BAIT BOAT для рыбалки

У меня на валу 15,6 ватта и 1,8 Кг тяги. 1 ватт создаёт тягу в 0,115 Кг. У Владимира 11,6 ватта дают 0,25 Кг отсюда 1 ватт создаёт тягу в 0,022 Кг.
а кто как мерял тягу??? вот основной вопрос!
все делают замеры по разному, одни в ведре другие в ванной, я на болоте.😒
У одних такой движок - у других другой, у меня винт вот такой - а у меня приблизительно такой!😢😢😢
Вам поужинать пора а Вы тут дискусии разводите
Сытый голодному не товарищ. Спасибо за заботу.
А может быть просто покрыть (окунуть) в жидкий лак? По идее лак должен залить все неровности и будет как полированный.
Когда-то я сам отливал из алюминия ручку для подводного ружья. Нормально получалось.
Олег у Вас отличные винты, не надо их портить, не те скорости)
Вы не могли бы замерять тягу в горизонтальной плоскости и чтобы до ближайшего объекта (стенки ванны) было хотя бы сантиметров 20-40 чтобы поток от винта успевал рассеивается.
Ясное дело, что при увеличении оборотов упор будет расти, но на ходу будет резко падать КПД винта из-за проскальзывания.
Ошибка принципиальная в том что у вас максимальный упор получен при КПД винта = 0% те в статике, когда винт не создает ни какого полезного движения при этом скольжение лопастей = 100%, потому что отсутствует поступательное движение, испытание происходит “на швартовых”…
При движении же, появится еще и набегающий встречный поток, который снизит сопротивление вращению и благодаря чему увеличатся и обороты на валу, за каждый оборот будит происходить поступательное движение те уменьшится скольжение и КПД станет отличаться от 0%, в идеале при движении кораблика скольжение лопастей должно составлять 15-25% если меньше, значит велик запас мощности, шаг маловат и мы зря месим воду не вместо того чтобы толкать катер вперед, если скольжение больше значит корпус уже тяжеловат для этого “пропеллера”.
Ну очень с натягом верится мне про упор в 1,8 кг.
Вполне реальная тяга.
У него винт с соотношением P/D=0,8, а у Vlad155 P/D=1,4.
Т.е. такие винты практически не работают на швартовых, только перегружают двигатель. На режим они выходят, начиная с какой то скорости судна.
Конечно при условии достаточной мощности двигателя.
Для тихоходных посудин, тем более не отличающихся хорошей гидродинамикой, P/D желателен меньше 1, лучше близко к 0,5-0,6.
А почему Вы берете RS-555PC или RS-555VC а не RS 555PH-3255. ???
Почему? Да потому, что именно этот двигатель позволяет объяснить то, что мы увидели и услышали. Был бы более мощной, была бы иная картина.
Все эти споры не к чему не приводят. Так как не Вы и не Я не обглодаем нужными знаниями в полном объеме.
Возможно если Вы снимите кино для нас то все станет на свои места, и вопросов больше не возникнет. Если не трудно конечно.
Я вовсе ни о чём не спорю, а высказываю свою т.з. и говорю только о зафиксированных фактах. Поверьте, нет никакого смысла что-то придумывать, как это звучит у Вас между строк - всё рано или поздно раскрывается. Могу в чём-то ошибиться. Для того и выкладываю здесь инфо чтобы услышать критику по-существу чтобы не ходить по уже кем-то пройдённым граблям. К тому же я достаточно подробно излагаю как я провожу те или иные измерения, т.ч. любой может при желании их повторить.
Вот вчера у меня модуль GPS M8N увидел на окне в какой-то момент 23 спутника. Зафиксировал 9 GPS и 6 Глонас. Могу смело сказать, что на сегодня это лучшие модули для системы автопилота. Они кроме GPS и Глонас, рассчитаны и на не запущенные ещё европейскую и китайскую систему, т.ч. качество позиционирования будет только улучшаться.
Сейчас я занят подключением электроники к планшету. Через USB всё работает, а вот с модемами не получается пока, но я думаю что это из-за того, что эти модемы не понимают протокол MAVlink. Заказал другие и тоже на 0,5W, но из серии 3DR. Думаю, что эта инфо тоже будет кому-то полезна и он не наступит на грабли стоимостью 76$ 😃
Кино я обязательно сниму, когда дойдёт дело до большой воды, а пока я занят другим и к тому же уже разобрал макет для снятия характеристик винта, а собирать всё по новой как-то лениво, да и смысла для себя не вижу, т.к. убедился в правильности расчётов.
