Activity
Бальзовый самолет снят. Забирать в г. Королев. Очень желательно предварительно описать комплектацию: мотор и акум, которые там стоят. Идеально - аппаратуру на которую он откликается. Пишите в личку.
Кто-нибудь находил прошивку? 2.4, чуствую, ждать будем еще долго. Мой пришел с Factory(84c86f71) от 14.01.2021. Хотелось бы обновить, т.к. бывают глюки с протоколом crsf (после потери сигнала от приемника, модуль перестает узнавать пульт; иногда при включении модуль не узнает сигнал, который идет от пульта, помогает изменение протокола в модели на любой и возврат crsf).
Помогите мне пожалуйста, замерьте номиналы резисторов 1 и 2
Замеры прямо на плате:
R1 - 30k
R2 - 10k
Скорее всего это делитель для повышайки, т.е. можно брать ± километр 😃
Поднять средний ПИН микросхемы
Исправить сообщение не могу, но этот метод не работает. Микруха упрощена до предела и внутреннего механизма включения/отключения не имеет. Средняя нога никуда не подключена и ничем не занимается. Так что реализую первый вариант.
По поводу модов питания. На данный момент уже есть как минимум 3 нормальных решения, которые тянут 1 ватт (и где модуль обесточивается программно). 2 проверены реально, одно - нет. Все позволяют высосать батарейку до 3.5, как и хотели разработчики джампера, но не смогли 😃
-
Вариант от Сергея. Перерезать плюс под светодиодом и запитать транзистор нормальным проводом с другой стороны платы. Проверен, работает.
-
Припаять еще один транзистор, который будет управлять плюсом в разрыв синего/сиреневого/цвета-испуганой-нимфы провода. Мне не нравится количеством возни. Но также проверен.
-
Мой вариант. Поднять средний ПИН микросхемы повышайки внешнего модуля и подать туда плюс от аккумулятора. Повышайка будет включаться транзистором на материнке, а ток пойдет уже по проводу от аккумулятора без падений. Вариант не проверен, продолжаю ждать модуль кроса, который заказ одновременно с аппаратурой…
Кто-нибудь находил даташит на повышайку для внешнего модуля? Вроде как на ней написано “85280v”.
Насколько я понимаю, там внутри стоит повышайка для внешнего модуля, которая может выдать до 400 мА и 7 В при входе выше 3.4. Этого должно быть достаточно для 500 мВт кроса. Может и для 1 Вт, но это надо тестировать, а мой нано-модуль еще в пути, не думаю что раньше 2-х недель доберется.
PS: контакты в кроватке для аккумулятора практически не упругие: как их не подгибай, аккумулятор их обратно разгибает и норовит потерять контакт. Полагаю еще и в этом причина нестабильной работы на большой мощности. Буду припаивать пужины.
На али, типа у официального магазина - JumperTechnology Store. Заказал 15.01, привезли 03.02.
На мой взгляд - не хватит места, ну меня версия с мультипротоколом 4 в 1, может с одним чипом выполнено иначе, без надстройки (хотя вряд ли, на основной плате нет ВЧ части). Я хотел было подцепить 1s lipo на 1500 mAh, но не войдет. В лучшем случае 450 можно разместить, а в ней уже не очень много смысла. От задней стенки до модуля 12 мм, 10 - если учитывать шайбы для крепления внешнего модуля.
Забрал сегодня с почты аппаратуру. Ощущения приятные. Софт-тач пластик, приятные стики. Тумблеры - обычные для джамперов и радиомастеров. Модели хранятся в памти процессора, но скрипты - на карте. Щипковым хватом вроде бы нормально, но летал только в симуляторе.
Главный минус на данный момент - плохие контакты в месте для батарейки. Подогнул их, 18650 вроде держится, но доверия контактам нет. 21700 не влезет по диаметру: там от силы 19 в самом узком месте. Светодиод светит хоть и в основном зеленым (он многоцветный если что), но пытается выжечь глаз.
Модуль Crossfire Nano TX еще не пришел, поэтому с тестами мощности придется повременить.
Вообще собираюсь сделать такие доработки:
- Вырвать светодиод и вместо него сделать вешалку для ремешка. Места там мало: в основном мешает рамка кнопок.
- Поменять провода от батарейного отсека до платы, они так же отвратительны, как и сами контакты. Очень надеюсь что это решит проблему с нехваткой токоотдачи (еще бы, с такими контактами) на полной мощности кроса.
Как раз Дарту-то новый нос на пену и приклеил. Там труха была. Выбрал свою любимую, называется - какая-то начатая. ТДа, было расширение, но сойдет.
… модуль r9m (красный 2019), который покупался в ките с r9m приемышем.
