Activity
Мне очень нравится DJI Mavic Pro, это превосходный квадрокоптер, хотя и не без компромиссов. Единственное его слабое место - камера, которая дико шумит. Мой опыт эксплуатации “Мавика” в настоящий момент лишь несколько месяцев, но опыт полётов на квадрокоптерах в целом составляет 4 года без малого. Я выработал некоторую последовательность действий, которая, как я надеюсь, поможет мне не попадать в ситуации, убивающие нервные клетки, и сохранить моего “Мавика” в добром здравии.
ДИСКЛЕЙМЕР
Во многих аспектах, данная статья выражает субъективное мнение автора. Спорить с ним бесполезно, он упёртый.
Дополнительные приобретения
У меня много чего понакуплено, но не всё из этого я использую. Например, я вообще не использую комплект ND-фильтров, так как они нужны для съёмки видео, а я только фотографирую. Итак, три самые полезные покупки для DJI Mavic Pro:
- Чемодан для транспортировки. Компактный, удобный, а главное в него влезает всё, вплоть до домашней зарядки.
- Колпак с фиксатором для подвеса. Гораздо удобнее штатного.
- Складная взлётная площадка. Сейчас зима и она выручает как никогда: бросил на любой сугроб и взлетай. С удлинёнными шасси так не получится. Кстати, они у меня тоже есть, но не использую, так как их приходится постоянно одевать/снимать, с ними квадрокоптер не помещается в чемодан. Площадка тоже всё время лежит в чемодане.

Помимо этого, всегда вожу с собой запасную карту памяти. Из строя они выходят внезапно, а своей памяти у “Мавика” нет. Таким образом, возможна ситуация в поездке, когда и квадрик в порядке и погода лётная, а отснятого материала ноль.
Что нужно сделать перед полётом дома
Я почти всегда прошиваюсь на свежие версии прошивок, но не сразу, а через пару недель, почитав отзывы на форумах. Сейчас, с выходом Mavic Air, обновления выходят каждую неделю, но это временно. В любом случае, после прошивки надо включить квадрокоптер и убедиться, что никаким датчикам не требуется калибровка, а настройки и привязка к пульту не сбросились.
Что нужно сделать перед полётом в поле
Сразу уточню, что под “полем” имеется виду место проведения полёта. Сейчас я больше летаю в городе и тут крайне важно выбрать место взлёта. Надо заранее приблизительно продумать маршрут и встать так, чтобы здания не перекрывали квадрокоптер, иначе крайне вероятна потеря связи. Вдобавок, я стараюсь выбирать наиболее безлюдное место, лишнее внимание ни к чему. Далее я включаю режим “в самолёте” на смартфоне (звонки и уведомления во время полёта мне не нужны). Раньше я ещё выкручивал яркость экрана на максимум, но потом узнал более удобный способ - свайп влево в приложении DJI Go. Открывается специальное меню, где удобно настраивать яркость. Там же можно принудительно задать точку “дом”.
При подготовке самого квадрокоптера к полёту, я пальцами проверяю фиксацию пропеллеров на моторах. Понимаю, что этот ритуал сродни тому, что проделывают водители, обходя свой автомобиль вокруг и постукивая ногой по каждому колесу. А ведь он имеет под собой техническое обоснование.
Если квадрокоптер по какой-то причине не взлетает, в первую очередь надо смотреть, что сигнализирует светодиод на корме. У меня был случай, когда я игнорируя его, искал ошибку в DJI Go, а её там не было. В итоге потерянный день. Кстати, компас калибрую только когда квадрик “просит”.
Во время полёта
Тут, вроде, всё очевидно, но практика показывает иное. Первым делом я взлетаю на такую высоту, чтобы все объекты в зоне полёта были ниже метров на 7-10. При полётах в городе я часто ограничен высотой в 60 метров, но и этого достаточно. Как уже писал, я стараюсь не залетать за здания, чтоб не терять сигнал. Если же такое случается, я постоянно слежу за показателем силы сигнала на пульте. При этом я стараюсь держать в голове, куда мне надо отлететь в случае потери сигнала для его восстановления. Например, если я в низине, то просто вверх. В итоге, если потеря всё же произошла, паники нет, есть конкретное понимание того, что надо сделать в первую очередь.
Кроме того, даже с учётом того, что я летаю выше близлежащих деревьев и зданий, я летаю только передом. Подлёты задом и боком я позволяю себе только на маленькие расстояния при поиске ракурса. Ну и последний момент, при снижении я направляю камеру вниз. Расстояние по ней не очень оценишь, но вот выбрать прогалину между деревьев можно.
Сейчас зима и когда возможно, я летаю из машины. Субъективно на качество связи это не влияет, зато на немеющие пальцы отвлекаться не приходится, а значит можно больше внимания уделить поиску хорошего ракурса.
Буду рад дополнениям и конструктивной критике
Данная статья - лишь небольшая часть. Полная версия у меня на сайте: сборка и настройка. Данную часть я опубликовал здесь ради фидбека и советов более опытных пилотов. Сам я новичок и это всего лишь мой второй опыт настройки квадрика на Cleanflight/Betaflight.
Пожалуй, самой популярной прошивкой на сегодняшний день, вполне заслуженно, является Cleanflight. После её установки достоточно только настроить протокол приёмника и квадрокоптер уже может вполне сносно лететь. Для настройки используется удобная графическая оболочка Cleanflight Configurator, которая лично мне показалась намного удобнее и понятнее, чем OpenPilot GCS.
