PitLab FPV System: OSD+Autopilot+Ground station

Вроде особого криминала нет, горизонт не плывет на ОСД?
Боюсь я после твоего краша в кукурузе с сумасшедшей скоростью повредился датчик…
Что то хлипкие они какие то новые, у меня на старой версии никогда такого не было, хоть и бил по началу крыло об землю знатно…
у этого крашей давно не было, это я на йнаве/матеке впиндюрился) и вообще както странно вел себя этот полет, удивлен что он не возвращался , хотя режим активировал и на осд высвечивался. Если честно про горизонт сказать ничего не могу, вроде проблемне было.
А вообще наверное зря виброплощадку выкинул, крашей не было, но мог жестко посадить
По вибро - Питлаб на экране отображает повышенные вибрации, знак 2G например и т.д. так что это вряд-ли причина.
Видео невозврата покажи. Лог с наземки есть?
хотел на 2 х моторнике испытать винты 3 лопасные и сначала поставил носом на весы , проверил тягу с теми что летал и удивился на 100% газа вибрация была приличная, затем поставил трех лопастные и работали очень мягко
может сошла с ума гира/аксель, а вообще нужно вывести значек G сейчас . Пропы балансирую .
поглядел Мах крен 18 может немного маловато но я с этой настройкой отлетал почти 2 года и все было ОК www.dropbox.com/s/redeahfxn8qk0bn/LOG078.GSL?dl=0
Пока у меня один вопрос, что происходит с расстоянием до базы на 17 секунде, на 51 секунде? Почему такой резкий скачек?
Может я неудачно отрезал лишнее , вот полная версия , хотя нет , мне вчера тоже показалось что както подзависло
Пока с телефона смотреть сложно, но минута ноль пять, прыжок с 200 на 400 или я ошибаюсь?
да верное ,есть прыжок. там много таких моментов 2,14 мин
Вот вопрос, откуда? Посмотри внимательно координаты, прыгают в этот момент?
на мой взгляд координаты не прыгают, вот немного замедлил
вчера, посмотрев твоё видео, у меня создалось впечатление банального срыва в штопор, такое же мнение имеет и разраб:
На первом видео с штопором в режиме STAB вы можете увидеть сначала поворот влево против ветра, а скорость GPS падает до 50 км / ч,
Затем резко поверните направо, с ветром и модель разгоняется до 80 км / ч. Из этого следует, что дул довольно сильный ветер.
Возможно, после резкого поворота вправо с ветром (когда ветер дул сзади модели) скорость модели относительно ветра упала ниже скорости перетаскивания и отсюда штопор?
На втором видео самолёт не может нормально повернуть, хорошо бы проверить настройки угла крена, стабилизации крена. разраб пишет о том же
На втором видео полета авто видно, что модель имеет очень небольшой наклон и из-за этого очень плохо поворачивается. Вам нужно увеличить предел наклона и, возможно, силу стабилизации наклона.
на счёт координат я попробую дома посмотреть, но расстояние до дома скачет, надо понять причину
Насчет штопора спорить не буду, летал визуально, было далековато , да и ветер был. По поводу крена, такая мысль тоже была, крен был 40 угол 18 но я же летал давно с этим углом , да и крен зажимал еще сильнее.
И по первому пункту и по второму сам думал, но хочется понять в чем дело, за почти 2 года такого не было
про расстояние до базы всё понятно, ты дёргаешь стик газа, и режим сменяется от полёта домой до полёта вокруг точки.
пробуй дать больше крена
уже дал, завтра если погода позволи полетаю. Сергей а как отключить"режим сменяется от полёта домой до полёта вокруг точки." что бы было как обычно, а то сбивает с толку? спасибо
Я думаю что возможно я экспириметировал с центровкой, вот и свалил его
При включении режима авто поведение самолёта зависит от положения стика газа
- Стик в нижнем положении - возврат домой
- Стик в середине - удержание курса и высоты
- Стик вверху - кружение вокруг текущей точки
Ты в режиме авто елозил газом туда сюда вот режимы и менялись, обрати внимание на надпись под АВТО, то base то (*)
если хочешь возврат, включил АВТО и опустил стик газа в ноль.
При включении режима авто поведение самолёта зависит от положения стика газа
- Стик в нижнем положении - возврат домой
- Стик в середине - удержание курса и высоты
- Стик вверху - кружение вокруг текущей точки
Ты в режиме авто елозил газом туда сюда вот режимы и менялись, обрати внимание на надпись под АВТО, то base то (*)
если хочешь возврат, включил АВТО и опустил стик газа в ноль.
У ж за 2 года 1500км это я выучил) кружение я включил умышленно, затем возврат. Не елозил а переключал ражимы осознано😁
речь о другом почему он сбрасывал дистанцию 170м затем 0 или 200 м затем 400 вот это я не понял.