Сразу заработало даже не с задержками, а с передачей состояния пульта раз в 1.5 секунды. Крути-верти что хочешь, раз в 1.5 секунды показания придут.
Сигнализация приемыша в норме, файл-сейф отрабатывает.Прошивки на новые версии всего (хоруса, приемыша, передатчика) - не помогли.
Куда еще смотреть?
У меня такое поведение все же было при несовпадении версий прошивок.
На F1 после 3.2 не было релизов. Я тут хотел старый F1 использовать как джойстик, чтобы аппу не подключать к компу проводом. А такая функция только в F4 есть 😦
Александр разве на 2.4? Я собственно его прошивки для приемников 433 и использую.
В ближайшем Подмосковье, например, с фриской L9R (2.4) не смог улететь больше чем на 2 км. Дальше - непредсказуемые потери связи. Видимо - в зависимости от наличия хороших точек доступа WiFi там, где пролетает борт.
чет не похоже на моторы, может камера болтается?
Большое спасибо, диагностика была верна. Внутри камеры плата с сенсором болталась относительно линзы. Прижал ее мусором, больше не укачивает в полете 😁
Звука возбуждения нет, который бывает, когда моск начинает дурить от вибрации.
Насчет камеры - спасибо, попробую повертеть: она стоит жестко, но она уже падала (и не раз), возможно что-то болтается в ней самой.
Простите, что я такая молодая к вам обращаюсь 😃 На “новом” коптере наблюдается вибрация, зависящая от оборотов. На моторах из коробки был люфт. Попытался вылечить заменой подшипников, но при разборе выяснил, что гуляет толщина вала (3.0 - 2.8 на разных моторах) 😃 В итоге в корпусе подшипники стоят крепко, но на валу, похоже, болтаются (я их поменял конечно, но ничего не изменилось). Смущают сообщения в интернетах о том, что люди гоняют на убитых рейсерстарах и не имеют проблем с вибрацией. Начитавшись их, я даже перекинул всю комплектуху на другую раму, думал - резонанс какой. Но результат - тот же. Валы моторов вроде ровные, при работе без пропов не бьют.
Собственно вопрос: колбасня на видео от люфтов на моторах? Ниже видео с черного ящика, прошу не судить качество.
PS: чудо-моторы - самгуки 2306 на 2500.
стоит чуть дать ролл или питч начинает крутить в истерике
У меня такое было в итоге из-за межвиткового в моторе. Т.е. на малом газу все нормально, а при высоком токе один мотор не успевает за остальными. Хотя грешил еще и на регуль: может где-то пайка плохая. Визуально определил на какой луч заваливается при подгазовках и поменял мотор.
Подскажите, кто какой добился дальности с приемником L9r и прошивкой модуля NonEU? У меня в ближайшем Подмосковье результаты крайне печальные: 2,5 км. При этом, совершенно непредсказуемо, RSSI может упасть до 0 и уже на 800 метрах. Может есть какая-то проверенная дальнобойная версия прошивки внутреннего модуля (XJT)?
Согласен на счет кабеля. У меня за год с небольшим раздраконился разъем micro-USB боковой на пульте, теперь даже новый кабель не помогает, перешел на нижний разъем. А поведение было похожее - как при отключении коптера, пульта он при этом слушается.
Первый придется вскрывать и распружинивать стик газа. Но любопытно: я прошлом году брал оранжевую потому что она была дешевле белой и черной. А тут - наоборот стало.
Т.е. взлетаю, даю газа 40% - вибрирует.
У меня такая шляпа из-за люфта в подшипниках, предположительно: моторы слегка бьют вправо-влево. Т.к. развивалось постепенно, по мере износа. Собственно - жду новые подшипники, пока летаю на другом.
Как самгуки: не люфтят? У меня из 4-х штук Shu (2306) из коробки били 3 штуки, последний начал стучать после нескольких полетов.
Так этож самому. А с моделью - принтер напечатает 😃 Если до выходных не найду, конечно придется грызть пену.
Оживлю некрофильский междусобойчик 😃
Ни у кого нет 3d модели канопы? Моя улетела в неизвестные дали вместе со вчерашним ветром, хочу распечатать нижнюю часть, ту которая сложной формы…
Судя по даташиту (www.sparkfun.com/datasheets/Wireless/…/RFM22.PDF), все же надо понижать уровни, там заявлено максимум VDD+0.3 вольта. Причем достаточно делителя напряжения в сторону RFM-ки. Атмега уверенно увидит единицу от RFM (там будет не меньше 2.7 вольт).
Летаю на force_fcc_and_boost. Лето жарой не баловало конечно, но перегревов не было ни разу. Сейчас, при полетах из дома также все нормально.