Благодаря открытому коду прошивки, у неё есть несколько ответвлений (форков). Самым интересным из них является Betaflight от человека под ником Boris B. Прошивка очень динамично развивается и некоторые её “фичи” потом переходят в “родительский” Cleanflight (например, полётный режим Airmode). Минусом Betaflight является то, что релизы выходят достаточно часто, а стабильность их не всегда высока. Кстати, эта причина на несколько недель задержала написание данной статьи. На момент завершения сборки квадрокоптера как раз вышла версия 2.8.0, которая имела пару ошибок и отличалась недружелюбными дефолтными настройками. Очень быстро появилась исправленная версия 2.8.1 RC1, но опыт работы программистом подсказал мне, что лучше подождать релиза. Я не прогадал, так как одновременно с релизом версии 2.8.1, появился и Betaflight Configurator. Можно сказать, что это новый этап в истории данной прошивки. Дело в том, что по мере своего развития Betaflight всё больше и больше отдалялся от Cleanflight и конфигуратор последнего становился всё более и более бесполезным, так как основная часть настроек всё равно делалась через консоль CLI.
Ниже я подробно опишу, как я настроил свой квадрокоптер через Betaflight Configurator.
Вкладка Setup
Сделал калибровку акселерометра.
Вкладка Ports
- Для того, чтобы работала OSD, включил MSP для порта UART2.
- Как я уже писал выше, ни в коем случае не отключайте MSP для порта UART1.

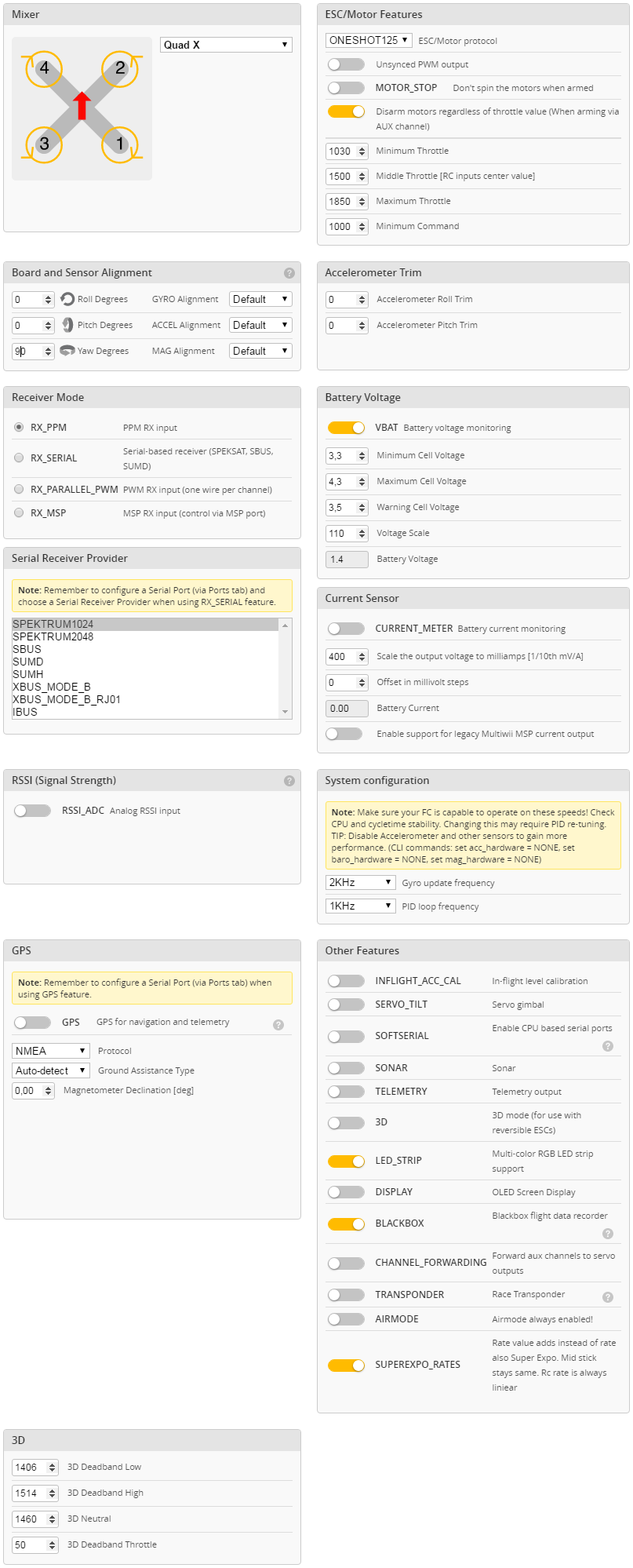
Вкладка Configuration
Собственно тут и производятся почти все настройки.
- В разделе “Board and Sensor Alignment” указал, что мой ПК повёрнут на 90 градусов по оси yaw. Корректность этого параметра потом можно проверить во вкладке Setup.
- В “Reciever Mode” выбрал RX_PPM.
- Выбрал ONESHOT125 в качестве протокола регуляторов (почему не MULTISHOT, я писал выше).
- Отключил “Unsynced PWM output”, опять же, потому что не использую MULTISHOT.
- Чтобы моторы всегда вращались в заармленном состоянии, отключил MOTOR_STOP.
