PitLab FPV System: OSD+Autopilot+Ground station

Ни кто не советует сохранять триммеры в ветер… А узнать ровно ли летит самолёт затрачивая минимум энергии можно только в полёте…
Пытаться понять ровно ли будет лететь самолёт в небе, стоя на земле - глупо… По этому я и написал “Только в полёте!”
И ещё, триммеры для АП Питлаб, это НЕ подстраивание самолёта под ситуацию, это информирование АП о начальном положении плоскостей, при которых самолёт поддерживает ровный полёт…
Кстати, у нормального самолёта ветер не влияет ни на тангаж ни на крен…
“Корова” Скай к таковым не относится… Он изначально ровно летать не может…
это информирование АП о начальном положении плоскостей, при которых самолёт поддерживает ровный полёт…
Вот и я об этом.
Пытаться понять ровно ли будет лететь самолёт в небе, стоя на земле - глупо… По этому я и написал “Только в полёте!”
Правильно, отключив стабилизацию видим поведение, триммируем до близкого к идеальному и после этого сохраняем.
Ты же не пересохраняешь триммеры при каждом запуске!
Продолжаю изучение АП. Самолет оттриммирован, летает замечательно. Сегодня подключил АП к компьютеру и заметил что на канале тангажа съехали конечные точки, я полагаю из за триммирования. В связи с этим вопрос: после триммирования надо снова задавать АП новые конечные точки или нет?
нет, не нужно
Наконец то вернулся с длинной командировки. Не терпится поехать в поле. К моему разочарованию сдохла зарядка… вернее она перезаряжает на напряжение 4.28в.
Заказал питлабовский модуль блютуз, буду смореть что и как шлётся. Нужно для лайв канала в мою прогу…
Сори за офтоп.
Очередная прогулка по окрестностям
Не получается подключить блютус к АП. Модуль настроил, подключил к разъему. В меню выбрал универсальный апи. Программа модуль видит, подключается к нему. При попытке записать путевые точки, говорит что нет подключения к осд. Скорости пробовал разные. Есть какая-то хитрость?
Хитрость одна, использование проги под андроид…
сам не пробовал, тут подсказать ничего не могу…
ты бы хоть пару полётов показал, интересно же 😃
Пока особо похвастаться нечем. Воюю с видео и лрс. Вот есть небольшое видео, составленное из двух полетов. В этом месте какая то аномалия, видео и управление отваливаются метрах на 600. И ап не до конца настроен был, поэтому летал кругами в пределах видимости.
взлет с помощником взлета, весь полет и посадка в стабилизации. Максимальная высота 658м, максимальное удаление около 600 м.
Молодец, похвально…
Я правда хотел телеметрию глянуть, тема то техническая… 😃
К сожалению видео есть только с камеры, на земое не писал. Что касается блютуса - прогу использую под андроид, FPV tracker. Заплатил за три месяца. Законнектить пока не получается (
Не получается подключить блютус к АП. Модуль настроил, подключил к разъему. В меню выбрал универсальный апи. Программа модуль видит, подключается к нему. При попытке записать путевые точки, говорит что нет подключения к осд. Скорости пробовал разные. Есть какая-то хитрость?
я так понимаю, блютуз нужно подключить именно к ОСД, а ты пишешь подключил к АП…
вот это сделал?
To properly configure transmission speed open OSD menu service->UART and set Buddy flight mode and then proper UART speed according to your module setting. Default value for newly purchased Bluetooth module is usually 9600 bps.
опять же я не нашёл никакого упоминания о “универсальный апи” ты где это прочитал?
по видео, на земле обязательно нужно писать, это золотое правило fpv !
Модуль подключил конечно к ОСД. Универсальный api есть в меню осд. Там же где buddy flight. Я думал что buddy flight это для модема. Вернусь из командировки, попробую.
Talon 2020, Pitlab AP - налет 1000 км
Поздравляю с первой тысячей! 😃
Всем привет.
присоединяюсь к сообществу Питлаберов)
недавно купил себе этот АП, без наземки. при помощи инструкций Сергея собрал все это добро в своего потрепанного скайсерфера(x-uav skysurfer x8 , который был вообще моим первым самолетом и на котором я учился летать(повидал он страшные вещи в своей жизни). летал только в режиме стабилизации, без камеры на борту. разок попробовал воткнуть режим auto в надежде вернуться домой, на что самолет ответил стремительным рывком почти вертикально вниз, повезло, что вовремя дернул переключатель обратно в стаб. высота была метров 20-30. понял, что не стоит так эксперементировать, не доведя все настройки до нужного уровня.
скажу сразу, я ПРОЧЕЛ всю ветку) было сложно читать все эти терки и споры) но я прочел) я так же имею pixhawk, правда он у меня на квадрике стоит, там я им очень доволен. ни разу не подводил. но я не являюсь рекордсменом, в дальности и высотах полетов, летаю в основном низко и близко. но мечтаю летать на двух и трехзначные числа в км)
теперь о моей конфигаруции и что я собираю.
