Arduino для BAIT BOAT...

Можете питать его как вам нравится. Важно чтобы питание самого АРМ было стабильным и не “шумело”.
У меня АРМ питается от модуля, собранного по совету Алексея Козина ( можете найти в разделе коптеров), подключенному во второй выход АРМ. Сервы записаны от стандартного АРМ модуля, который к тому же служит для замеров тока и напряжения.
подключенному во второй выход АРМ
Это куда? Сюда (на фото)?
Да.
Добрый день. Подключил, руль (первый канал) и движок (3 канал) работают! Свет (свитч) на втором канале почему то не отключается . Бункер на 6 канале не работает. Вычитал: “На остальные сервомашинки и свичи в мишн планнере нужно поменять значение Function” - это где находится в МП? Спасибо.
Отвечаю сам себе.
Зашёл Full Parametr Tree и в параметре RC6_FUNCTION выставил 1, нажал Write Params (сохранение)
Здесь RC6 - 6 канал
С вкл/выкл света вопрос остался.
Появился ещё один - МП нужно указывать, что у меня соединение приёмник/АПМ - PPM ?
В первое гнездо “input” подключаете ppm, на второе и третье одеваете перемычку.
Это по поводу подключения. В МР, честно говоря - уже не помню… 😦
Подключен Power Module, в МП видно напряжение аккумулятора, а показания амперметра непонятные. Можно использовать токовый датчик для отображения текущего тока?
В первое гнездо “input” подключаете ppm, на второе и третье одеваете перемычку.
Это всё сделано. По свету на втором канале, как его настроить, например, движение стика вправо - свет включен, стик влево - свет выключен (у меня всегда включен).
Да, похоже вид подключения указывать не надо. Полётные режимы на пульте настроились и переключаются, а в МП нет. Я так думаю, для каждого режима нужно настраивать числовые значения справа внизу при настройке полётных режимов (FlySky i6S)
FlySky i6s
(.
Добрый день. Опять вопрос. Как переключаются режимы у этого контролёра? Садил на стик (2 канал), на переключатель, попробовал включить через Server Test (фото). Ну не управляется и всё. Контролёров у меня 2 вида - один простой (вкл/Выкл) и второй такой (вбить в поиск на Али): 32742674975. Что не так делаю?
Этот вопрос остался: “Подключен Power Module, в МП видно напряжение аккумулятора, а показания амперметра непонятные. Можно использовать токовый датчик для отображения текущего тока?”
С полётными режимами разобрался.
Поставил в PWM . Свет на 2 канал (приёмник 2 - APM IN 2 - APM OUT 2), режимы света начали переключаться движением стика вверх от середины. Горит постоянно - моргает редко - моргает чаще - выключен. Пришлось поменять вращение двигателя и изменить канал в аппе для “fly mode” с 8 на 5. А в МП 8 канал так и остался. Доволен как слон! Теперь это мучает: подключен Power Module, в МП видно напряжение аккумулятора, а показания амперметра непонятные. Можно использовать токовый датчик для отображения текущего тока в реальном времени?
Добрый день. Нужна помощь. Fail-Safe не работает. В МП всё как надо - при вытаскивании батарейки (FlySky i6S) значение по 3 каналу - 900. В настройках Fail-Safe пробовал от 910 до 950. RTL работает. Как будто этот режим заблокирован. И ещё вижу, что в режиме Learning не запоминает точки ни в МП, ни в DroidPlanner, в аппе поставил на 6 канал - SWD (изначально стояло на 4 канал), соединение 6 канал приёмника на 7 канал АПМ - это правильно?. GPS нормально работает. Что не так?
Добрый день. Нужна помощь. Fail-Safe не работает. В МП всё как надо - при вытаскивании батарейки (FlySky i6S) значение по 3 каналу - 900. В настройках Fail-Safe пробовал от 910 до 950. RTL работает. Как будто этот режим заблокирован. И ещё вижу, что в режиме Learning не запоминает точки ни в МП, ни в DroidPlanner, в аппе поставил на 6 канал - SWD (изначально стояло на 4 канал), соединение 6 канал приёмника на 7 канал АПМ - это правильно?. GPS нормально работает. Что не так?
Я Вам посоветую писать в ветку коптерщиков.
Сдесь мало кто знаком с APM
8 вход mode, 7 вход как раз для записи точки. Подключено все верно. В мп проверьте работу свитча по 7 каналу, если необходимо откалибруте. Скоррее всего дело как раз в том что команда на запись происходит при некой шим период которой указан в настройках, в мп его видно. Нужно чтоб сигнал с приемника попадал как раз в это число ± некоторое небольшое значение.