- Включил опцию “Disarm motors regardless of throttle value”, так как буду делать арм моторов на отдельном канале.
- Уменьшил значение “Minimum Throttle” до 1030. Это обороты холостого хода, подбирал субъективно.
- Включил опцию “VBAT” для активации индикатора заряда батареи. Остальные параметры в разделе “Battery Voltage” я не менял, так как показания заряда соответствуют действительности. Если же в них есть погрешность, её можно убрать настройкой “Voltage Scale”.
- В “Other Features” активизировал BLACKBOX, а также LED_STRIP, чтобы работала светодиодная подсветка.
Вкладка Failsafe
C failsafe всё оказалось несколько сложнее, чем мне виделось ранее. На профильных форумах иногда встречаются холивары на тему “где лучше настраивать failsafe: на приёмнике или на ПК?” На самом деле, правильно это вопрос звучит так: “где лучше настраивать failsafe: только на приёмнике или на приёмнике и на ПК?”
Настраивать failsafe на приёмнике необходимо в любом случае. По крайне мере, на Frsky D4R-II, который я использую. Дело в том, что у него есть три варианта поведения при потере сигнала от передатчика:
- передать на ПК сигнал, имитирующий предустановленные положения стиков и переключателей (режим Pre-set Positions, именно он и описан в мануале)
- продолжать передавать на ПК последние данные, полученные от передатчика (режим Hold Last Position)
- прекратить передавать сигнал на ПК (режим No Pulse)
По умолчанию в Frsky D4R-II установлен режим Hold Last Position, который способствует улёту аппарата в далёкие дали. Так что если использовать failsafe только на приёмнике, надо настраивать режим Pre-set Positions. Другое дело, что failsafe активируется даже при кратковременной потере сигнала. Будет очень неприятно, если сигнал через долю секунды восстановиться, а квадрокоптер уже задизармил моторы и падает вниз. Ситуацию может улучшить настройка failsafe на ПК, так как там этот режим имеет задержку срабатывания, что служит фильтром от кратковременных потерь сигнала. Кроме того, там есть настраиваемый сценарий, согласно которому квадрокоптер будет себя вести в случае активации failsafe. Например, можно включить режим со стабилизацией и попытаться более-менее мягко сесть или вообще активизировать RTH, если он есть. Но на практике такие вещи востребованы на больших аппаратах с GPS, а на маленьких и быстрых, опытные пилоты советуют не мудрить и выключать моторы после потери сигнала. Из-за высокой скорости полётов, так будет безопаснее для окружающих.
Нюанс в том, что, если на приёмнике установлен режим Pre-set Positions или Hold Last Position, то ПК даже не узнает, что произошла потеря сигнала. Таким образом, failsafe на ПК можно использовать лишь в том случае, если на приёмнике установлен режим No Pulse. На Frsky D4R-II он устанавливается кратковременным (менее 1 сек) нажатием на кнопку failsafe при выключенном передатчике (видео-инструкция).
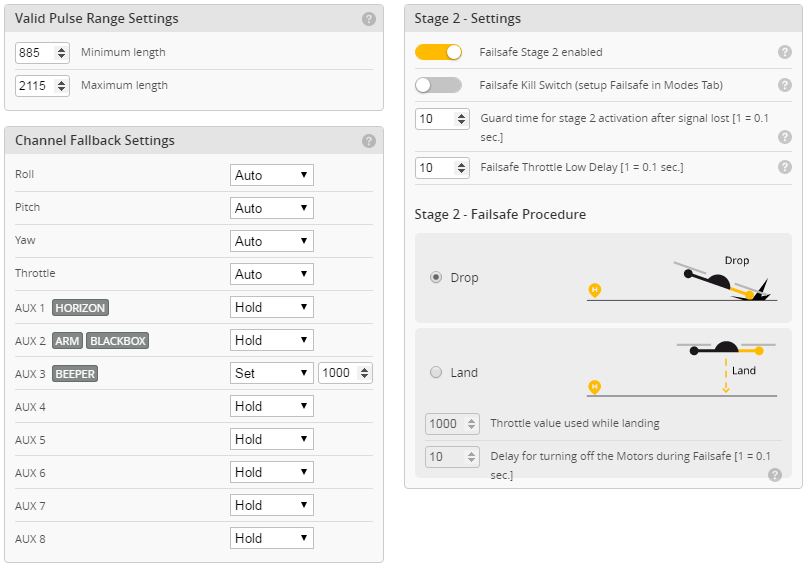
На вкладке Failsafe Betaflight Configurator`а я сделал следующее:
- В разделе “Channel Fallback Settings” установил значения переключателей передатчика, которые нужно будет сымитировать. В моём случае только включил пищалку на AUX3.
- Активизировал Failsafe Stage 2.
- Установил задержку активации режима failsafe 1 сек (значение 10 в пункте “Guard time for stage 2 activation…”)
- Установил время работы моторов после активации failsafe 1 сек (значение 10 в пункте Failsafe Throttle Low delay).
- В Failsafe Procedure выбрал сценарий с падением (Drop), а не с попыткой плавного приземления (Land).
