Activity
Мда… засада с этими корпусами однако Танк Т-34 типы корпусов танка
Я тут в Красноярске каждый день езжу мимо площади Победы, так там два танка стоят Т34-(85?) и ИС-3. Чую надо выяснить что же это за 34-ка да по ней делать. Хоть размеры можно снять будет.
Офигеваю по полной программе. Сам то хотел из пластика делать, а вот посмотрел и засомневался. Одно останавливает- с таким серьёзным изделием мои ребятишки уже просто так не поиграют
Решил сделать радиоуправляемую модель Т34-85. А так как технологическая цепочка производства 😃 находится на в стадии становления решил сделать проект модели в солидворксе. И тут столкнулся с проблемкой - на разных чертежах указывают разные размеры.
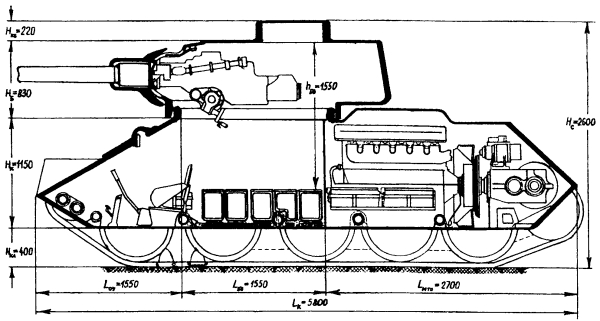
Например длинна :5800
6100 - Руководство по материальной части танка Т-34
А в теме “Чертежи бронетехники” 5736

Ну а если посмотреть на чудо китайского производства Радиоуправляемый танк Т-34, зелёный, 1:16, ИК пушка
с размерами 490 то и вовсе длина реального должна быть 7840 😁
Какой реальный размер то?
Спасибо Иван. Я наверно не правильно выразился. Мне нужно сделать мастер модель, что бы по ней сделать мвтрицу (форму). Так вот из какого материала ее делать- мастер модель, а не форму.
Может полиморфом воспользоваться?
Не в тему! Моторчики то прожорливые на деле оказались. Для расёта схемы драйвера двигателей замерил потребление - при 12В в пике 0,6А жрал, а на холостом ходу 0,35А
Внесу свои 3 копейки 😃
Подарили в 1980-м из Москвы привезли родители. На радиоуправлении а автомат управления неа моторчике(3 рисунок). На первом редуктор.
В свое время пожар был в частном доме, вот он немного и закопчён ))), ствол оплавился и отвалился, пульт скорел напроч(пульт на двух кнопках был)
Сейчас вот его переделываю на современной элементной базе))) чтоб значит через Вай-Фай им управлять. С STM32 на борту)))
о как! А я думал что те кто неприслал уже того, исключены)).
Кстате - надо писать официальный отказ от участия или можно просто птех карт не присылать?
К сожалению руководство несогласовало мой отпуск, так что я теперь просто болельщик.
Вообще я по другому понял вопрос “почему для подобных сценариев выбрали коптер, а не классический вертолёт”. Речь (по моему) шла о сценариях применения микродронов с их сайта, на не про конкурс. Ну да ладно, не хочу дискутировать в любом случае.
😃 А вертолёты уже запрещены?
А ведь требование то вроде как просто вертикальный взлёт.
позволю с Вами не согласиться. лично я поставил себе цель выставить коптера БЕЗ использования дорогостоящих железок. можно сказать собственный профессиональный вызов
. . .
и могу сказать, что на каждый дорогущий прибор измерения найдётся альтернативное решение, мало того, что на порядки дешёвое, так ещё и превосходящее по характеристикам.
так же и в этом конкурсе. можно использовать 3д сканер, а можно подумать и придумать другой способ, не менее эффективный, но в рамках задачи приносящий такие же данные для обработки.
Не буду спорить и переубеждать. Придумать можно многое вместо многого.
Абсолютно согласен, что для поставленной здесь задачи 3Д сканер не является необходимостью. Но позвольте заметить что я говорил в общем, а не только касательно к данной теме.
Ну, я вот тоже например могу себе позволить сканер, и за 1к, и за 5к$. Если 30к на кону - экономический смысл в этом есть.
Не было бы денег - приколхозил бы обычный несканирующий лазерный дальномер за 80$ с поворотом сервой или всего коптера.
Все проблемы имеют массу решений на любой бюджет.
Очень рад за Вас что можете позволить. Уж и не знаю какие там у вас в Москве заработки. Но смысла то экономического как раз не много 😃 Ведь не факт что найдётся кто-то более таланливый, более богатый ну и в конце то концов более везучий. Вы толко не обижайтесь.
Я вот то же решул участвовать. Но я то точно знаю что вероятность моей победы близка к нулю. Я даже не уверен что меня с работы отпустят в августе или что в это время меня в командировку не отправят. Но мнимая вероятность успеха способствует заниматся интересным для меня делом, которое я давно уже хотел занятся ( перейти от наземных ботов к летающим)
Ладно - прошу извинить за лирику.