Ошибка принципиальная в том что у вас максимальный упор получен при КПД винта = 0% те в статике, когда винт не создает ни какого полезного движения при этом скольжение лопастей = 100%, потому что отсутствует поступательное движение, испытание происходит “на швартовых”…
При движении же, появится еще и набегающий встречный поток, который снизит сопротивление вращению и благодаря чему увеличатся и обороты на валу, за каждый оборот будит происходить поступательное движение те уменьшится скольжение и КПД станет отличаться от 0%, в идеале при движении кораблика скольжение лопастей должно составлять 15-25% если меньше, значит велик запас мощности, шаг маловат и мы зря месим воду не вместо того чтобы толкать катер вперед, если скольжение больше значит корпус уже тяжеловат для этого “пропеллера”.
Поясните пожалуйста в чём принципиальная ошибка? Мне кажется, что именно это я и написал 😃 Я считал винт на К=0,7 и закладывал скорость 2 м/сек. Сколько получится на самом деле понятия не имею, т.к. не знаю как считать мореходность своей конструкции из труб, даже аналогов корпуса подобрать не смог, разве что подводные лодки в надводном положении. Тяга на скорости в 2 м/сек должна быть порядка 0,7 Кг. Я собственно подбирал пару винт-двигатель, исходя из того, что лодка будет двигаться со скоростью 2 м/сек. Что получится на самом деле, покажут реальные испытания. Если реальная скорость окажется значительно меньше, то придётся снизить обороты чтобы действительно не месить зря воду и напрасно не тратить энергию аккумуляторов. Я вижу это так.
Олег у Вас отличные винты, не надо их портить, не те скорости)
Вы не могли бы замерять тягу в горизонтальной плоскости и чтобы до ближайшего объекта (стенки ванны) было хотя бы сантиметров 20-40 чтобы поток от винта успевал рассеивается.
Горизонтально пока не могу, т.к. ещё не готовы гондолы, а мочить двигатель как-то не очень хочется. У меня движители вообще вынесены из корпуса. Они помещены в гондолы и вместо дейдвуда я сделал магнитную муфту. Гондолы крепятся к судну снизу на кронштейнах.
Сытый голодному не товарищ. Спасибо за заботу.
Андрей, посмотри может сгодится? ru.aliexpress.com/item/…/1982181075.html
Ошибка принципиальная в том что у вас максимальный упор получен при КПД винта = 0% те в статике, когда винт не создает ни какого полезного движения при этом скольжение лопастей = 100%, потому что отсутствует поступательное движение, испытание происходит “на швартовых”…
Я думаю, что Вы здесь не совсем правы, т.к. КПД винта не равен нулю - он совершает работу по созданию тяги.
Андрей, посмотри может сгодится? ru.aliexpress.com/item/…/1982181075.html
Не совсем подходит, т.к. большие обороты и маленький момент. Если и использовать, то только с редуктором 1:3, тогда параметры будут более соответствовать требуемым нашим корабликам.
Почему все так избегают использовать редукторы, хотя совершенно очевидно, что с ними при использовании двигателей с 10.000-12.000 об/мин можно получить оптимальный режим работы винта? Есть простая формула, которая показывает зависимость между скоростью лодки, шагом винта и оборотами винта. N (об/сек) = V:[P х (0,7-0,75)], где N - обороты винта, V - скорость лодки, P - шаг винта в метрах, 0,7-0,75 - коэффициент проскальзывания. Простой пример - скорость лодки 2 метра в сек., шаг винта - 0,05 метра. Отсюда N = 2 : (0,05х0,7) = 57 об/сек или 57х60 = 3428 об/мин. В зависимости от диаметра винта считается мощность двигателя. Там сложнее, но примерно можно принять, что нам нужны при наших габаритах и весе корабликов следующие параметры винта и двигателя - D винта = 50-60 мм, мощность на валу винта = 15-20 ватт или момент 32-45 mNm. Отсюда электрическая мощность двигателя равна 15-20 ватт разделить на КПД двигателя (0,6-0,65). Получается P дв. = (15-20):0,65 = 23 - 31 ватт. Всё остальное избыточно. Не забываем про потери в дейдвуде и прибавляем к полученной мощности двигателя ещё 6-8 ватт, а так же потери при ХХ, которые тоже легко считаются. Чем меньше обороты двигателя, тем меньше потери от ХХ. Реальные суммарные потери равны току двигателя умноженному на напряжение при холостых оборотах винта на воздухе. С редуктором можно применять более оборотистые и менее мощные двигатели. Да и винты нам нужны не от скоростных моделей и с небольшим шагом. Если всё это учесть, то с одной зарядки аккумуляторов можно будет проплыть в 1,5-2 раза большее расстояние.