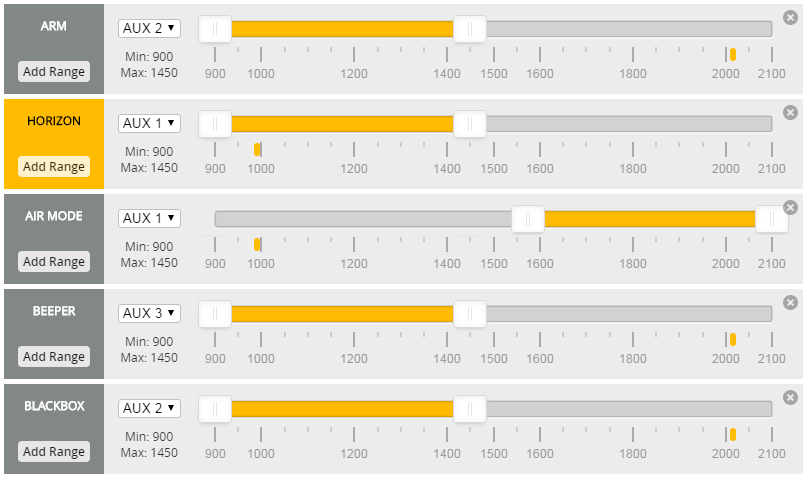
Вкладка Modes
Повесил на переключатели арминг моторов и Blackbox (AUX1), активацию полётного режима Horizon (AUX2) и включение пищалки (AUX3). Кстати, есть люди, которые настраивают арминг на два переключателя. Не знаю, насколько это востребовано, сам я ещё такого уровня дзэн не достиг.
Отдельно хочется сказать про AIRMODE. Изначально он был уникальной “фишкой” Betaflight, но в какой-то момент стал так популярен, что Boris B поделился им с авторами Cleanflight и сейчас данный режим доступен и там тоже.
Несмотря на то, что AIRMODE отображается как отдельный режим полёта - это скорее дополнительная опция, а не полноценный режим. Он позволяет квадрокоптеру удерживать заданный угол даже при минимальном газе. Именно поэтому не рекомендуется использовать AIRMODE вместе с режимами со стабилизацией. Кроме того, приземление с AIRMODE тоже процесс непростой: квадрокоптер начинает прыгать, как лягушка. Опытные пилоты предпочитают просто “ронять” квадрокоптер, выключая моторы в паре десятков сантиметров над землёй. Кстати, если у вас включена остановка моторов при нулевом газе (опция MOTOR_STOP во вкладке Configuration) и одновременно с этим работает AIRMODE, то остановки моторов не будет, так как AIRMODE имеет более высокий приоритет.
В Betaflight версии 2.8.1 появилась новая возможность: можно включить AIRMODE в фоновом режиме и тогда он активен всегда и не будет отображаться во вкладке Modes, либо, как и ранее, повесить его включение на какой-либо канал. Делается это следующими командами в CLI:</p>
feature AIRMODE # Включить AIRMODE в фоновом режиме
feature -AIRMODE # Выключить AIRMODE в фоновом режиме
У себя я не стал включать AIRMODE в фоновом режиме, так как использую ещё режим со стабилизацией HORIZON. Таким образом, у меня на AUX1 два полётных режима: HORIZON (для полётов со стабилизацией и посадки) и ACRO+AIRMODE.
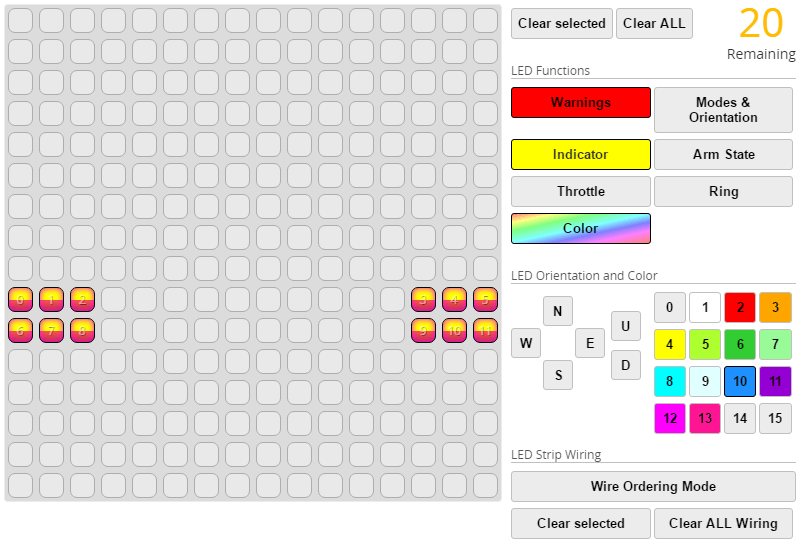
Вкладка LED Strip
Настроил свою подсветку на отображение предупреждений, индикацию поворотов/торможения и свечение синим цветом, когда ничего из этого нет.
