Этот непонятный VBar / Optimizer

И где такой вопрос, не вижу? Два раза перечитал…
Есть управляющий сигнал - угол цикла, есть цель- угловая скорость. Задача фбл получить нужную угловую скорость. Если угловая скорость реальная отличается от требуемой, фбл наращивает управляющий сигнал пока не получит нужную угловую скорость. Темп наращивания сигнала и характер роста сигнала мы задаем настройками, так же мы задаем нужную скорость вращения.
- Скорость вращения задается пунктом агилити/маневреность. (тут, я думаю согласны)
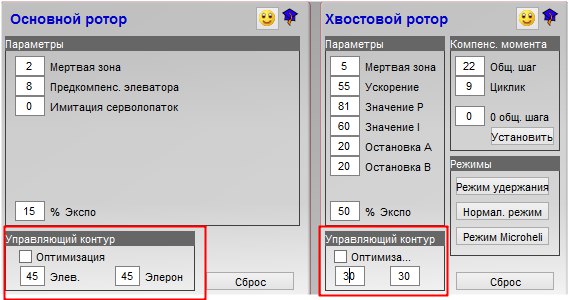
- Лимит управляющего сигнала/лимит цикла задается циклик рингом (это показано в видео)
- Я на видео показал, что оптимизатор не меняет лимит, оно и логично, потому что за это уже отвечает циклик ринг - смотри пункт 2
Так же оптимизатор не влияет на КОНЕЧНУЮ скорость вращения, так как это уже далет агилити - смотри пункт 1 - Так как это не лимит, не скорость вращения, иначе одни параметры противоречили бы друг другу, то это параметр, который отвечает за характер роста управляющего сигнала в пределах лимита для получения нужной скорости.
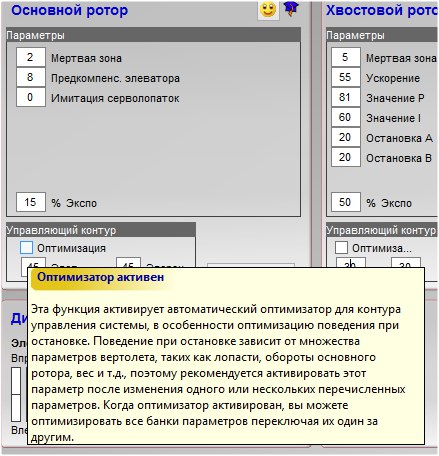
- Показал описание этого параметра, которое гласит, что этот параметр отвечает за поведение на остановке (что подтверждает пункт 3 и 4), то есть это скорость роста управляющего сигнала, которая позволяет получить качественную остановку, то есть изменение скорости угловой.
И где такой вопрос, не вижу? Два раза перечитал…
У нас с Максимом возник спор в ветке про брейн. Я говорю, что оптимизатор не задает механические лимиты углов. Он отвечает только за качество работы.
Агилити задает предел регулируемой величины, сама величина задается с ручки (угловая скорость) - ht
Сайклик ринг задает предел регулирующего воздействия (лимит цикла)
Все остальные параметры в настройках отвечают за качество работы- это параметры PID, параметры обратной связи и различные опережения, они определяют характер переходного процесса от одного значения регулируемой величины к другой
Эти параметры задают вид переходного процесса
И его качество, как быстро регулируемая величина принимает требуемое значение.

Все эти параметры являются коэффициентами передаточных функций, которые стоят в передаточных функциях: интегральной, дифференциальной и пропорциональной, которые суммируются.
Они и обозначаются как PID. Это все касаемо регулированию по отклонению регулируемой величины.
Есть метод управления по возмущению, когда мы на прямую передаем управляющий сигнал, но не знаем точно, сколько его надо. Это и есть то, когда цикл с ручки на прямую задается. Мы не знаем сколько его надо, но фигачим. А оптимизатор в вибаре как раз подбирает сколько надо его дать, а в бисте просто накручивается в ручную. Кроме того, что пришло на прямую со стика, фбл отслеживает отклонение от нужной скорости и к этому докитывает или убавляет цикл.
