MultiWii на самолете

И в догонку . В полёте , чем управляет gy-521? Я так понял, что направление рудером держит. А что ещё он контролит? Сервы элеронов и руля высоты просто дёргаются у меня
Здесь почитай www.p arkflyer.ru/blogs/view_entry/8821
Здесь почитай www.p arkflyer.ru/blogs/view_entry/8821
Так что, управление осуществляется элеронами и рудером?
Вот здесь же в таблице написано как подключать fotoflygarn.blogspot.com/2012...lane-same.html 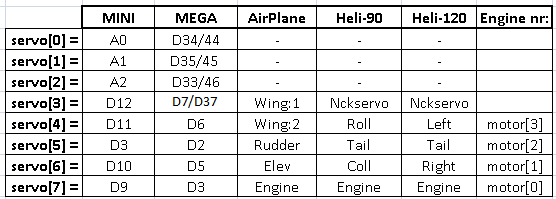 Управление идет на все органы управления
Управление идет на все органы управления
Вот здесь же в таблице написано как подключать fotoflygarn.blogspot.com/2012...lane-same.html Управление идет на все органы управления
Так и подключил. При наклоне влево/право сервы дёргаются и встают на место, хотя, мне кажется, что должны держаться в положении “выправления” до того, как самолёт не восстановит ровный полёт. Или я ошибаюсь?
И ещё, у меня почему-то все режимы горят красным (arm, angle, horizon,passtru). Как сделать их активными?
потому что у вас стоит режим акро, когда полетный контроллер управляется только гироскопами. при этом компенсируются, например, рывки от порывов ветров. для того, что бы самолет удерживал горизонт, нужно выставить режим ANGLE или HORIZON, а для этого нужно настроить переключатель полетных режимов на отдельный канал и приемник подключить на 7 контакт меги

походу мультивий вы никогда не настраивали… советую для изучения multiwiifaq.ts9.ru . пусть он для коптеров, но многое вам объяснит в настройке
Чтобы датчик не сходил с ума из-за вибраций
На электрических пенолётах основной источник вибрации - плохо сбалансированный винт (ВМГ в целом, на самом деле), поэтому, отбалансировав его “в ноль” хотя бы статически, о вибрациях, хоть сколько-нибудь заметно влияющих на работу гиродатчика, можно забыть. На паркфлаере был с месяц назад проект вибростенда для динамической балансировки ВМГ на датчике ADXL345, но это для Ваших задач оверкилл.
В полёте , чем управляет gy-521?
Датчик, по определению, ничем не управляет, он лишь сообщает системе управления о значениях измеряемых им величин, в данном случае - угловых скоростях и проекции вектора ускорения. Управляет, в данном случае, прошивка MultiWii, которая выдаёт команды сервомашинкам, формируя на соответствующих выходах необходимый PWM-сигнал, в котором задаётся положение сервы. С типовым временем цикла мультивия 3-4мс изменения ширины управляющих импульсов происходят весьма быстро. Код MultiWii на самолёте нормальной схемы “интеллектуально” управляет элеронами, рулём высоты, рулём направления и оборотами двигателя, также выдаёт сигнал на закрылки, если такой сигнал передаётся аппаратурой.
На электрических пенолётах основной источник вибрации - плохо сбалансированный винт (ВМГ в целом, на самом деле), поэтому, отбалансировав его “в ноль” хотя бы статически, о вибрациях, хоть сколько-нибудь заметно влияющих на работу гиродатчика, можно забыть. На паркфлаере был с месяц назад проект вибростенда для динамической балансировки ВМГ на датчике ADXL345, но это для Ваших задач оверкилл.
Датчик, по определению, ничем не управляет, он лишь сообщает системе управления о значениях измеряемых им величин, в данном случае - угловых скоростях и проекции вектора ускорения. Управляет, в данном случае, прошивка MultiWii, которая выдаёт команды сервомашинкам, формируя на соответствующих выходах необходимый PWM-сигнал, в котором задаётся положение сервы. С типовым временем цикла мультивия 3-4мс изменения ширины управляющих импульсов происходят весьма быстро. Код MultiWii на самолёте нормальной схемы “интеллектуально” управляет элеронами, рулём высоты, рулём направления и оборотами двигателя, также выдаёт сигнал на закрылки, если такой сигнал передаётся аппаратурой.
Спасибо, разобрался с установкой режимов на тумблеры. Я так понял , horizon рассчитан на удержание самолёта в одном положении, а angle - режим для новичков, ограничивающий отклонение серв, чтобы не угробили самолёт?
И ещё, GYRO_SMOOTHING использовать, только если фильтры не помогут? И фильтр можно одновременно только один активировать? Или можно сразу несколько? И какие лучше?
И ещё, GYRO_SMOOTHING использовать, только если фильтры не помогут? И фильтр можно одновременно только один активировать? Или можно сразу несколько? И какие лучше?
Читайте комментарии в config.h. Если с английским туго, воспользуйтесь сервисами перевода в интернете, числа им несть.