скай1600 (брал бушным, состояние нормальное)
turnigy 9xr pro
lrs hawkeye fpv-community.ru/…/314-hawkeye-dtf-uhf-deluxe-pere… извиняюсь если нельзя вставлять ссылки но так вроде понятней. приемник вот такой fpv-community.ru/…/315-hawkeye-dtf-uhf-minirx-prie…
камера, моторы и сервы с регулями я думаю указывать смысла нет, это все понятно.
первый мой затык SBUS. я на скайсервефере использовал pwm, и там был другой модуль с приемником (frsky djt и v8 fr2) там все понятно и все работало. хотя засунуть все эти провода в скайсерфера было не просто). я не настраивал никогда SBUS.
собственно что я делаю: с помощью расширения хром я настраиваю свой вч модуль следующим образом
TX
RX
В FPV_manager переключаю сигнал на SBUS
Подключаю провода 1 разъем на АП (тот который со стороны юсб входа) в 8 порт на приемнике (так как в настройках RX именно на этом порту настроен SBUS)
в соответствии с инструкцией подключаею провод от ESC в АП. больше пока ничего не подключаю.
соединяю комп с АП по юсб и хочу проверить как все работает но ничего не работает. не реагирует на движение стиков.
подскажите что и где еще я забыл или не настроил?
заранее хочу сказать, я начинающий в этой области) если кого-то нервирует разжовывания для чайников не пишите) поберегите себе нервы.
я искал инструкции как это сделать, но нашел только старые переписки Сергея на рсгрупс, там на скриншотах старые версии плат, у меня нету портов таких.
Вовсе не обязательно использовать именно S.bus, Питлаб умеет работать и с CPPM и с обычным PWM со множеством проводов…
Если ты подключил S.bus с выхода приёмника на “первый” штырёк Питлаба, подал питание и на приёмник и на Питлаб, включил передатчик, крутишь стики и в FPV_manager не видишь реакции, это говорит о том, что Питлаб не видит сигнала или его там нет… Формально ещё не было случаев, чтобы Питлаб не видел сигнал… По этому нужно как то убедиться что сигнал уходит с твоего приёмника…
Как настраивать твоего Хавка я не знаю, да и тема тут не про это…
разок попробовал воткнуть режим auto в надежде вернуться домой, на что самолет ответил стремительным рывком почти вертикально вниз, повезло, что вовремя дернул переключатель обратно в стаб. высота была метров 20-30. понял, что не стоит так эксперементировать, не доведя все настройки до нужного уровня.
правильно понял, нельзя этого делать не настроив всё по уму а так же проводить эксперименты на такой высоте - глупо…
возможно у тебя стоит руль высоты в реверсе вот он и “рванул…”
чтобы настроить Пита, нужно читать мой дневник а не ветку…
Pitlab, установка и подготовка к первому полёту. Питлаб
PitLab, режимы, управление меню OSD, Питлаб
PitLab FAQ, Часто задаваемые вопросы, ЧАВО Питлаб (часть 1)
дневники я тоже прочел. по ним и делал настройки.
по pwm с другим приемником все работало, но я не хочу опять эту косичку из проводов. раз умеет и приемник и АП работать с SBUS, то я думаю надо все делать по уму).
я там обновил картинки в прошлом сообщении, вдруг все-таки будет мысль, что я там не так настроил. полезу дальше ковырять уже приемник. раз никаких других хитростей нет у АП с входяим подключением SBUS/ спасибо
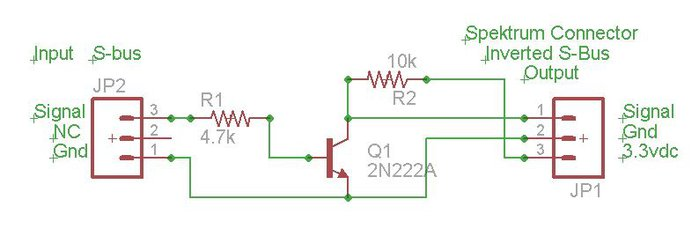
почитал про Хавка, пишут что из него выходит инвертированный S.bus, который может не восприниматься портом UART
нужно городить инвертор… возможно это именно твой случай…
SBUS
On most hardware, this is actually inverted SBUS because a normal UART cannot output real SBUS. If you are using ardupilot and want 16 channels, don’t bother with inverted SBUS and try SUMD instead. But if you need SBUS, see this page to make an inverter: www.rcgroups.com/forums/showthread.php?t=1459431&p… and groups.google.com/forum/#!msg/px4users/gUE6mPISvKA… .
спасибо, буду копать в эту сторону, а пока наверное вернусь к PWM, а то лето кончится)
один транзистор и два резистора, делов на 15 минут…
если количество каналов до 8, сделай СРРМ, это тоже один провод…