Как пример
Метод управления по отклонению рег. величины- гувернер в регуле, он не знает о шагах, гувер вибара имеет компенсаторы от шага (метод по возмущению). Гувер вибара реализует два метода регулирования
Метод по возмущению - компенсаторы в настройках хвоста от цикла и коллектива. Возмущение - общий шаг, мы точно не знаем сколько надо углов, чтобы скомпенсировать, крутим на глаз параметр, остальное доделывает фбл по отклонению. По возмущению выходит быстрее, но менее точно
ПОВЕДЕНИЕ ПРИ ОСТАНОВКЕ, АУ! Поведение при остановке это не скорость, это резкость.
Зачем ты сюда - остановки ещё приплёл ? Ведь ежу понятно , что чем сильнее разогнать автомобиль , тем сильнее нужно нажимать на тормоз . Однако можно рассчитать усилия и не зависимо от скорости движения , нажать на педаль и достаточно быстро остановится . А можно и на скорости 30км/ч давануть так , что бОшку об переднюю панель расшибёшь…
Тоже самое и здесь , неверно выставленный параметр оптимизатора будет излишне тормозить модель после переворота . А неправильно выставить , мы сможем только руками , потому что в автоматическом режиме , опримизатор остановится , когда модель достигнет установленной скорости переворота .
Это у вас ни логики ни аргументов. Просто нет, это не так, а почему хрен знает. Стиль это как второй винт в бисте, а с какого? Если это скорее нелинейность управления, а второй винт в бисте это как раз оптимизатор

Тоже самое что и - Style :
“Style
affects the overall response of the heli: Higher values result in a more precise feel (can be compared to a heli on a simulator), lower values result in a more vivid feel (can be compared to the feel of a flybarred heli).”
- Скорость вращения задается пунктом агилити/маневреность. (тут, я думаю согласны)
Ну об этом уже раз пять написано . )
- Лимит управляющего сигнала/лимит цикла задается циклик рингом (это показано в видео)
Спасибо Кэп , но все тоже об этом знают потому что это азы настройки механики ФБЛ систем ( видео снимать было не обязательно )
- Я на видео показал, что оптимизатор не меняет лимит, оно и логично, потому что за это уже отвечает циклик ринг - смотри пункт 2
Так же оптимизатор не влияет на КОНЕЧНУЮ скорость вращения, так как это уже далет агилити - смотри пункт 1
Твоё видео ниочём .
Циклик ринг - это механические расходы которые мы устанавливаем на этапе настройки механики и они должны быть максимально возможными.
оптимизатор влияет на КОНЕЧНУЮ скорость вращения!
Любой кто читает , может провести эксперимент :
Выставляем максимальное значение Манёвренность / Agility 120-140 . что соответствует максимальной скорости переворота . А по умолчанию в окне Оптимизатор будут значения 60-70 .
Ставим минимальное значение 20 и убираем галочку .
Можно увидеть что вертолёт будет в небе как КамАЗ
- Так как это не лимит, не скорость вращения, иначе одни параметры противоречили бы друг другу, то это параметр, который отвечает за характер роста управляющего сигнала в пределах лимита для получения нужной скорости.
Параметры - Агилити и Оптимайзер , всегда существуют вместе и зависят друг от друга и это очевидно если понаблюдать как в программе изменяются цифры оптимизатора , если изменять Агилити .
- Показал описание этого параметра, которое гласит, что этот параметр отвечает за поведение на остановке
про остановку писал выше .
Ну и дальше ты продолжаешь " Капитанить "…😒
Агилити задает предел регулируемой величины, сама величина задается с ручки (угловая скорость) - ht
Сайклик ринг задает предел регулирующего воздействия (лимит цикла)…
P/S
VBar / MICROBEAST
"Vbar’s Style similar to BeastX’s Dial #2 (cyclic feed forward): Towards vivid, there seems to be more of your stick input added to the mix while still keeping it smooth to a certain extent. Towards precise, there seems to be a very small deceleration (less feed forward) but movement is much more smooth. Remember that FBL tries to smooth out your stick movements that was previously done with the flybar.