версии 23 и 25 не использую, т.к. часто летаем парой дронов и жесткая привязка частоты создает больше сложностей, чем приносит пользы.
С учетом повышения пределов полетов кто-нить пробовал отключать движки сверху и включать ближе к земле? Где-то видел обсуждение этого вопроса, но найти не могу.
Я пробовал, когда он мне включил принудительный лендинг без возможности отказаться 😃 С 1700 он бы на 3-х м/с не спустился. Еще была хохма - при включенном автолендинге уперся в облако с воплем - не подходящая поверхность.
В общем - выполнил дизарм, аппарат пошел вниз блинчиком, с не очень быстрым вращением по яву. Больше 16 м/с в свободном падении скорость не росла. Метрах на 600 заармил его, никаких проблем не было, Мавик повис. Хотя из автолендинга он так и не вышел, пришлось-таки сажать.
Лучше с еще одним вертолетом поискать. Киньте клич в теме поиска, может найдется кто-то недалеко, кто может посмотреть район сверху.
У нас с NinjaFox сходные результаты совместных полетов. На конфиге с 23, если оба улетели, надо разойтись метров на 10, чтобы нормально ловило. Если на одном из них поставить 23, а на втором - обычный, то можно не расходится. Но при лбом раскладе, если включен boost и один мавик летает в далях, а второй прилетел рядом - дисконнект у дальнего. В общем boost - хороший режим, реально качает эфир 😃
В теме по прошивке Байчи проскакивала информация о том, что приемники приходят с некорректными фьюзами меги. И очень рекомендовали прошивать ардуиновский загрузчик через isp и через саму среду ардуино (это самый простой путь получить значения, не вдаваясь в подробности). Только загрузчик должен быть optiboot, с вочдогом.
Короче, проверьтье фьюзы, если слетает ФС, может в них дело. Вотъ
Хотя в этой ветке, напротив ругают ардуино 😦 Ругают
Получил с гиарбест 23-ю аппаратную ревизию. Прошивка обновилась до 1.2.6 через телефон. Вопрос в том, что скрипт из корня не всегда срабатывает. Закономерности не выявил: иногда снимает в соответствии со скриптом, иногда, как указано в настройках с телефона. Скрипт ниже (1920x1080 60fps 30Mbps, шумодав на 2048). Была такая шляпа у кого-то?
writew 0xC05C1036 0x41F0
t ia2 -adj tidx -l 2048 -l
Есть 3 билета на Макс на 30-е число. Резко изменилась семейная ситуация и пойти не смогу. С удовольствием уступлю по очень вкусной цене. Пишите СМС на +7-929-61О-8З-46 - встретимся утром на Казанском вокзале.
Есть 3 билета на Макс на 30-е число. Резко изменилась семейная ситуация и пойти не смогу. С удовольствием уступлю по очень вкусной цене. Пишите СМС на +7-929-61О-8З-46 - встретимся утром на Казанском вокзале.
Сломал все копья, все извилины заплел. Получил плату CRIUS AIOP v2. Прошил в нее MPNG 2.8R3. Оно не полетело, но пока речь не об этом. Затем попробовал 2.9R300 (бету). На первый взгляд проблем не было - плата шилась, MP подключался, аксели калибровались, компас показывал север. Но коптер все равно не выравнивался. Но опять же, это все завязка.
В один момент плата перестала загружаться. При внешнем питании - только синий диод горит. При питании по USB - вымаргивает следующую комбинацию.
www.youtube.com/watch?v=DhCLGESZGqQ
Повторю - с питанием платы все в порядке совершенно точно, после диода она получает 5.01 вольта (питается от отдельного источника на 5.6 в), перемычка снята, с регулей приходят только сигнальные провода. Если питать от одного из регуляторов поведение то же.
Такое поведение на прошивках MPNG 2.8 и 2.9. При этом, на ArducopterNG 2.7 плата после вымаргивания комбинации, плата стартует, соединяется с MP и вообще ведет себя обычным образом. Правда все равно при взлете не выравнивается, не смотря на то, что аксели отрабатывают наклоны нормально.
Очищать eeprom пробовал и из MP и отдельным скетчем. Плата шьется нормально. У меня ощущение, что плата с рождения не здорова. Собственно - в какую сторону копать? И есть ли смысл?
Позвонили по объявлению о пропавшем Бикслере - самолет нашелся. Неделю провисел на дереве, на этой неделе упал вниз и был найден. Хвост остался на сосне 😃 Висел-лежал самолет очень удчано - перевернутым. Дожди не повредили ничего кроме машинок. По крайней мере визуально и на близком расстоянии оборудование работает. Спасибо всем, кто помогал с поисками и прослушиванием эфира.