Это специальное решение, дабы легче движки в резонанс входили, а то расколбаса не хватает 😃
😮:) - хм… а мне казалось что как раз наоборот будет.
Вот придут акселерометры - попробую эксперимент замутить с несбалансированными пропами.
Много или нет - жизнь покажет. Умного народа и за мкадом много, но не все приехать смогут. Опять же случайностей не избежать, что-то сломается, что-то зависнит. Кто-то доделать не успеет.
В общем увидем. А кстате - телевидение будет? “Привет родным” говорить бум? 😃
В этом случае, мне кажется, тех, кто решит эту задачу будет много…
Сказано же по времени отсекать будут
А с кругом посадки все просто - … Делаем дрона 40 см, примерно выравниваем по кругу
Зачем по кругу то? Крест есть.
Кстате задача бы сильно осложнилась если бы кресты да круги были понарисованы то там то сям.
Судя по лопостям - там должен быть подшипник. Кстате тоже это понравилось - с таким расоложением хоть траву коси 😃
Интересно чем?
Ну если в двух словах то тем как они расположили двигатели для того что бы сблизить винты. К томуже поток от верхнего будет не возмущённым для нижнего, что как я думаю приведёт ук уменьшению вибраций. Несравненный минус - это две балки на луч вместо одной.
Лично я обдумывал использование вертолётных решений для каждого луча (ну типа если просто в воздехе держать платформу). Но учень уж меня смущала система перекоса)))
Ни кому, совершенно случайно, в комманду не нужен балласт? 😃
Умею делать умный вид и вид дико занятого человека 😃
Нужен, да уж больно ты далеко Серёга 😃
И второй вопрос - диаметр круга точек посадки
Читай внимательней
Правила проведения соревнований летающих роботов
Описание полигона
8. Маркеры взлета-посадкифизически представляют собой круг из пластика/фанеры с маркировкой, нанесеннойкраской; диаметр круга 3 метра.
точные размеры когда будут известны?
Ответ
Правила проведения соревнований летающих роботов
Условия
1. За сутки до полетовкаждой команде дается точный чертеж полигона. Точность — до погрешности лазерного дальномера.
что для вас небольшая погрешность?
поставьте вместо микромеханики ДНГ (=
Погрешность была порядка 20 санитетров, при длине маршрута порядка 15 метров езды по комнате и автоматическое возвращение в исходную точку. При этом я вовсе неуверен что эти 20 сантиметров из-за погрешности измерения, а не погрешности управления. (как жалко что всё в пожаре погорело, а сейяас так бы пригодилось)
ДНГ - это типа этих ppk.perm.ru/baz.asp?ID=3&gID=16&EL=2
Не нашёл я цену к сожалению, но думаю что она как минимум напорядок больше того же ITG-3200 www.terraelectronica.ru/news_postup.php?ID=2192 . При этом по потреблению и весу mems для леталок предпочтительней. Хотя вот с температурным дрейфом как то не очень.
у меня вроде www.sparkfun.com/products/10612 такой был. Точно немогу сейчас сказать, давно это было.
Прошивки:
· XB24-B:ZNET 2.5 COORDINATOR AT – на земле
· XB24-B:ZNET 2.5 ROUTER/END DEVICE AT – на борту
А можно поинтересоваться - почему не воспользовались Wi-Fi ? Например можно было бы использовать XB24-WFWIT-001
Молодцы Крок с этим конкурсом. Да и денюжка победителю непомешает. Хотя думается мне, что народ и без такого заманчивого пряника стал бы участвовать.
Хотя конечно надо было что-то пообещаь и тем кто на втором и третьем месте будет, ну например сканер лазерный за второе место:)
Всё хорошо… но вот только время самоучек и кустарей прошло. Для того что бы создать действительно что-то стоящее в первую оочередь необходимы узко-специализированные знания. Это и электроника и программирование и в конце концов всё что связано с конструированием летательных аппаратов. Конечно в-принципе возможно собрать команду, члены которой будут обладать необходимыми знаниями. Но это уже не одиночка, а эдакое КБ в миниатюре и п ритом работающее на чистом энтузиазме.
Для воплощения же в жизнь необходимы высокотехнологические комплектующие и соответствующее оборудование.
Вот Крок как организация может себе позволить сканер, а все подавшие заявки нет.
Так что в итоге может получится то же что и с американским конкурсом - масса народа желая получить приз, не имея при этом необходимых знаний или же средств будет выходить со всякими школьными поделками.
Я конечно сильно извеняюсь за свои пессимистические высказывания не несущие в себе никакой ценно информации и относящиеся больше к философии нежели к реальному обсуждению)
Кстати еще аналогичный конкурс - www.uavforge.net/uavhtml/index.php
У этого совершенно конкретная цель - пропылесосить весь мир в поисках людей, занимающихся дронами.