Я Вам посоветую писать в ветку коптерщиков.
А там отправят создавать свою ветку, поскольку там с Ровером незнакомы.😃
Сдесь мало кто знаком с APM
Вполне хватает, просто не хотят повторять опыт веток из коптерного и авиационного разделов, которые раздуты от одних и тех же вопросов, большая часть которых не имеет отношения к самому АРМ.
Тем более вряд ли найдутся желающие помогать, когда человек не может нормально сформулировать свои проблемы.
Нужна помощь…
Так Вы сначала спокойно опишите, что у Вас собрано, как настроено, а потом с чем проблема.
Догадываться что там у Вас происходит, по Вашим лихорадочным сообщениям, и разгребать этот бурный поток сознания вряд ли кто будет.
Только не валите всё в кучу: проблемы настройки пердатчиков и приемников РУ, сервомеханизмов, ESC и т.д.
Это все расписано в соответствующих разделах по аппаратуре радиоуправления. Здесь только по проблемам самого АП.
Информация по АРМ находится в архиве проекта. (подключение, питание) Всё остальные настройки из общего раздела по ArduRover. В таблицах команд и настроек параметров есть примечания, на какие версии АП они распространяются.
…в режиме Learning не запоминает точки ни в МП…
А с чего Вы так решили?
Как проверяли?
Добрый день. Нужна помощь. Fail-Safe не работает. В МП всё как надо - при вытаскивании батарейки (FlySky i6S) значение по 3 каналу - 900. В настройках Fail-Safe пробовал от 910 до 950. RTL работает. Как будто этот режим заблокирован. И ещё вижу, что в режиме Learning не запоминает точки ни в МП, ни в DroidPlanner, в аппе поставил на 6 канал - SWD (изначально стояло на 4 канал), соединение 6 канал приёмника на 7 канал АПМ - это правильно?. GPS нормально работает. Что не так?
А какой приёмник используете?
Я Вам посоветую писать в ветку коптерщиков.
Да, помогли. параметр FS_ACTION стоял в HOLD, поставил в RTL. Заработало.
В МП в Radio Calibration по 7 каналу - от меня 1000, переключатель на меня 2000. Больше ведь ничего не указывается.
Скоррее всего дело как раз в том что команда на запись происходит при некой шим период которой указан в настройках, в мп его видно
А где в МП видно?
А с чего Вы так решили? Как проверяли?
А разве в окне Flight Data чуть выше строки состояния GPS они не должны появляться? Поправьте, если не так. В программе на сотовом DroidPlanner их тоже не видно (список WP).
А какой приёмник используете?
FS-i6S + FS-iA6B
опишите, что у Вас собрано, как настроено


Подключение АПМ:
Серва руля 1(Приёмник) 1(АПМ IN) 1 (АПМ OUT)
Свет правый стик вперёд 2 - 2 - 2
Газ 3 - 3 - 3
Бункер 4 - 4 - 4
Выбор режима SWA +SWB 5 - 8 -
Запоминание точек SWD 6 - 7 -
НЕ могу найти: “If you’re connected to the Mission Planner, you can click Read WPs on the Flight Planner screen and it will show the recorded waypoints on a map.”
Нашёл вроде 3 параметра, отвечающих за запись точек, я эту функцию хочу повесить на 4 канал.
CH7_OPTION нужно выставить 1, SERVO4_FUNCTION - если 0, то используется для миссий (вроде так - Function assigned to this servo. Seeing this to Disabled(0) will setup this output for control by auto missions or MAVLink servo set commands. any other value will enable the corresponding function). Что означает параметр под Value 1 - PCPassThru. И нужно (по подсказке alexeykozin) выставить SERVO4_MIN и SERVO4_MAX. Что должно стоять не знаю. Попробую подбирать.
НЕ могу найти: “If you’re connected to the Mission Planner, you can click Read WPs on the Flight Planner screen and it will show the recorded waypoints on a map”, как и где отслеживать запись точек.
Вот этот ещё параметр имеет отношение к 4 каналу, что тут должно быть не знаю: RCMAP_YAW
Note: This parameter is for advanced users
Yaw channel number. This is useful when you have a RC transmitter that can’t change the channel order easily. Yaw (also known as rudder) is normally on channel 4, but you can move it to any channel with this parameter. Reboot is required for changes to take effect.