And of course BeastX’s pitch boost (parameter H) = Vbar’s pitch pump.
BeastX’s cyclic response (parameter G) = Vbar’s paddle sim (acceleration of movement near center)."
Даа, Юрий, столько букв, что пришлось несколько раз читать, чтоб понять, что ты пытался сказать. Я понял, что тебя не переубедить. Видимо ты считаешь, что разбираешься в системах лучше всех.
На форуме лучше приводить конкретные доводы, а так больше похоже на переход на личности, без конкретных ответов. Смысл ведь в том чтобы разобраться как это реально работает 😃 а остальное не важно.
Даа, Юрий, столько букв, что пришлось несколько раз читать, чтоб понять, что ты пытался сказать.
Тавтология, словоблудие и очковтирательство …
Я думаю юноша уже начал понимать что его “несёт” …😁
з.ы. самое поганенькое , что он ничего не читает , поэтому невозможно вести диалог…
Даа, Юрий, столько букв, что пришлось несколько раз читать, чтоб понять, что ты пытался сказать. Я понял, что тебя не переубедить. Видимо ты считаешь, что разбираешься в системах лучше всех.
Видимо Минск считает, что во всем разбирается лучше все.
С моей стороны какие-то доводы, а с вашей кроме мда, это не так, ты читай выше и тд нет ничего.
Причем, я расписал все по пунктам. Никаких аргументов не было, но при этом я все равно не прав. Отлично у вас выходит.
Поехали дальше
И там управляющий контур и там, да и оптимизатор есть.
Не наводит на мысли. Давайте почитаем описание.
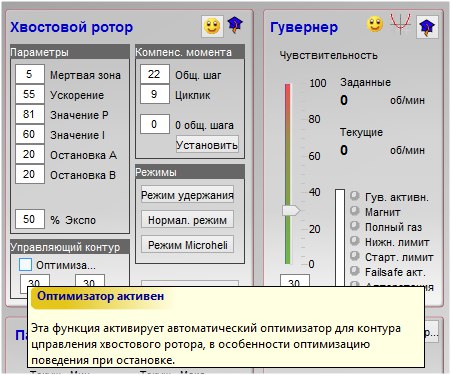
Оба этих оптимизатора отвечают за остановку.
Что наводит на мысли, что работают они одинаково
Читаем описание хвостового оптимизатора, который я привел в первом сообщении.
"
Tail optimizer
When you give any kind of tail stick input we will have a better overall response if the system knows how much throw should be approximately set for the rate you want to achieve. This will be much faster than the control loop can do. This has also effects for a negative acceleration (deceleration)—especially a tail stop."
Перевожу как могу.
Когда управляем стиком хвостом мы получим лучший отклик если система знает на сколько сильный должен быть примерный бросок (опережение как я понимаю) чтобы получить нужную скорость. Это намного быстрее, чем управляющий контур может. Это так же имеет эффект для торможения - остановки хвоста
Все сходится с той теорией, которую я описываю. Это прямой ввод угла со стика в обход контура управления, это значение подбирается оптимизатором. Оно позволяет быстро набрать нужную скорость и быстро останавливать.
Я не говорю, что разбираюсь лучше всех. Но я аргументирую свои слова. Кроме того я проходил курс по системам управления в институте и имею представление о их работе, о том, что там внутри происходит, что мне помогает понимать.
Думаю, что люди, которые умеют мыслить логически все поняли, если кто не понял, то здесь ничто не поможет.
Никаких вразумительных доводов я не услышал. Сам же разложил по полочкам и показал официальное описание функций. Один скрин с подсказкой, которая говорит, что оптимизатор отвечает за отсановку является прямым доказательством, но почему-то это игнорируется. Одного его достаточно, чтобы решить этот попрос. Специально по русски написали. Тыкай мышкой и читай
Связь с агилити тоже понятна. Чем больше маневренность, тем больше нужно опережение, чтобы быстро получить эту маневренность. Иначе скорость будет набираться медленно.
Причем, я расписал все по пунктам. Никаких аргументов не было
Видимо аргументами считается бестолковое видео и вытянутое из тырнета описания PID регулятора …?