Вкладка Blackbox
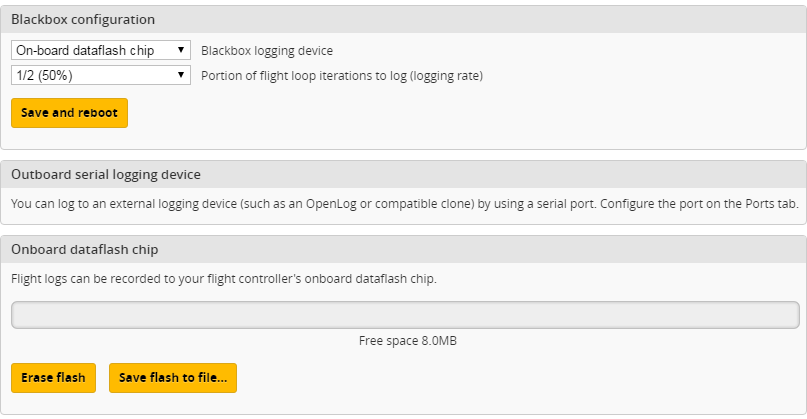
Blackbox - это “чёрный ящик” квадрокоптера. Нужен для диагностики, более точной настройки PID, а также чтобы можно было наложить инфографику на полётное видео (как тут). Данные пишутся на внешний логгер или, если того позволяет объём памяти, на внутреннюю память ПК. Например, у Naze32 Acro её недостаточно, а у Naze32 Deluxe и SPRacingF3 Acro - хватает, хотя и не намного. При настройках по умолчанию, на 2Мб памяти можно записать данные полёта продолжительностью 3-4 минуты, что весьма мало. Усугубляет ситуацию то, что реализовать запись “по кругу”, как в автомобильных регистраторах, здесь невозможно из-за низкой скорости чтения/записи памяти. Единственный вариант - уменьшить в несколько раз скорость записи. Для диагностики такие данные уже будут малопригодны, а для видео - самое то. В этой вкладке я сделал следующее:
- Выбрал запись на внутреннюю память (опция “On-board dataflash chip”) в разделе “Blackbox logging device”.
- В разделе “Portion of flight loop iterations to log” выбрал 50%, что по сути уменьшает скорость записи вдвое.
Как я уже писал выше, логгирование запускается тем же тумблером на аппаратуре, что и арминг, чтобы запись начиналась при старте моторов.
Вкладка CLI
CLI - это консоль, через которую можно менять уже более продвинутые настройки, а также делать резервную копию всех настроек. Я сделал следующее:
set small_angle = 180 # Включить возможность армить моторы даже в перевёрнутом состоянии
set vbat_pid_compensation = ON # Включить компенсацию PID при разрядке батареи
save # Сохранить настройки
Также в Betaflight есть очень полезная возможность подключения к OSD через ПК. Теперь можно запрятать эту платку подальше, не беспокоясь, что к ней может понадобиться подключиться. Для подключения к плате OSD через ПК необходимо подключить батарею к квадрокоптеру, затем набрать в CLI команду serialpassthrough с необходимыми параметрами, затем отключить (Disconnect) Betaflight от ПК и запустить MWOSD. У меня получилось с первого раза. По поводу параметров, то для Micro MinimOSD, подключенной к UART2 (мой случай) они таковы:
serialpassthrough 1 115200
На этом настройка полётного контроллера закончена.
Настройка передатчика
Передатчик (он же “пульт”) каждый пилот настраивает индивидуально: таймеры, миксы, голосовые уведомления и прочее. Единственная вещь, сделать которую крайне желательно, это проверить минимальные, средние и максимальные значения стиков управления в конфигураторе. Делается это во вкладке Reciever. Идеальные значения составляют 1000 - 1500 - 2000. В моём случае они составляли 996 - 1508 - 2020, что не очень хорошо. Во-первых, “выпадения” за пределы диапазона (значения менее 1000 и более 2000) плохи сами по себе. Во-вторых, центральное положение, отличное от 1500, будет восприниматься ПК, как лёгкое подруливание, которое он будет отрабатывать и квадрокоптер постоянно будет сносить в какую-то сторону. Словом, имеет смысл повозиться и настроить “как надо”.
Как настроить эти значения на передатчике Taranis, показано здесь. У меня Turnigy 9XR PRO, там это делается в пункте Limits. Также можно выполнить настройку через программу eePskye (вкладка Limits), но это неудобно, так как результат сразу не видно в Betaflight Configurator. Сделать это необходимо для каждого из четырёх каналов управления.
После настройки центральные значения максимально приблизились к 1500, но у меня они начали “прыгать” примерно на 5 единиц в одну или другую сторону. Не знаю, с чем это связано, вероятно, значения пульта являются пограничными для ПК и после их округления получается такой эффект. Для решения этой проблемы в Betaflight (и CleanFlight тоже) есть специальная команда, настраивающая фильтрацию подобных вещей.
set deadband = 6
Значение может быть от 0 до 32 и с его повышением чувствительность управления снижается. Управление становится более мягким. Надо понимать, что после определённого порога мягкость превратится в ватность, поэтому для себя я выбирал минимальное значение, при котором дёрганья исчезли.
На этом всё, удачных полётов! Буду рад комментариям и замечаниям.
Полная версия статьи со всеми фотками находиться тут, а фотоальбом отдельно - здесь.
Настройка CC3D
Первое подключение батареи - процесс достаточно ответственный. Если где-то накосячили с проводкой, можно что-нибудь сжечь. Поэтому очень рекомендуется при первом подключении использовать 12-вольтовую автомобильную лампочку. Она подключается последовательно в цепь между батареей и квадрокоптером и служит, как предохранителем, так и индикатором: если она не горит - всё в порядке, если горят ярко - где-то замыкание, но никакие детали не сгорят.