Я никого ни за что не агитирую, а просто показываю как правильно подобрать пару винт-двигатель.
Андрей, посмотри может сгодится?
Да спасибо большое, это то что нужно.
Не совсем подходит, т.к. большие обороты и маленький момент.
Для моей задачи даже очень.
маленький момент.
Маленький крутящий момент??? А как Вы это поняли???
как это звучит у Вас между строк
Я не уверен что нужно читать между строк. Если я что то пишу то я пишу прямо и без скрытого смысла. А видио я попросил у Вас для тог что бы понять как Вы проверяли тягу и чем. И поверьте никакого сарказма с мой стороны.
Попался мне на глаза движок от фирмы Pittman. Движок - GM9434G105 - имеет редуктор 5.9 : 1
На холостых оборотах потребляет около 200 мА, или 0.2 А. При попытке притормозить вал, около 2 ампер.
Померил обороты ХХ. Без редуктора около 6000 от 12 вольт. Хочу запользовать в своей лодке.
Один момент меня беспокоит: редуктор сделан как часть двигателя. Полностью избавиться от него я не могу.
Вопрос в том, стоит ли удалить внутренности редуктора, дабы не было лишней нагрузки на вал?
Или плюнуть и использовать как есть?
К дейдвуду буду крепить за свободный конец вала, предназначенный для энкодера.
Померил обороты ХХ
А как промеряли прибором или как то еще??? Просто почему спрашиваю не охота покупать прибор для разового замера.
Скидал тахометр на основе ардуино и оптического (щелевого) концевика.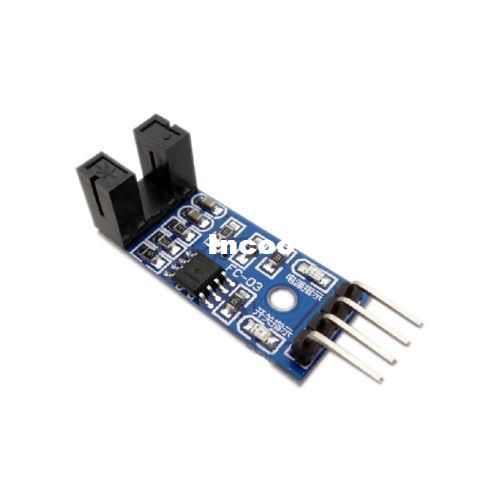
На вал мотора посадил пластиковый лепесток, который проходя через щель концевика заставляет ардуину считать. Сей час у меня на лодке стоит двигатель “Мабуши”. У него 8500 об/мин паспортная чв. Думаю поменять на выше указанный.
кидал тахометр на основе ардуино и оптического (щелевого) концевика.
Спасибо.
Замерил ток при остановленном плоскогубцами вале двигателя. Получил 4 ампера.
не охота покупать прибор для разового замера.
Андрей ,уменя есть тахометр оптический , могу отдолжить на пару недель.отошлю “новой почтой”.
Андрей ,уменя есть тахометр оптический
Я Вам в личку написал.
Какой рег выбрать.
ru.aliexpress.com/item/…/1978064828.html
ru.aliexpress.com/item/…/1801827846.html
ru.aliexpress.com/item/…/32303179124.html
ru.aliexpress.com/item/…/2048698200.html
ru.aliexpress.com/item/…/685294318.html
Андрей ,уменя есть тахометр оптический , могу отдолжить на пару недель.отошлю “новой почтой”.
У меня есть ближе и отсылать не надо 😃
У меня есть ближе и отсылать не надо
???
Какой рег выбрать.
Первая ссылка самое то.