пи-ли-ли при дёрге газом он начинал непрерывно пикать.
Оказалось, сбилась настройка Startup power, и слава богам, он опять работает!
сравнимая с той, которую выдает мой второй V120 с 2S и мотором HP08S 2S kv7600. … времени полета - сократилось примерно на 25-30% от времени полета на штатном ESC и штатном моторе.
А на сколько время полёта на этом моторе меньше времени 2S?
ЗЫ Вопрос по мозгам снимаю.
Встал другой вопрос: в чём глючность 12-й прошивки контроллера?
Все сервы родные, мозги родные.
Я не говорил, что 2s дольше летает. Я про то, что штатный 1s летает дольше (но в разы овощнее), чем xp12a + hp06vx
12-ая прошивка то конфиг сбрасывает, то мотор как-то неадекватно себя вечти начинает. Причем глюки на нескольких разных esc вылезали.
P.s. Минигене тоже вбей значения ppm min / ppm max с моего скрина, что бы газ полноценно работал. Кстати, с валькировскими приемниками муторно газ калибровать. Недостаточно включить верт с поднятым газом, нужно дать максимальный газ после двойного дерганья лопастей при бинде.
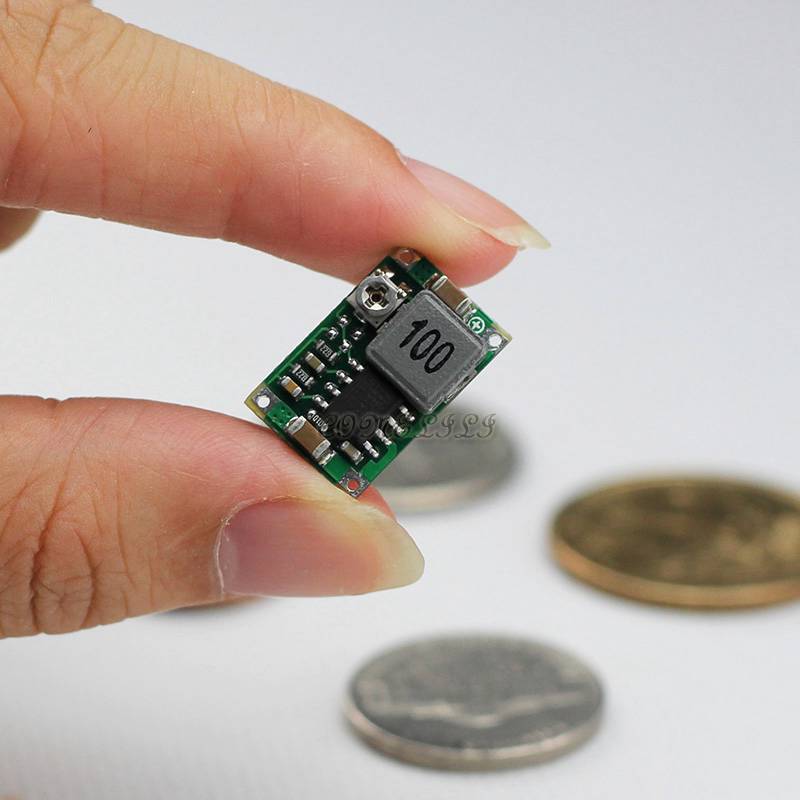
Оказывается можно решить проблему с тряской и перегревом штатных серв после перехода на 2S! Достаточно понизить напряжение до 4.5V (чаще всего BEC в ESC выдает 5-5.5 вольт, а это слишком много для штатных серв). Благо и для GY280RX рабочий диапазон от 4V до 6.5V, так что есть возможность понизить до 4.5V без последствий.
Понизить очень просто с помощью Mini DC-DC конвертера (на выходе DC 1.0V-17V)
То есть если втыкать туда альтернативные сервы, то им будет хорошо?
Они ж на 6 вольт тоже работают.
То есть если втыкать туда альтернативные сервы, то им будет хорошо?
Если в GY280RX подключать альтернативные сервы и запитывать от 2S, им будет замечательно. А так ни DS37 ни обе варианта Блюхи не будут нормально работать на 1S (судя по их спецификации)
Понизить очень просто с помощью Mini DC-DC конвертера (на выходе DC 1.0V-17V)
не могли бы взвесить его?
не могли бы взвесить его?
Адександр, он еще пока в процессе доставки. Как только приедет ко мне, обязательно взвешу.
Кстати, доставка очень быстрая, заказал неделю назад, а он уже позавчера таможню прошел.
Мотор HP06VX
Это такой мотор?
Если регуль ХР-12А не перепрошивать эффект от установки данного мотора сильно хуже будет?
Заранее спасибо за пояснения
Кстати, попробовал (еще до экспериментов с выше описанным контроллером и мотором) заменить качалку хвостовой сервы от циклика, шарик прикрутил максимально близко к серве. Результат разочаровал - тряска хвоста.
С родной хв сервой было ок. С Блю арроу - тряска. Вернул стандартную качалку.
Это такой мотор?
Ага, он самый. Но вот тут дешевле (ссылка)
Если регуль ХР-12А не перепрошивать эффект от установки данного мотора сильно хуже будет?
Даже не пробовал непрошитый регуль юзать. Сразу же прошил для настройки гувернера.
С Блю арроу - тряска.
у меня с ней тряска на всех длинах качалки. В итоге поставил DS37
Блин, собрал-таки до конца снова свой FPV сетап на новой тушке, взамен улетевшей старой.
И обнаружил пренеприятнейшую вещь!
Оказывается новые аккумы, которыми теперь комплектуют верт - полное Г 😦
Если раньше я без проблем таскал камеру mobius помимо полного FPV комплекта, и получал минут 7 шустрого полёта. То теперь на свежих аккумах - около 5-6 минут не больше выходит.
Но это бы меня устроило, но проблема в том что аккумы не выдерживают такой нагрузки и в конце полёта надуваются гады!
Что делать? Есть хорошие аккумы на примете у кого? Наньше стоковые были просто супер-аккумы!
Нанотеки - покупал - вообще не тянут, елееее еле и через полгода сдохли.
Оказывается новые аккумы, которыми теперь комплектуют верт - полное Г
О! Вы тоже это заметили! Я тут недавно прикупил на замену старым вот такие они мне тоже показались хуже по тяге и по емкости. Но я грешил, что это мне только кажется всвязи с появившейся у меня 450-кой. + я еще мотор СПИН от Экстрим воткнул и регуль ХР-12А, думал еще что такой сетап батарее тянуть тяжелее (регуль, мотор и контакты греются) - вернул штатный мотор - тоже дохло… Про нанотеки - молчу. это г… пробовал…
И дуться тоже на 3 цикле начали!!! не сильно правда, но сам факт настораживает.
И дуться тоже на 3 цикле начали!!! не сильно правда, но сам факт настораживает.
Не, если дуются - сразу в помойку… Значит не тянут по току.