Также очень желательно при подключенной батарее проверить мультиметром раму и лучи. Как я уже писал выше, часто бывает так, что болтик, которым крепится мотор, повреждает изоляцию и замыкает питание одного или нескольких моторов на раму. Последствия бывают самые разные: у кого-то сразу идёт дым из мотора, а у кого-то квадрокоптер летает, но не очень адекватен в управлении.
Теперь непосредственно настройка CC3D. Она хорошо показана у Юлиана, здесь или здесь, так что я не буду подробно её расписывать, остановлюсь лишь на некоторых моментах.
Программу OpenPilot можно скачать здесь, причём надо брать не последнюю версию (на момент написания статьи - 15.05.02), а версию 15.02.02, так как все последующие не поддерживают полётный контроллер CC3D.
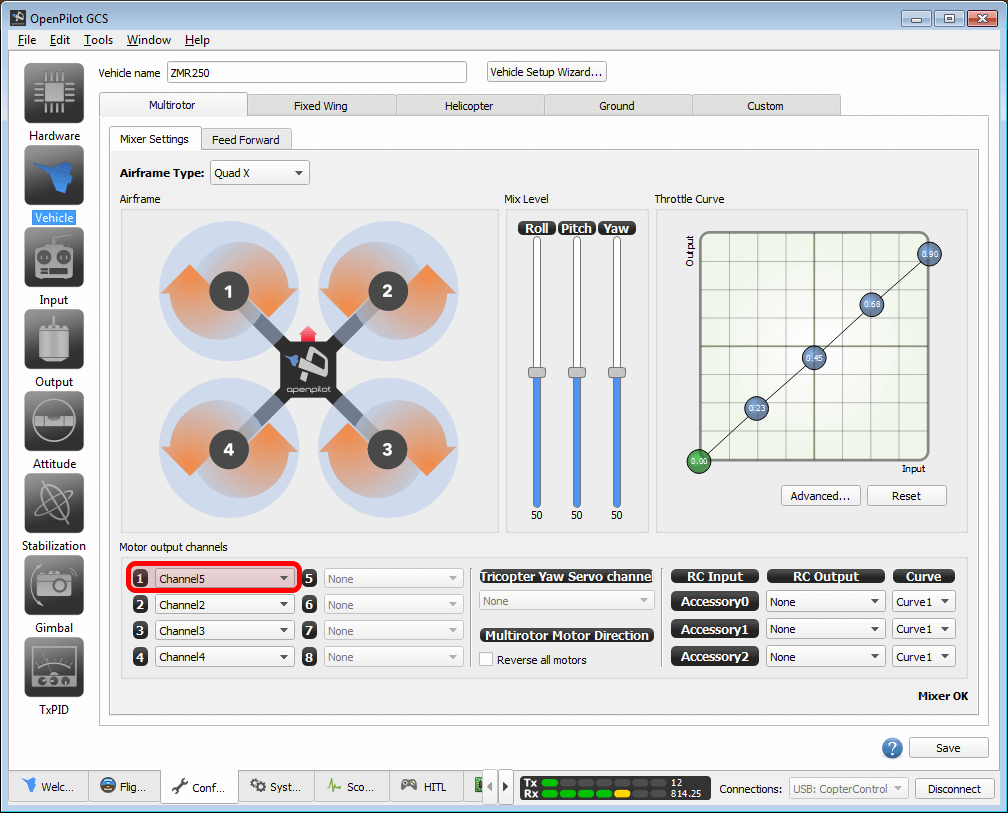
При прохождении “Мастера настройки” я застопорился на калибровке регуляторов. Дальнейшее копание показало, что во время пайки я немного перегрел плату ПК и у неё отошёл сигнальный контакт регулятора первого мотора. Неприятность, но не проблема: я переназначил первый мотор на пятый канал. Пришлось полностью разобрать квадрокоптер и заново припаять провода к ПК. Тогда же я развернул ПК на 90 градусов.
“Мастера настройки” мне теперь было не пройти (на этапе калибровки регуляторов он “искал” первый регулятор на первом канале), так что пришлось всё настраивать вручную.
- В разделе “Vehicle” я, как и писал выше, переназначил первый мотор на пятый канал.