Но к сожалению всё мимо .
Поехали дальше
И там управляющий контур и там, да и оптимизатор есть.
Оба этих оптимизатора отвечают за остановку.
Очередной раз хочется призвать Юру начинать думать
Если есть скорость и она отличается , тогда и торможение будет отличатся , это само собой разумеется :
Зачем ты сюда - остановки ещё приплёл ? Ведь ежу понятно , что чем сильнее разогнать автомобиль , тем сильнее нужно нажимать на тормоз . Однако можно рассчитать усилия и не зависимо от скорости движения , нажать на педаль и достаточно быстро остановится . А можно и на скорости 30км/ч давануть так , что бОшку об переднюю панель расшибёшь…
Тоже самое и здесь , неверно выставленный параметр оптимизатора будет излишне тормозить модель после переворота . А неправильно выставить , мы сможем только руками , потому что в автоматическом режиме , опримизатор остановится , когда модель достигнет установленной скорости переворота .
З.Ы. если поставить Агилити 90 ( дефолт) а Оптимизатор вбить руками 70 и отключить (убрать галку) , тогда при перевороте , на остановках получим отскок , качающеюся балку .
Почему ? Да потому что допустим Агилити 90 соответствует 360 гр/с( цифры из головы) , а оптимизатор 70 , соответствует агилити 140 пусть 540 гр/с . Вот и получится , что торможение будет , с большим усилием в противоход и по этой причине и возникнет колебание балки , что сообщит пилоту , о неудовлетворительной настройке .
По этой причине в других системах и приходится долго настраивать вертолёт , ведь сколько сообщений об отскоках при остановках на переворотах и этот процесс настройки может затянутся , потому что очень многое зависит от ; оборотов , лопастей и п.р.
Я могу продемонстрировать банки своего вертолёта , при одинаковых углах коллектива, одинаковый Циклик Ринг , вес , и прочие … но даже с одинаковым Агилити , но на разных оборотах , значения Оптимизатора отличаются .
Вот теперь, Юра, я тебя понял, что ты хотел сказать. И считаю, что ты прав и в то же время твоя теория не совсем сходится с практикой. Ведь если уменьшить оптимизатор, то угловая скорость вращения тоже уменьшается, а не ТОЛЬКО остановка вращения становится вялой. И наоборот - если увеличивать оптимизатор, то скорость вращения увеличивается.
Видимо Минск считает, что во всем разбирается лучше все.
Не стОит обобщать , Минск считает что во многом лучше разбирается чем Mr.Miron причём не первый раз …😉
Ведь если уменьшить оптимизатор, то угловая скорость вращения тоже уменьшается, а не ТОЛЬКО остановка вращения становится вялой. И наоборот - если увеличивать оптимизатор, то скорость вращения увеличивается.
Если долго в упор держать то все равно будет меньше? То есть при постоянном вращении
Если долго в упор держать то все равно будет меньше? То есть при постоянном вращении
Как бы не держать , хоть час - скорость будет меньше .
Пусть кто хочет проверит и тогда будет видно наглядно :
Выставляем максимальное значение Манёвренность / Agility 120-140 . что соответствует максимальной скорости переворота . А по умолчанию в окне Оптимизатор будут значения 60-70 .
Ставим минимальное значение 20 и убираем галочку .
Можно увидеть что вертолёт будет в небе как КамАЗ
… А потом можно поставить галочку в окне "оптимизатор " поставить следующий аккумулятор , и опять начать кувыркать модель .
Будете видеть как увеличивается скорость переворота ( а если есть VBC , или блютуз ) можно наблюдать как увеличивается цифра оптимизатора .
Да что тут объяснять?.. На практике испытано! Вот и у 3Daemon видно, что после увеличения оптимизатора, скорость вращения увеличилась, а не остановки стали резче (как Юре хотелось бы). И не надо тут говорить, что доказательств нету. Доказано практикой!
На практике испытано! Вот и у 3Daemon видно, что после увеличения оптимизатора, скорость вращения увеличилась,
Хаха)
Я не вижу чтобы она увеличилась. Опыт еще правильно поставить надо. Надо на месте постоянно вращаться, тогда видно изменилась или нет скорость. Там старт более быстрый и кажется, что скорость вращения быстрее.
