PitLab FPV System: OSD+Autopilot+Ground station

При включении режима авто поведение самолёта зависит от положения стика газа
- Стик в нижнем положении - возврат домой
- Стик в середине - удержание курса и высоты
- Стик вверху - кружение вокруг текущей точки
Ты в режиме авто елозил газом туда сюда вот режимы и менялись, обрати внимание на надпись под АВТО, то base то (*)
если хочешь возврат, включил АВТО и опустил стик газа в ноль.
При включении режима авто поведение самолёта зависит от положения стика газа
- Стик в нижнем положении - возврат домой
- Стик в середине - удержание курса и высоты
- Стик вверху - кружение вокруг текущей точки
Ты в режиме авто елозил газом туда сюда вот режимы и менялись, обрати внимание на надпись под АВТО, то base то (*)
если хочешь возврат, включил АВТО и опустил стик газа в ноль.
У ж за 2 года 1500км это я выучил) кружение я включил умышленно, затем возврат. Не елозил а переключал ражимы осознано😁
речь о другом почему он сбрасывал дистанцию 170м затем 0 или 200 м затем 400 вот это я не понял.
Я так полагаю что улетев на большую дистанцию он мне пару раз скинет и хрен поймеш где ты есть . Как так может быть
Летим в АВТО, расстояние до базы 450 метров, двигаем стик вверх, включается режим кружения над текущей точкой, естественно цифра 450 сбрасывается и отсчёт начинается от текущей точки… самолёт идёт по кругу, 50-100 метров до “виртуальной базы - точки”, снова двигаем стик вниз, включается режим полёта домой, на реальную базу, до неё всё те же 450 с учётом того, что ты уже немного отлетел в ту или иную сторону…
Олег сделал ещё один тест со второй версией прошивки:
_Тест 2 с небольшим изменением работы руля высоты в новой прошивке бета-версии. Так как в режиме динамического газа была возможность микса газ-руль высоты из за специфики режима для набора, то тут при активации KeepAirspeed данный микс отключается. Система сама теперь без микса с любой тягой управляет рулем высоты.
Что важно , это ограничение лимита газа. У фишки 41 так же этот параметр есть но увы как у многих автопилотах доступен только через компьютер. На питлабе другой алгоритм восприятия к полетам, тут просто -многофункциональный самолет.
Для чего ограничиваем газ? Допустим ставим 90 км в час удержание скорости. Надо понимать что установлена программно дельта с порогом до —8 км в час. Самолет летит на автопилоте, держит 82—85—90 км в час, задатчиком высоты задаем набор высоты еще метров на 200—400 . Самолет прибавляет тягу и в набор идет и скорость может быть чуть меньше установленной . Но мы понимаем что при такой тяге это нормально. Зачем увеличивать лимит и лупить вместо 24 ампер , 50 ампер что бы выдержать скорость. В горизонте ситуация меняется.
У нас есть три параметра.
- ограничитель лимита газа
- удержание высоты
- установка воздушной скорости
Зачем «удержание высоты» Этот параметр зависит от вашей модели, на скоростной параметр уменьшаем, мне на бинаре при 30% летит хорошо и плавно отработка руля высоты идет.
Все настройки в авто полете у питлаба реализованы в % от 10—100.
В этом то и кайф, мы возврат на курс, плавность отработки, компенсацию ветра выставляем в полете крутя ручку с % и пид контроллер меняет параметры.
Так же я проверил все режимы в полете, это полеты по любому записанному в память маршруту, авто снижение , авто посадка по Ils и тп.
В целом я доволен, летит и держит самолет довольно хорошо. Напомню, тут 156 грамм на дм2 нагрузка на крыло. Я на руках с малой тягой 14—17 ампер держу и то самолет проваливается и приходятся всегда играть рулем высоты или лупить 24 ампера. Но автопилот прекрасно держит работая плавно рулем. Этом параметр я тестирую для выхода новой прошивки. Сейчас производитель на основании сегодняшнего полета еще проводит доработку по работе руля высоты и в работе дельты для погрешности скорости. Работа кипит. Спасибо Збигу._
Поясните , я в мавлинках не очень. На групсах в теме появилась картинка, человек поясняет что на посленейпрошивке можно снятьмавлинк (наверняка читали это сообщение) так вот на картинке написано Мавлинк IN что мне дает для использования поворотки АТТ , вроде нужен OUT 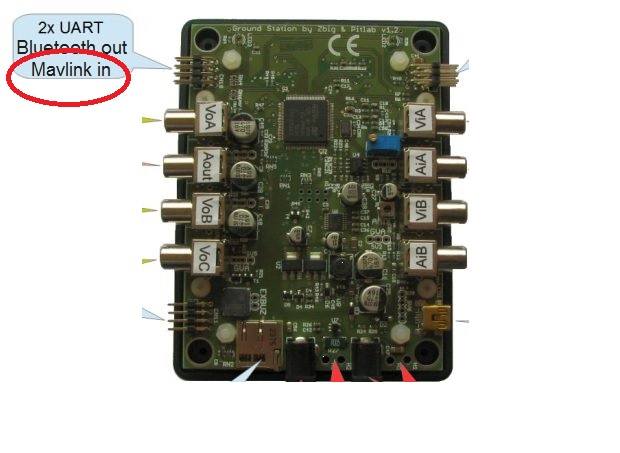
это вход Мавлинк, поворотка Питлаб может принимать Мавлинк от любой другой системы и писать логи, отображать информацию, управлять антенной…
твоя поворотка ATT не умеет принимать Мавлинк на сколько я знаю, так что даже если бы был выход, он бесполезен…
в принципе есть такой вариант, насколько я знаю, наземка Питлаб может отдавать Мавлинк, если этим Мавлинком можно управлять какой то крутящей железкой, то всё складывается…
Мавлинк от Питлаба <> переключатель <> Мавлинк от МФД
это моё сообщение в корне неправильное, я ошибся… не отдаёт а умеет принимать…
если один питлаб и 3 матека, система питлаба не будет следить за самолетом под Айнав.