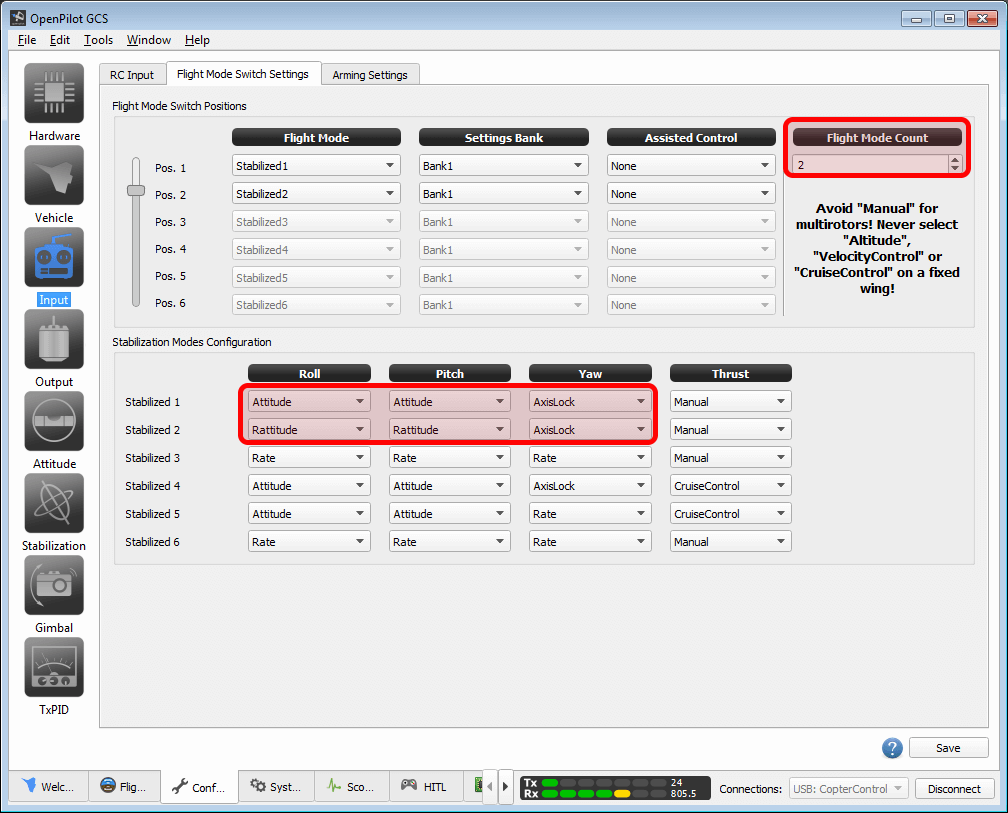
- Во многих видео (например, в двух из трёх, что я привёл выше) пилот использует двухпозиционный переключатель для смены полётных режимов, но при этом оставляет в OpenPilot три режима, как это сделано по умолчанию. В итоге нормально используются первый и третий режим, а второй активизируется на долю секунды при переключении. Это кажется мне как минимум нелогичным, ведь можно просто установить в OpenPilot реально необходимое количество режимов, то есть два. Делается это во вкладке “Flight Mode Switch Settings” раздела “Input”, пункт называется “Flight Mode Count”.
- Там же я выставил полётные режимы “Attitude” (полная стабилизация) и “Rattitude” (полная стабилизация, но при сильном отклонении стиков управление, как в ручном режиме, что позволяет делать флипы). Среди опытных пилотов более популярен режим “Rate”. В нём нет никакой стабилизации, то есть при наклоне стика Pitch вперёд, квадрокоптер наклоняется вперёд, при возврате стика в нейтральное положение, квадрокоптер остаётся под тем же наклоном. Для возврата квадрокоптера в горизонтальное положение, необходимо отклонить стик назад и потом опять вернуть в нейтральное положение.
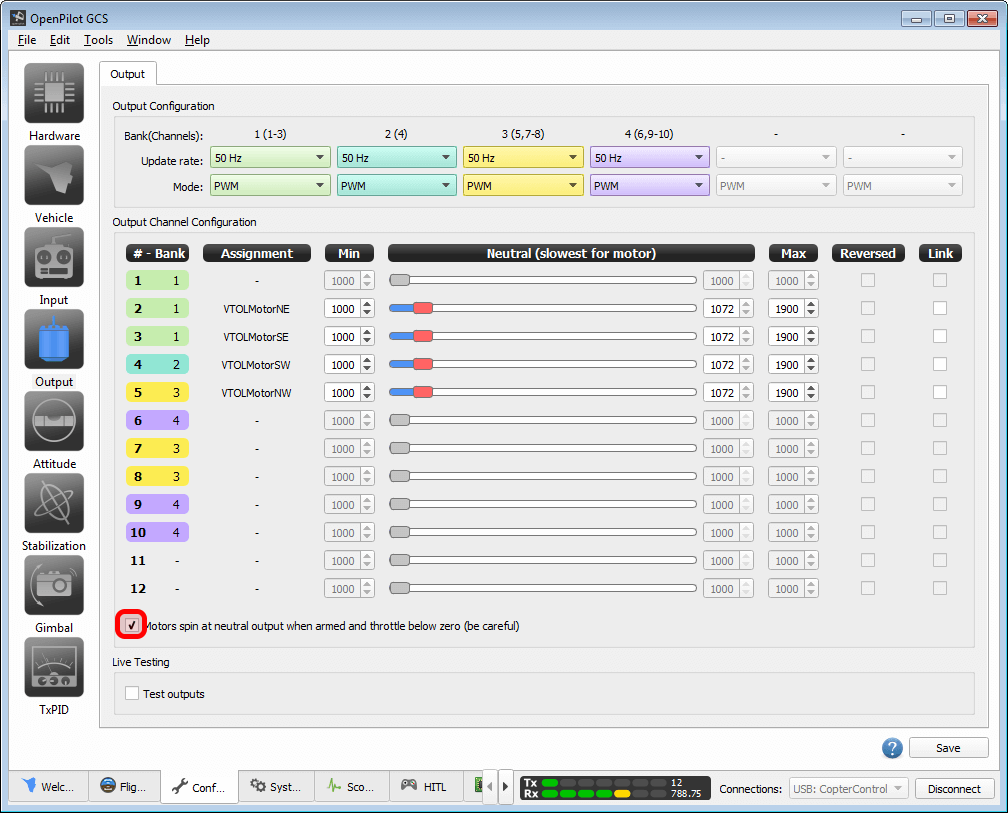
- Откалибровал регуляторы моторов. Без “мастера” это делается таким образом: первым делом надо снять пропеллеры и отсоединить батарею, далее в разделе “Output” надо сначала поставить галочки “Link” напротив всех моторов, затем галочку “Test outputs”, после этого передвинуть все ползунки максимально вправо (так как они связаны, они будут сдвигаться вместе). Теперь нужно подключить батарею, подождать когда регуляторы пропищат и после этого передвинуть ползунки максимально влево. Регуляторы должны ещё раз пропищать и тогда можно выставлять им стартовый газ.