Скорость вращения больше, чем агилити не будет. Или агилити просто так прикрутили?) Так ползунок для красоты
О! а у меня видео на эту тему как раз есть!
Циклик 58-58 (авто, прога ставит половину от Agility)
Игорь, без обид. По половинкам флипа не получается конкретного вывода сделать. Нужно висеть в точке и постоянно крутить, тогда видно. Нужно сравнивать то место, где уже набрана конечная скорость, а у тут старт и остановка близко, они общую картину смазывают
А ты попробуй и расскажешь, если сам не веришь.
А ты попробуй и расскажешь, если сам не веришь.
У меня не стоит вибар или кабар, он снят давно. Я уже пробовал
как Юре хотелось бы
Это не как Юре хотелось бы, а как производителем написано
За конечную скорость вращения отвечает агилити .
Вам что трудно просто покрутиться три-четыре флипа в одном месте? Если вы правы то вперед, видео в студию.
Ваши утверждения нелогичны. Скорость вращения будет ограничена агалити. Все ваши опыты неправильны
Нужно сравнивать то место, где уже набрана конечная скорость,
Ну сейчас “Юрия Эксперта” понесёт ещё дальше .
У него скорость начнет меняться от времени исполнения переворота , т.е получается что необходимую скорость переворота ФБЛ обеспечит спустя время ? А сколько нужно вращать вертолёт , чтобы выйти на максимум ?😒
Простите за вставление 5 копеек, но речь в описании оптимайзера идет об установлении параметра именно ускорения. Теорию развивать не буду, но в алгоритме любой управляющей системы с обратной связью заложено использование отслеживания ошибки по положению. И точность отработки зависит от использования коррекции по скорости (производной положения) и ускорения (производной скорости). Без учета этих поправок система будет или проскакивать нужную точку (без сигнала “снижай скорость, скоро остановка”) … упс, проехали или быть оооочень мееедленнной (еще не приехали, а уже надо в другую сторону…). Ну это лирика.
А в описании нет ни слова про лимиты, это корректировка коэффициента ускорения по обратной связи, типа “барин хочет стартовать и оттармаживаться быстро или неспеша, штоб сразу знать”: художественный перевод из первого поста:
“Когда вы делаете какое либо движение стиком, то будет лучший общий отклик, если система будет заранее знать, насколько большим должна быть установлена величина ускорения, которую вы хотите достичь. Это будет работать намного быстрее, чем может это сделать сам контур управления. Этим можно также вызвать эффект отрицательного ускорения (замедления ), особенно на остановке хвоста.
Оптимизатор оценит использованную величину ускорения чтобы автоматически получить хорошую остановку в полете. Перед этим включите оптимайзер, сделайте полет с некоторыми пируэтами влево / вправо и с остановками.
Если вы получите высокое значение как результат (80 или более) и поведение недостаточно резкой остановки, то необходимо будет доработать что-то на хвосте. Возможными причинами высоких значений может быть слишком маленькие обороты головы, слишком короткие хвостовые лопасти, слишком маленькая скорость движения слайдера (прим.- имеется ввиду из-за плеча сервы?) - или даже слишком большая (это приведет к потере скорости остановки) . Попробуйте первоначально установить меньшие или большие величины ускорения , здесь можно использовать переключатели режимов, потому что параметры хвоста могуть быть установлены индивидуально на каждый переключатель режимов.”
З.Ы.
Юрий Миронов - прекращай писать ерунду , вырубай “броню” и ступай в поле и понаблюдай предментно как работает Агилити и Оптимизации !
Это я и пытаюсь донести…
Да что тут объяснять?.. На практике испытано! Вот и у 3Daemon видно, что после увеличения оптимизатора, скорость вращения увеличилась, а не остановки стали резче (как Юре хотелось бы). И не надо тут говорить, что доказательств нету. Доказано практикой!
Разве скорость вращения задается не шагом? а шаг задается не напрямую наклоном тарелки - наклоном стика?