Автопилот Arduplane - открытое ПО

Камрады,что лучше = взять GPS+компас на 1 плате или GPS и компас на разных платах?
Камрады,что лучше = взять GPS+компас на 1 плате или GPS и компас на разных платах?
компас выносят если вблизи апм проходят силовые провода, это очень актуально для компактных мультироторов где все очень рядом.
для самоля в большинстве случаев встроенного в апм компаса выше крыши.
т.е. компас на жпс или отдельно ненужен
Забыл указать = АПМ2.6,компаса на ней НЕТ физически.
Нафиг через это OSD гнать? Это интересно исключительно получать координаты GPS для поворотной антенны. Для этого дикие скорости не нужны.
Просто по умолчанию на порт с осд сыпется телеметрия с нужной скоростью и выбранные параметры.
И порт можно настраивать.
А вот можно ли заставить сериал 0 работать на мелкой скорости и указать какие именно параметры передавать я не знаю.
Запилил себе приемник воздушного давления. Ибо от ценника на 3d и DIY слегка поплохело, впридачу, они еще и за доставку изрядно накидывают. Датчик заказал на ибее, а приемник сегодня сколхозил сам. Материал - китайская телескопическая антенна за 40 рублев. Сложнее всего было припаять трубку отбора статики и сверлить дырдочки 1 мм поперек трубы в условиях “на подоконнике”.

