Автопилот Arduplane - открытое ПО

Кстати, новая китайская OSD использует MAX7456, который:
All versions are Not Recommended for New Designs.
Так что с верой в светлое будущее, ее тоже использовать нельзя.
это кстати фигня ибо эти максы освоены китайскими клонерами. первые клоны были убогими, ужасно грелись и было очень много брака.
вроде бы сейчас ситуация нормализовалась и у китайцев процесс пошел. ктоме того был бы спрос, обычно если производитель девайсов готов заказать от 5тыщ штук завод обычно соглашается выпустить партию чипов
Ругать эту работу нельзя, можно высказывать позитивные пожелани
пока не смотрел, но обязательно загружу и погоняю втч с осцилом
надеюсь тут уже vsync уже аппаратно по прерыванию а не цикл запросов по spi?
как насчет интеграции коптерной реализации и самолетной в один исходник?
это кстати фигня ибо эти максы освоены китайскими клонерами
Да не, я так. Понимаю, что они быстро не кончатся. С другой стороны, на обоих двух OSD клонированные максы мне пришлось менять. Вторая OSD куплена в этом году. Ну уж не знаю, что провоцирует ошибку кроме температуры среды, но пропадает или OSD или все изображение.
надеюсь тут уже vsync уже аппаратно по прерыванию а не цикл запросов по spi?
Да, без SPI. Но без прерывания. А на mavlinkosd vsync подцеплен? А то может придется сделать поведение настраиваемым…
погоняю втч с осцилом
Я уже посмотрел немного.
Вверху SCK Внизу видеосигнал. Ямки в ём - vsync. Полное обновление экрана - где-то за 1200 микросекунд. Можно существенно сократить при желании.
как насчет интеграции коптерной реализации и самолетной в один исходник?
Надо сначала полноценно опубликовать самолетную прошивку. Потом можно. Но для коптерной версии мне нужно коптер или кого-то с коптером в помощь.
Как жить дальше не знаю, в три разных APM пытался влить - хрен…
Шнурок пробовали другой? У меня с тем что был в комплекте с APM тоже была какая-то страшная ошибка, пока не взял качественный шнурок от смартфона.
А где то в теме проскальзывало про V хвост. Дружит с ним апм? ткните где было?
А где то в теме проскальзывало про V хвост.
Новая версия прошивки minim osd для самолетов.
Пока в качестве дразнилки т.к. отсутствует описание, исходники не опубликовал и мало отлаживал. Кстати, подскажите, как лучше будет на тему этой прошивки общаться - завести отдельную тему или в блоге?github.com/KIrill-ka/…/MinimOSD_x2_pre0.5.zip?raw=…
Основные новшества по сравнению с MinimOSD Extra:
- синхронизация обновления экрана с видеосигналом (уже было в предыдущей моей прошивке)
- командно-строчная утилита для windows и linux с поддержкой загрузки шрифтов и конфигураций
- русский язык (вышеуказанный zip содержит только русскую версию)
- обновление данных на экране по мере поступления - то есть, например, можно увеличить частоту отсылки параметров в MAVlink и они с этой частотой и будут отображаться
- число экранов увеличено до 3
- блокировка загрузчика шрифта с помощью переменной в eeprom (как предложил Алексей Козин)
Пока все. Ругать эту работу нельзя, можно высказывать позитивные пожелания 😉
Установил прошивку и шрифты, немного настроил
Родной язык выглядит намного привлекательнее
Совместимость с графической утилитой (OSD_Config) старался сохранять, но новые параметры в ней задать нельзя.
Назревает вопрос… Тогда как задавать новые параметры?
Доброго времени суток всем!
Подскажите пожалуйста, что можно сделать в этой ситуации.
Установил Mission Planner на ноутбук, установился он криво: например на вкладке FlightData не отображается окно с горизонтом, скоростью и высотой, при калибровке компаса вообще вылетает с ошибкой “Программа будет завершена”. На стационарном ПК все работает идеально, винда одинаковая, 8. Удалял, переустанавливал, но почему-то ставит всегда в папку по умолчанию, хотя я менял путь. В итоге переустановка не помогает. Подскажите пожалуйста что можно еще попробовать сделать.
Спасибо.
Попробуйте качать zip-архивы. Они не требуют установки.
Разархивировали и запустили exe-шник Mission Planner.
Пробуйте разные версии, начиная с самой свежей.
Качать тут
firmware.diydrones.com/Tools/MissionPlanner/
мишен планеру нужен dotnet framework причем какойто определенной версии, иначе сыплются проблемы
мишен планеру нужен dotnet framework
3.5, а на восьмерке его установка это еще те танцы с бубном.
Пока все. Ругать эту работу нельзя, можно высказывать позитивные пожелания
А прикрутите, пожалуйста, на аналоговый вход Меги датчик температуры LM335z. Выводить показания можно вместо температуры самой меги. Делов на 10 минут, а многие скажут спасибо.
Я начал было этим заниматься, да по дурости спалил максимку.