/* MPU6050 Low pass filter setting. … Uncomment only one option! … */
/* GYRO_SMOOTHING. In case you cannot reduce vibrations _and_ _after_ you have tried the low pass filter options, you may try this gyro smoothing via averaging. … */
Начните с того, что все эти опции закомментированы. На земле запустите двигатель с установленным пропеллером на 50-70% оборотов при подключенном GUI, посмотрите, не плывёт ли горизонт, если не плывёт - оставьте как есть, иначе читайте комментарии в конфиге и действуйте сообразно.
Спасибо. Скажите, а gps ведь можно повесить вместе с гироскопом на одну шину i2c? Ведь она поддерживает одновременное подключение большого числа устройств. Но видимо для тех, что на rs232, нужен ещё переходник rs232 to i2c?
Доброго дня, подскажите с реверсами серв в режиме HORIZONT. C пульта у меня отрабатывает как надо, а со стабилизацией ровно наоборот. Через GUI как не пытался так и не понял принципа реверса. Напишите пожалуйста что нужно поменять в коде конкретно для моего случая. У меня крыло, аппа туринга 9х, контроллер multiwii se v2.5 В прошивке раскомментировал следующие строки в config.h:
#define FLYING_WING
#define CRIUS_SE_v2_0
#define GYRO_SMOOTHING {20, 20, 3}
Заранее спасибо.
Спасибо. Скажите, а gps ведь можно повесить вместе с гироскопом на одну шину i2c? Ведь она поддерживает одновременное подключение большого числа устройств. Но видимо для тех, что на rs232, нужен ещё переходник rs232 to i2c?
“Переходник” представляет собой такую же ардуину с прошивкой code.google.com/p/i2c-gps-nav/ , подключенную на I2C, которая, конечно, поддерживает много устройств, более того, поддерживает конфигурации с несколькими мастерами на шине (здесь это не используется). Также есть в продаже готовые платы-“переходники” с минимумом выводов (RS232 для GPS, I2C, земля, питание и два пина для ультразвукового высотомера (логика работы с этим датчиком в мультивие пока толком не реализована)).
C пульта у меня отрабатывает как надо, а со стабилизацией ровно наоборот
В GUI горизонт нормально расположен, не кверху ногами? И зачем Вам реверс как таковой нужен?
Сегодня опробовал стабилизацию в режиме horizon. Кажется работает. Но при втором запуске хвост стал дёргаться влево-вправо. Был слишком сильный ветер, самолёт чуть не переворачивало. Так что, пока о точности стабилизации сказать не могу. Может на неделе будет ветер, но немного послабее, тогда и затестирую более точно
В GUI горизонт нормально расположен, не кверху ногами? И зачем Вам реверс как таковой нужен?
В GUI горизонт расположен нормально, а реверс нужен для того чтобы стабилизация нормально отрабатывала. Сейчас в режиме стабилизации: при опускании правого крыла, поднимается правый элевон и соответственно слева опускается. При опускании носа (пикировании) оба элевона опускаются и наоборот. Насколько я понимаю должно быть наоборот? Двигатель подключен напрямую к приемнику, то есть арм не делаю, это важно? Вообще руководствовался этой статьей: www.*************/blogs/view_entry/8821/
такой способ не помогает? rcopen.com/forum/f90/topic289242/195
такой способ не помогает? rcopen.com/forum/f90/topic289242/195
Уже перепробывал все комбинации, подскажите если у меня с пульта все нормально, а стабилизация отрабатывает наоборот какие квадратики мне нужно нажать? И что значит кнопка Live? При нажатии кнопки export to file содержание файла servos.txt не меняется. Целый день дурюсь, хотел сегодня опробывать, но логически понимаю что это морковка со старта. А еще надо будет GPS подключить, а тут на простейшем споткнулся. Кстати крыло отлично летало без стабилизации, просто хочу прикрутить FPV к нему. P.S.Кстати у меня стоит реверс на элевоны на аппе, я так понимаю это не на что не влияет .
С квадратами я тоже не особо разбирался, как-то методом тыка получилось, а еще проще было в коде маховия поменять реверс-это на крыле все. Только с бикслером не срослось, пришлось ардупилот ставить.
Да вроде люди летают на крыльях на wii. А ардупилот на контроллер multiwii se v2.5 встанет?
Лично я ставил Mahowii на крыло, чтобы был автовозврат. Так как у самого AIOP про se v2.5 подсказать не могу ничего
Поменял на крыле с прошивки стандартной на маховика, реверс серв там реализован, всего то пришлось поставить по минусу перед каждой еденичкой, зато через гуи не меняется тогда, в общем это даже в лучшую сторону. Поставил и настроил gps, не знаю будет ли он работать по назначения или нет, осталось пробовать.
Можешь скинуть ссылочку, попробую.
Ссылку на что? на Mahowii? Если да, то она покупается у самого маховика 😃
rcopen.com/blogs/83206/17033