Я так полагаю что улетев на большую дистанцию он мне пару раз скинет и хрен поймеш где ты есть . Как так может быть
Летим в АВТО, расстояние до базы 450 метров, двигаем стик вверх, включается режим кружения над текущей точкой, естественно цифра 450 сбрасывается и отсчёт начинается от текущей точки… самолёт идёт по кругу, 50-100 метров до “виртуальной базы - точки”, снова двигаем стик вниз, включается режим полёта домой, на реальную базу, до неё всё те же 450 с учётом того, что ты уже немного отлетел в ту или иную сторону…
Олег сделал ещё один тест со второй версией прошивки:
_Тест 2 с небольшим изменением работы руля высоты в новой прошивке бета-версии. Так как в режиме динамического газа была возможность микса газ-руль высоты из за специфики режима для набора, то тут при активации KeepAirspeed данный микс отключается. Система сама теперь без микса с любой тягой управляет рулем высоты.
Что важно , это ограничение лимита газа. У фишки 41 так же этот параметр есть но увы как у многих автопилотах доступен только через компьютер. На питлабе другой алгоритм восприятия к полетам, тут просто -многофункциональный самолет.
Для чего ограничиваем газ? Допустим ставим 90 км в час удержание скорости. Надо понимать что установлена программно дельта с порогом до —8 км в час. Самолет летит на автопилоте, держит 82—85—90 км в час, задатчиком высоты задаем набор высоты еще метров на 200—400 . Самолет прибавляет тягу и в набор идет и скорость может быть чуть меньше установленной . Но мы понимаем что при такой тяге это нормально. Зачем увеличивать лимит и лупить вместо 24 ампер , 50 ампер что бы выдержать скорость. В горизонте ситуация меняется.
У нас есть три параметра.
- ограничитель лимита газа
- удержание высоты
- установка воздушной скорости
Зачем «удержание высоты» Этот параметр зависит от вашей модели, на скоростной параметр уменьшаем, мне на бинаре при 30% летит хорошо и плавно отработка руля высоты идет.
Все настройки в авто полете у питлаба реализованы в % от 10—100.
В этом то и кайф, мы возврат на курс, плавность отработки, компенсацию ветра выставляем в полете крутя ручку с % и пид контроллер меняет параметры.
Так же я проверил все режимы в полете, это полеты по любому записанному в память маршруту, авто снижение , авто посадка по Ils и тп.
В целом я доволен, летит и держит самолет довольно хорошо. Напомню, тут 156 грамм на дм2 нагрузка на крыло. Я на руках с малой тягой 14—17 ампер держу и то самолет проваливается и приходятся всегда играть рулем высоты или лупить 24 ампера. Но автопилот прекрасно держит работая плавно рулем. Этом параметр я тестирую для выхода новой прошивки. Сейчас производитель на основании сегодняшнего полета еще проводит доработку по работе руля высоты и в работе дельты для погрешности скорости. Работа кипит. Спасибо Збигу._
Поясните , я в мавлинках не очень. На групсах в теме появилась картинка, человек поясняет что на посленейпрошивке можно снятьмавлинк (наверняка читали это сообщение) так вот на картинке написано Мавлинк IN что мне дает для использования поворотки АТТ , вроде нужен OUT 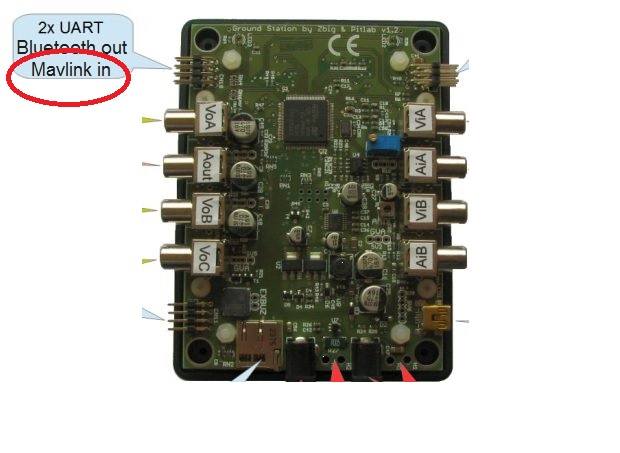
это вход Мавлинк, поворотка Питлаб может принимать Мавлинк от любой другой системы и писать логи, отображать информацию, управлять антенной…
твоя поворотка ATT не умеет принимать Мавлинк на сколько я знаю, так что даже если бы был выход, он бесполезен…
в принципе есть такой вариант, насколько я знаю, наземка Питлаб может отдавать Мавлинк, если этим Мавлинком можно управлять какой то крутящей железкой, то всё складывается…
Мавлинк от Питлаба <> переключатель <> Мавлинк от МФД
это моё сообщение в корне неправильное, я ошибся… не отдаёт а умеет принимать…