У них есть предквалификация, причем многоступенчатая, и жесткая - из подавших заявки 140 команд и 3500 индивидуальных участников только 9 “живы” к настоящему моменту.
Я особо невчитывался, но увидев абревиатуру DARPA думаю что приз там не 10 тыш зелёных, а поболее будет. и задания там такие что одиночкам без спонсора там делать нечего.
Кстате очень понравилось такое решение :
Может инерциальной?
и скорость далеко не постоянна, плюс вибрации…
Ещё бы батарейки хватило слетать туда - обратно 😃
Хех 😦 правильно, что-то совсем склероз замучил)
как ?
я давно читаю форум . такие штуки тут вычитываю . нобелевка , не меньше…
Наверное я неправильно выразился. но на колёсного робота делал модуль инерционной навигации(3-х осевой аксел+ 3-х осевой мемс+ компас) Маршрут худо-бедно запоминал и обратно возвращался. Конечно с небольшой погрешностью.
Как это будет работат на летающей лоханке - незнаю, но думаю что впринципе возможно
Если использовать MEMS, магнитный корректор и грамотно ввести метео поправки, можем получить увод не более 1 град/мин. На удалении 200 м.(длина маршрута) , средней скорости 3,3 м/с имеем промах 3,5 м. Вероятность успеха более, чем приемлема.
Ну это уже не тупой дрон)))) - это раз
Грамотно ввести метеопоправки как то проблематично.
Но в любом случае - это уже проект требующий творческого подхода к реализации - и как следствие - имеющий право на попытку.
Другое дело если устроители хотели бы обязательно увидеть разработку технического зрения. Тогда конечно.
Хотя а что мне может помешать пролететь меров 35 от поворота (ориентируясь на гиру) и снизившись начать летать зигзагами понадеявшись на датчик линии?
Это вполне правильный подход, едиственное замечание, что это всё не ново и можно взять полностью готовое ПО и железо и оттачивать мастерство настройки.
Ну на самом деле мастерство тут не поможет (перегородку то тягають, точку посадки то же).
Ха! Вот и бюджетный вариант:
- готовый дрон без всяких лишних наворотов
- ставим два ультрозвуковах или ИК датчиков расстояния (один по курсу что бы не долбануться в стенку, один вниз для стабилизации)
- ставим внизу датчик линии.
- через пульт цепляемся к компутеру.
Остальное дело за нормальным алгоритмом. Ведь задача то одна “Вернуться!”
А кстате… можно ли участвовать с двумя дронами? в смысле не сразу а по очереди? ))))
Мы просто укажем, что у коптера должны быть средства поиска маркеров зон посадки и прохода в препятствии.
А зачем? Если уж на то пошло, то даже для того что бы пролететь “на удачу” нужно продумать алгоритм и оснастить покупной дрон дополнительными мозгами, либо написать прогу для управления дистанционно.
Но верноятность благоприятного исхода мала. Это полёт 50 метров , поворот на 90 градусов, полёт как минимум 10 метров, опять поворотна 90 полёт почти 50 метров(при этом надо невписаться в стену перегородки), посадка, полёт обратно.
Короче, даже если бы было известно местоположение перегородки и места промежуточной посадки - без осныщения дрона дополнительными сенсорами это сделать невозможно.
Отсюда следует вывод - даже лохатронщикам придётся потрудится:)
Посмотрел видео об американском конкурсе… ну может задача у них и сложнее, но на мой взгляд лохатрощиков у них предостаточно.
На 100% согласен с Михаилом.
Мы не допустим до соревнований команды, которые взяли готовый коптер (или набор) и хотят на удачу пролететь. Команда должна реализовать средства навигации, взлет-посадку, поиск маркеров посадки.
То что должна - как мне кажется никто и не сомнгевается. А вот как понимать про “готовый коптер”? Брать готовый нельзя?😮
Может я что-то не понимаю… но конкурс объявлен, условие конкурса озвучены и соответственно вроде как те кто зарегистрировался уже подписались под озвученные условия.
Я это к тому, что менять находу условия отбора как-то … ну не очень красиво что ли. Да мне кажется что всё описано более-менее полно. А халявщики сами отсеятся. Если все условия будут выполненны.
Хотелось бы пожелать организаторам не тянуть а сейчас озвучить регламент проведения- как проходит жеребьёвка, кто проводит, кто передвигает препятствие и точку посадки, сколько на это будет даваться времени, это будет происходить во время подготовки учатника к старту или перед подготовкой.
Опять же - откуда такая уверенность что будет однозначный лидер? А если придётся отсеивать по времени? Тогда могут возникнуть претензии что у кого-то трасса длиньше, а к уого-то короче. Может тогда уж передвигать точку промежуточной посадки не в пределах квадрата, а по линии?
Ну и конечно по презентации - лично я вот несовсем понял а что именно надо показать? аппарат который летает? или просто аппарат со словами он у меня будет летать хорошо?