Range 1-8, по умолчанию стоит 1
А разве в окне Flight Data чуть выше строки состояния GPS они не должны появляться?
Кто они?
Если речь о точках, сначала нужно очистить память от записи имеющихся точек/маршрутов и проверить очистку.
Выполняется это в окне Flight Plan.
Там же проверяется и запись точек в АП.
Для этого, после запоминания точек, надо нажать кнопку ReadWPs.
Что означает параметр под Value 1 - PCPassThru
R CPassThru - АП будет тупо транслировать через себя этот канал со входа на выход.
С таким же успехом можно устройство подключить напрямую к этому каналу приемника, минуя АП. 😃
Только надо будет настроить FS приемника.
Если речь о точках,
Да, о них. Нашёл эту кнопку “Считать WP” , спасибо.
что тут должно быть не знаю
Первое правило: не знаешь, не трожь!!!
Оставьте его в покое, к Вашим хотелкам он не имеет отношения.
Похоже внизу окна Flight Planner…
Вы его вообще открывали?
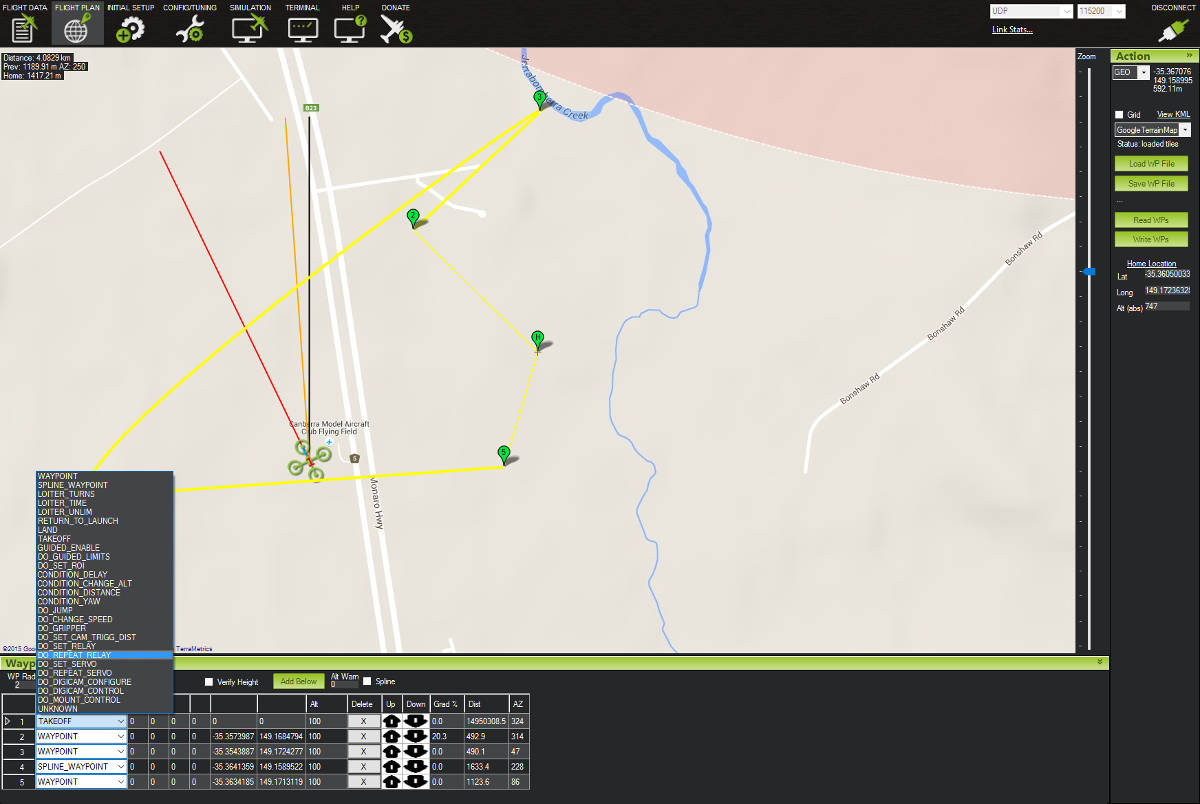
Кнопки справа от карты.
Внизу таблица точек маршрута.
сначала нужно очистить память от записи имеющихся точек/маршрутов и проверить очистку
Как это сделать? Внизу в списке WP должно быть пусто, если есть точки, убираем их - “удалить” в таблице. Так? А проверить очистку каким образом?