Не было. Это был второй тестовый полет. Объявления в окресностях сегдня будут развешены. Но и от помощи “6 рукопожатий” отказываться не хочется.
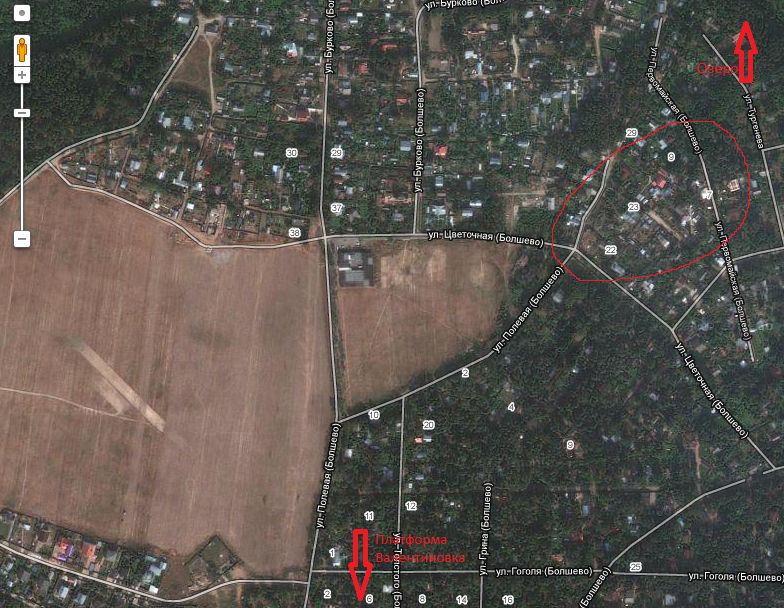
Вчера потерял свой долгострой - Бикслер. Московская область, не далеко от Бурковского поля, платформа Валентиновка Ярославского направления. Вдруг кто от туда, или имеет там знакомых - прошу о помощи. Самолет упал в дачи. Парашутировал с высоты деревьев, либо о них зацепился, легкий, поэтому причинить вред никому не мог. Самолет оборудован радиомаяком на 1 канале LPD (433.075), но через 2 часа после падения, когда удалось найти рацию, там уже было тихо. Или за железным забором, или уже выключен.
Причина падения - отсутствие опыта. Не учел ветер и покрутиться над полосой не вышло, унесло, на обратный путь электричества не хватило. С удаления 1900 и высоты 600, против ветра без двигателя удалось дотянуть до обведенного участка. Если бы не пропало видео - были все шансы сесть на маленькое поле.
Вчера потерял свой долгострой - Бикслер с переломом хвоста. Если кто в понедельник-вторник будет летать и имеет рацию с доступной частотой 433.075 (1 канал LPD) - поставьте ее пожалуйста на прием. Вдруг радиомаяк еще что-то вещает. Хотя в воскресенье было тихо - или самолет лежит за железным забором, или его уже выключили.
Причина падения - отсутствие опыта. Не учел ветер и покрутиться над полосой не вышло, унесло, на обратный путь электричества не хватило. С удаления 1900 и высоты 600, против ветра без двигателя удалось дотянуть до обведенного участка. Если бы не пропало видео - были все шансы сесть на маленькое поле. Но, еслби бы, да кабы - да во рту росли грибы 😃
baychi, спасибо! Это все объясняет. Вчера переделал подключение ppm с аккуратного на временное, но четкое и светодиод зажегся. Приемник пока не проверил, но, думаю, дело в шляпе!
Процедуру бинда провёл полностью строго по инструкции. Время на сканирование частот дал около 2 минут. После того как сделал всё по инструкции и забиндил я выключил приёмник и передатчик. Включил результат такой же. Бинд похоже не запомнился. Связь не устанавливается.
У меня очень похожая ситуация. Бинд проходит успешно, светодиод на приемнике горит, в uart выдает нормальный вывод. Но после снятия питания светодиод на приемнике мигает в такт сигналам СОС, в uart выдает что не получает ничего ни на каком канале. При этом в регистрах у TX и RX частотная сетка совпадает, номер бинда одинаковый. Аппаратура - Turnigy 9x, LRS - 2G. Светодиод на TX мигает при включении, ведет себя в соответствии с инструкцией при бинде, но не горит в остальное время. В связи с этим у меня такие вопросы.
- Как должен вести себя светодиод на TX? Его повдение зависит от наличия PPM на входе?
- Есть ли какая-то спцифика в настройке под 9x, кроме 5, 15 и 17-го регистров?