Нашел самую последнюю прошивку ArduPlane с HIL тут:
firmware.diydrones.com/Plane/.../ArduPlane.hex
Можно попробовать залить ее руками через AVRDUDE
Я правильно понимаю, что во всех папках содержащих в названии “apm2-hilsensors” лежит прошивка для работы АРМ c X-Plane?
Вообще не совсем понял, что означает HIL в классификации файлов у диадроносов…
лучше тогда www.sparkfun.com/products/245
ds1820 прикрутить
“apm2-hilsensors” лежит прошивка для работы АРМ c X-Plane
HIL hardware in Loop
тоесть теоретически можно выполнять код не в атмеге а в симуляторе ее а данные посылать в симулятор самолета - это будет полная симуляция. хил это другое, HIL прошивка этокогда контроллер со специальным кодом для работы с симулятором, но вариантов было два просто хил и хил сенсорс . нюансов не помню вероятно с сенсорами задействованы какието отдельные сенсоры вживую .
HIL прошивки работают далеко не все (их не столь тщательно тестируют, во времена когда я тестил 2.6 работала одна из пяти) и точно также требуют сброса параметров
также требуют сброса параметров
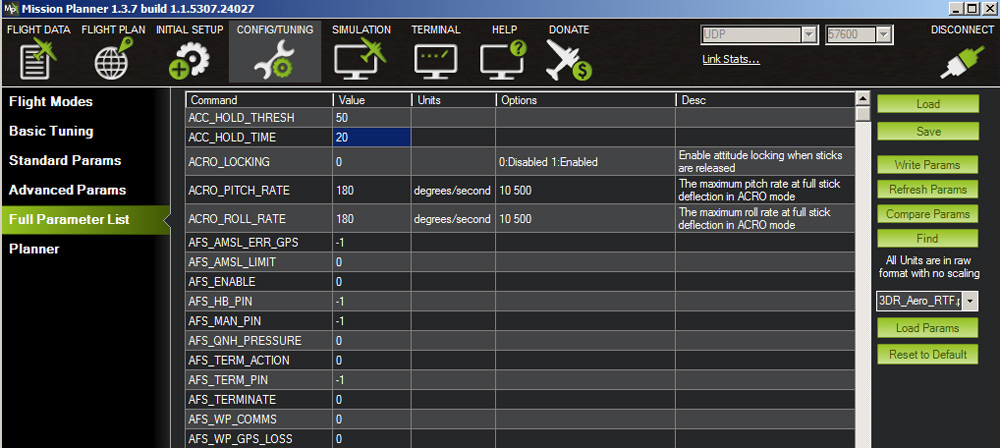
в связи с тем, что терминала давно уже нет, достаточно ли для сброса всего APM в дефолтное состояние нажать “Reset to default” (см. картинку), чтобы почистить весь мусор от старой прошивки?
А потом нужно все нужные параметры вручную вбить, чтоб старый мусор из сохраненного файла параметров не прошился опять?
Или этот файл параметров не принесет в новую прошивку некорректных вещей?
лучше тогда www.sparkfun.com/products/245
ds1820 прикрутить
При всей моей любви к DS18b20, не согласен. Да, точность у DS18b20 составляет пол градуса. У LM335 точность - 1 градус, и для наших целей ИМХО вполне достаточно.
Зато DS18b20 потребует гораздо больше программной памяти, чем просто аналоговое чтение и масштабирование LM335. К тому же, диагностировать аналоговый вход и аналоговый датчик несравненно легче, чем вход и датчик 1Wire. И, возможно самое главное – DS18b20 требует дебильной точности таймингов, а ведь ОСД приходится еще с видеосигналом бороться.
Подскажите плиз, где можно почитать о кастомизации прошивки под свои нужды? К примеру подача сигнала на дополнительный аналоговый выход, если самолет достиг конкретной точки (waypoint).
Там в свойствах точки есть триггер.
copter.ardupilot.com/…/mission-command-list/#Do-Se…
Сбрасывать водку вахтовикам и прочее предусмотрено 😃
Или этот файл параметров не принесет в новую прошивку некорректных вещей?
я не замечал
Подскажите кому не лень, как FS работает в 2.76.
Я так понимаю если режим не авто, то первый на круг уходит и по второму домой.
А если режим авто ?
Выводить показания можно вместо температуры самой меги
А оно и не выводит температуры “самой меги”. И в 10 минут я с вашей задачей тоже не уложусь.
Подскажите пожалуйста по такому вопросу.
Собрался прошивать minimosd, в качестве программатора использую Arduino UNO, выбрал в Arduino IDE пункт Arduino as ISP, затем выбираю записать загрузчик, после этого появляется ошибка avrdude: stk500_getsync(): not in sync: resp=0x00.
Если пробовать в конфигураторе ОСД прочитать прошивку или попробовать залить, то появляется ошибка Failed to talk to bootloader!
Порт выбран правильный, ардуино Rx и Tx контакты замыкал, данные гоняются, также таким образом прошивал Atmega 328 без каких либо проблем. А с осд что-то не получается.
Подскажите пожалуйста, что сделать можно.