берёшь со своего Матека телеметрию в виде Мавлинк, пускаешь её обратным каналом на землю, там направляешь этот поток в наземку Питлаба и она теоретически должна управлять антенной!
делов то, там же у Матека всё просто 😃
Это если речь о поворотке от Питлаба у меня трекер большой МФД и его нет смысла менять. У меня нет проблем с телеметрией и повороткой в связке с Матек,проблема заставить поворотку работать от ПК/ОСД питлаба, без потери родной телеметрии. На групсах писали что нужно перекодировать телеметрию через блютуз , но это не мой конек
мне казалось задача - облегчить себе жизнь и не возить на полёты две поворотки, она по сути решаема… а тут упёртая позиция привязать стороннюю поворотку к Питлабу…
непонятно зачем, но каждый волен хотеть то, что он хочет…
если вопрос принципиальный по механизму МФД, что мешает его разобрать и запитать сами сервы от Питлаба?
Сергей, у нас у каждого в этом деле своя позиция, но на данный момент я значительно чаще использую крылья с матек чем с питлаб) это конечно страшный грех) но я не являюсь фанатом одной системы, какой смысл ставить питлаб на самолеты которые расчитаны на убой и расчитаны для тренеровок или полетов больше 200 км.
На самолете на Питлабе летаю реже и получаю истиное удовольствие, правда когда он работает нормально) к НГ куплю хороший планер тут Питлабу будет самое место с его возможностью отслеживать термики.
Вот по этому хочется чтобы МФД работала с этими системами
Вот по этому хочется чтобы МФД работала с этими системами
так ещё раз, что мешает то???!!!
тащишь Мавлинк с матека на поворотку Питлаб, с неё паяешь провода к сервам МФД и всё работает от матека и от Питлаба!!!
Вполне возможно как вариант . Конечно это компромисный вариант, теряется главный плюс, включил и лети, не нужно что то тыкать дополнительно.
Осталось выяснить нужен ли наземке Питлаб мавлик от матека)
Добрый день, подскажите, пожалуйста, где можно найти плату поворотки питлаб. На самом сайте питлаб не смог найти. Буду признателен за рабочую ссылку.
Плату купить? Ищите “наземная станция”
Осталось выяснить нужен ли наземке Питлаб мавлик от матека)
Мне прямо тоже интересно стало 😃
Прошивка новая после доработки, изумительно самолет который при ослаблении тяги проваливается, то теперь Автопилот шикарно держит. Руль высоты в данном режиме работает совершенно по новому не привязываясь к настройке динамического газа, хотя кому он нравится (для легких самолетов экономичный режим) он остался. Нагрузка 166 дм2 на крыло.
Трек приложил что бы посмотреть ровность .
Удержание курса и высоты. Задатчиком высоты и курса я установил ему и он так и держал весь полет.
с буржуйского форума:
Потрясающая наземная станция pitlab получает данные из inav mavlink cloud.tapatalk.com/s/5fc6b484...130-WA0064.mp4
осталось понять как
осталось понять как
не совсем понимаю в чём сложность? ты же как то получаешь Мавлинк с инава на землю… я тебе уже не раз писал, заведи его в наземку! наземка имеет вход!
но у тебя
упёртая позиция привязать стороннюю поворотку к Питлабу…
так ещё раз, что мешает то???!!!
тащишь Мавлинк с матека на поворотку Питлаб, с неё паяешь провода к сервам МФД и всё работает от матека и от Питлаба!!!
Ну теперь то всё понятно. А мы то думали…
Позиция сделать железо совместимым-прекрасна. Так делает весь мир и этого не нужно бояться. Я хочу иметь возможность зарядить аймаксом батарейки onbo,
Крутить китайскую гайку на 32 русским ключом на 32 и т.д. Конструкция поворотки питлабовцев…ну как бы так сказать чтобы не обидеть… в общем, она не идеальна из-за своей простоты. У mfd прекрасная конструкция и работает она замечательно. Я бы с удовольствием воткнул наземку питлаба в поворотку mfd и получил наилучшее из возможных сочетание на рынке.
упёртая позиция привязать стороннюю поворотку к Питлабу…
Сергей, ну ты же сам смутно представляешь будет это работать или нет, например не каждая серва подходит к этой поворотке, а будет ли они работать от питлаба ХЗ. Взять поворотку за 30 тыс раскурочить и оставить 2 сервы и и слипринг. предложение так себе) вот кто упертый так это ты)😁
Олег до недавнего времени летал получая телеметрию мавлинк через БТ может конечно что изменилось и есть другое решение , но он молчит😒