PitLab FPV System: OSD+Autopilot+Ground station

Да, специально для этого производитель и написал жирным шрифтом в инструкции, что ваш самолёт с увеличением газа должен увеличивать вертикальную скорость. И это достигается регулировкой вакоса и ЦТ.
Что то Я не понял, автопилот не рулит рулем высоты чтоб лететь в заданном коридоре высоты?
Что то Я не понял, автопилот не рулит рулем высоты чтоб лететь в заданном коридоре высоты?
одно и то же уже вторую страницу…
для снижения использует, для подъёма только частично, через микс газ-руль высоты
Пол дня ищу где пункт калибровки RSSI ? В меню, вчера был !!
Пол дня ищу где пункт калибровки RSSI ? В меню, вчера был !!
а сегодня что ли нет? 😃
В меню “сервис”, самолёт лучше отнести от передатчика метров на 50
ОСД при входе с пульта и при входе с джойстика разные!!! При входе с джойстика больше пунктов.
Помогите, пожалуйста с RTH - понять не могу. Тумблер в авто, режим отображается “авто”. Газ в 0. Надпись RTH не появляется и никакого возврата не происходит. Дает полный газ и встает в круг. При этом GPS/компас точно есть, правильно показывает и направление на базу и курс и дистанцию.
Единственно на что грешу - что перемаплены каналы газа и руля направления (3 и 4 местами поменяны в настройках автопилота, управление через S.BUS), конфигурация одинакова на 2х самолетах с питлабом и у обоих одинаковое поведение.
индикация “авто” а второй значок что показывает? “base”, “hold”, “*” ?
звездочка
Провода на “газ” подключены именно в 4 канал в соответствии с инструкцией?
У вас включается режим кружения над точкой вместо возврата…
S-BUS, провод всего один. Видать и правда баг - не учитывается ремаппинг S-BUS каналов. Надо написать бы Питеру.
Какой нафиг баг? Нефиг менять каналы на своё усмотрение! Ещё раз спрашиваю ВЫХОДНЫЕ провода как подключены?
Выходные подключены правильно, согласно маппингу - как-то же летаю, газ с руддером не перепутаны. А баг есть: маппинг позволен (что значит нефиг менять? есть возможность, значит можно менять), но не учитывается, видать хардкодно прошит номер канала.
Выходные подключены правильно, согласно маппингу
провода нужно подключать согласно ИНСТРУКЦИИ а не маппингу!
Я точно так же как и огромное количество пользователей летаю по Sbus но у меня багов нет! Вы в состоянии ответить на простой вопрос, в какой именнно канал вторнут проводок от регуля и как у вас там всё перемаплено?
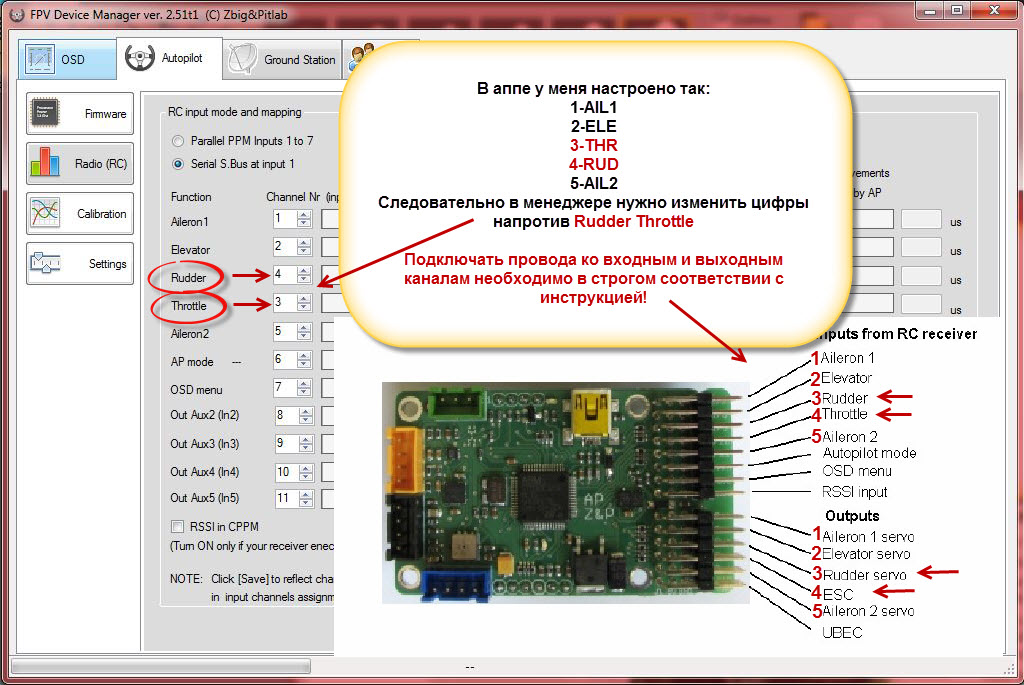
У меня в аппе:
1-AIL1
2-ELE
3-THR
4-RUD
5-AIL2
Не смотря на это провода нужно подключать строго по ИНСТРУКЦИИ:
1-AIL1
2-ELE
3-RUD
4-THR
5-AIL2
а в менеджере просто поменять две цифры на 3 и 4 канале…
Провод на регулятор подключен 4й разъем.
На серву руддера в 3й.
S.Bus промаплен в менеджере:
1 - элерон, 2 - элеватор, 3 - газ, 4 - руддер, 5 - элерон
Не работает.
покажите пожалуйста скрин настройки каналов в менеджере и списком как настроено в аппе…
может мы не понимаем друг друга
Вечером выложу
Кликабельно
Именно так и сделано.
В менеджере проставлены правильные каналы,
выходы 3 - руддер, 4 - двигатель
вход подключен ТОЛЬКО 1 - на 1й пин заведен SBus с приемника.
В аппе:
1й элерон,
2й элеватор
3й тяга
4й руддер
5й элерон
6й режим
7й OSD
(если что - 8й поворот камеры)
давай так, подключаешь АП к компу через USB, подключаешь батарею питания АП
включаешь режим “авто” и двигаешь стиком газа, на экране видишь в каком канале бегает зелёная полоска…
только что проверил у себя
Все верно двигается - канал с надписью Throttle. Я еже как-то летаю в стабе и без АП, при неправильном коннекте оно бы в стабе не летело.
Такое ощущение, что я чего-то недопонимаю в самой логике включения возврата, может там лимиты какие по дальности, высоте еще чего?
Я больше чем уверен, что беда в не установленных энд поинтах каналов в менеджере. Если бы канал был перепутан, он бы не взлетел. Мало того, так рег не видя ноль, незаармил бы вообще.
Подключите всё и пройдите настройку нажав на кнопку “EPA/ servo travel”, при этом не забудьте все каналы на аппаратуре включить на полные расходы.