Сложнее всего было припаять трубку отбора статики
А я кстати не очень понимаю, если статика, то почему просто не вывести эту трубку внутри фюзеляжа ? Это же вроде не статика, а по закону бернулли там разряжение будет.
Сорри за офтоп.
почему просто не вывести эту трубку внутри фюзеляжа ?
В фюзеляже имеется изрядное количество отверстий, сечением куда больше квадратного миллиметра, туда может как наддувать, так и создаваться разрежение. Конечно, на самом деле так и следовало бы сделать, но мне захотелось, чтобы все “как у взрослых”, с обогревом, правда , не получилось. Влияние эффекта Бернулли на давление в статике будет пренебрежительно мало. В любом случае, APM откалибрует значение истинной ( воздушной) скорости по данным GPS, считая, что истинная и путевая скорости на небольшой высоте одинаковы. 😃
Вот интересно, в программе АПМ заложен расчет навигационного треугольника скоростей?
В фюзеляже имеется изрядное количество отверстий, сечением куда больше квадратного миллиметра, туда может как наддувать, так и создаваться разрежение. Конечно, на самом деле так и следовало бы сделать, но мне захотелось, чтобы все “как у взрослых”, с обогревом, правда , не получилось. Влияние эффекта Бернулли на давление в статике будет пренебрежительно мало. В любом случае, APM откалибрует значение истинной ( воздушной) скорости по данным GPS, считая, что истинная и путевая скорости на небольшой высоте одинаковы.
А можно подробнее про калибровку на небольшой высоте ? У меня то покупная трубка стоит, но есть ощущение что врет сильно. Почему АПМ решает что на небольшой высоте ветра нет ? Я вот как то вертикальную посадку делал на скайвокере против хорошего ветра 😃
А можно подробнее про калибровку на небольшой высоте
Про калибровку датчика ПС по GPS - мои личные измышления, основанные на прочтении данной ветки и описалова АПМ в гугле. Иначе это чудо приборостороения, как мне кажется, откалибровано быть не может. Скорее всего, берутся некие усредненные значения, уточняющиеся с каждым последующим полетом. А вот где хранятся эти самые значения, если хранятся вообще - вопрос мне самому интересный. Подробнее могу сказать только после того, как мой долгострой все-таки полетит 😃 Ну, или к разработчикам можно обратиться.
Про калибровку датчика ПС по GPS - мои личные измышления, основанные на прочтении данной ветки и описалова АПМ в гугле. Иначе это чудо приборостороения, как мне кажется, откалибровано быть не может. Скорее всего, берутся некие усредненные значения, уточняющиеся с каждым последующим полетом. А вот где хранятся эти самые значения, если хранятся вообще - вопрос мне самому интересный. Подробнее могу сказать только после того, как мой долгострой все-таки полетит Ну, или к разработчикам можно обратиться.
Я бы предположил вариант полетов кругами на одной высоте для калибровки AS, по моему более логично 😃 Не забудьте поделиться знаниями, как полетит.
Мой зимой так нормально и не полетел к сожалению, а сейчас ветра приличные, погоду жду и сухую дорогу в поле.
Не удержался, полез подключать датчик скорости к АПМ - оппа, ArduPlane 3.0.0 стал доступен среди прошивок. Надобно поковыряться.
ArduPlane 3.0.0 стал доступен среди прошивок
Насколько я понял из пресс-релиза, основные вкусняшки там для пиксхавка:(
основные вкусняшки там для пиксхавка
Но и для АПМ тоже есть кое-что:
- geofence changes
- the flaps code
- new autolanding code
Кажется порешал проблему с компасом. Хочу поделится.
Исходные данные:
Использую:
- телеметрия на 1 ватт
- 433 РУ
- MinimOSD. Запитана строго от 5 вольт (запаяны перемычки).
- APM c RCTimer
- BEC не знаю какой, но по размеру довольно здоровый.
Подключено. Через BEC подключен APM, к нему все остальное.
Телеметрия воткнута в родной 5-ти контактный порт
Приемник питается от A0 (и заодно туда RSSI выплевывает)
MinimOSD подключена 3 контактами к выходу UART вдоль длинной стороны.
Когда все включено, калибровка компаса выдает офсеты 0 0 0 или бывает 1 -1 0 (и т.д. больше 1 значений не видел). Мишин планер показывает вращение тушки (гироскопы), но компас потом встает все время в одном и том же направлении, не зависимо от положения тушки.
При отключении MinimOSD все приходит в норму, офсеты порядка 70…100 (не записал).
Запитываение MinimOSD от BEC (а НЕ через плату APM), проблему тоже решает. Компас нормально калибруется и нормально показывает.
Видимо на плате как то дорожки хитро проходят, что при большой нагрузке на боковой порт UART начинают сильно влиять на компас.
Может кому поможет.
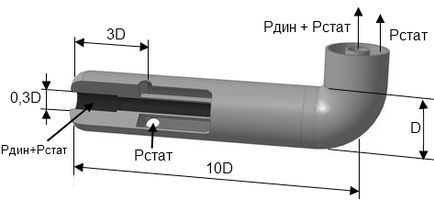
а есть ли ограничения на диаметры(сечения) для трубочек воздушного давления?
На диаметры сечения не знаю, но расстояние от носика трубки до первых дырочек статики должно быть не менее трех диаметров наружной трубки
вот такую картинку нашел отсюда
Кажется порешал проблему с компасом. Хочу поделится.
Исходные данные:
Использую:
- телеметрия на 1 ватт
- 433 РУ
- MinimOSD. Запитана строго от 5 вольт (запаяны перемычки).
- APM c RCTimer
- BEC не знаю какой, но по размеру довольно здоровый.
Подключено. Через BEC подключен APM, к нему все остальное.
Телеметрия воткнута в родной 5-ти контактный порт
Приемник питается от A0 (и заодно туда RSSI выплевывает)
MinimOSD подключена 3 контактами к выходу UART вдоль длинной стороны.Когда все включено, калибровка компаса выдает офсеты 0 0 0 или бывает 1 -1 0 (и т.д. больше 1 значений не видел). Мишин планер показывает вращение тушки (гироскопы), но компас потом встает все время в одном и том же направлении, не зависимо от положения тушки.
При отключении MinimOSD все приходит в норму, офсеты порядка 70…100 (не записал).
Запитываение MinimOSD от BEC (а НЕ через плату APM), проблему тоже решает. Компас нормально калибруется и нормально показывает.Видимо на плате как то дорожки хитро проходят, что при большой нагрузке на боковой порт UART начинают сильно влиять на компас.
Может кому поможет.
за это надо давать медаль.
от этого не только uart питается но и берет питалово (хоть и немного вся трехвольтовая цепь)

в результате потребление по 3,3 создает магнитное поле компасу,
переменное потребление - шум и отклонения
в результате потребление по 3,3 создает магнитное поле компасу,
переменное потребление - шум и отклонения
Ну по 3.3 совсем мало кушается наверное. И калибровка компаса может это учесть. А вот MinimOSD с запаяными перемычками жрет прилично судя по нагреву.
Ну по 3.3 совсем мало кушается наверное. И калибровка компаса может это учесть. А вот MinimOSD с запаяными перемычками жрет прилично судя по нагреву.
а вот это я как нить на днях и проверю
отрежу питание стаба от пина питания UART и прицеплю где нить в другом месте и посмотрю как поменяются офсеты после калибровки