- Там же в разделе “Output” я поставил галочку “Motors spin at neutral output…”, но сразу скажу, что это шаг опциональный. При включении этой опции моторы будут начинать крутиться сразу при арминге и не будут останавливаться, если газ сброшен до нуля.
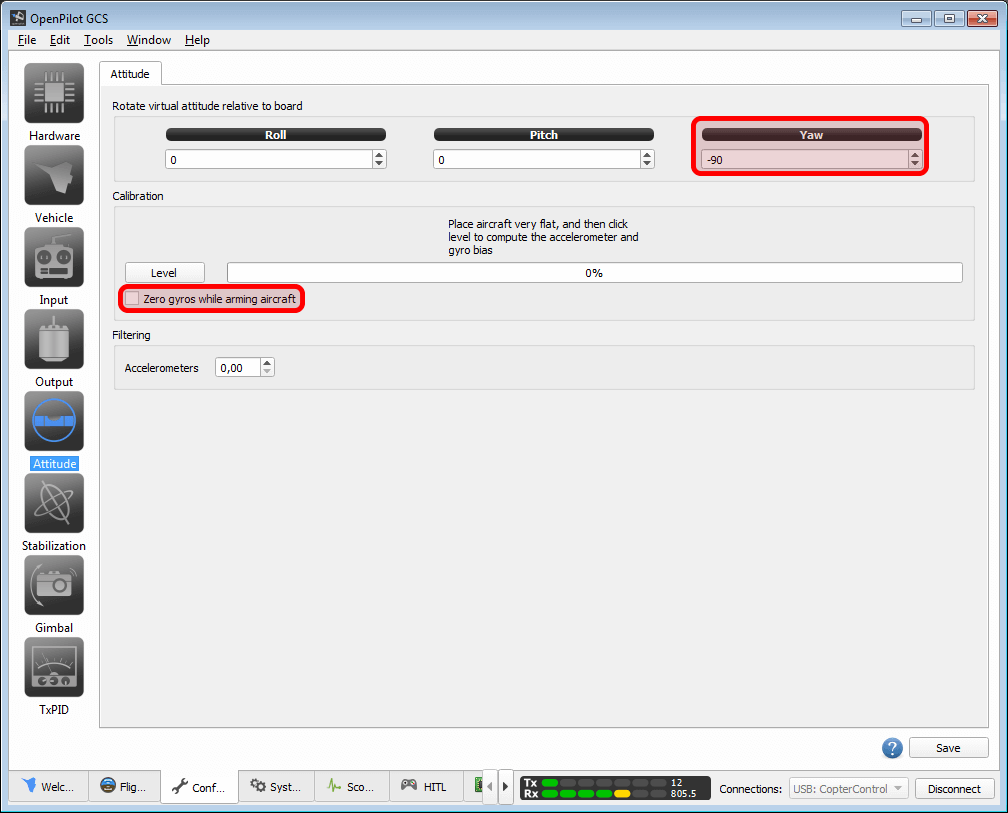
- В разделе “Attitude” я выставил значение yaw -90, так как развернул ПК на 90 градусов по часовой стрелке. Правильность этого параметра можно сразу проверить во вкладке “Flight Data”.
- Там же в “Attitude” есть опция “Zero gyros while arming aircraft”, на которую стоит обратить внимание. Она позволяет калибровать гироскоп при арминге моторов. Если её отключить, то полётный контроллер каждый раз при старте будет брать усреднённые последние показания гироскопа. При включении этой опции при арминге будет производиться калибровка, но квадрокоптер при этом должен стоять неподвижно (не обязательно идеально ровно).
PID и кривую газа я оставил дефолтными. Это очень индивидуальные параметры: PID учитывают массу, развесовку и технические параметры модели, а кривая газа - личные предпочтения пилота. Настраивать их надо непосредственно под себя. С кривой газа есть такой нюанс, что в любом случае, точка максимального газа (самая правая) должна стоять на 90% (так она и стоит в настройках по умолчанию). Дело в том, что по факту все моторы и все регуляторы на квадрокоптере чуть-чуть разные и при идентичном напряжении выдают немного разное количество оборотов. ПК нивелирует это, где-то чуть повышая обороты, где-то чуть понижая их. Если поставить точку максимального газа на 100%, при полном газе повышать обороты будет некуда и квадрокоптер может уводить в какую-либо сторону. Если же установить эту точно на 90%, “пространство для манёвра” будет всегда.
На этом я завершаю первую часть этой статьи. Квадрокоптер собран и он летает, но надо понимать, что он изначально расчитывался под FPV, а так как этого оборудования пока не установлено, в нынешнем состоянии развесовка квадрокоптера далека от идеальной. Собственно, во второй части я расскажу об установке FPV и только после этого можно будет затронуть тему настройки PID. Кстати, вес квадрокопрера составил около 360 грамм без батареи.
Полная версия статьи со всеми фотками находиться тут, а фотоальбом отдельно - здесь.
Сборка квадрокоптера
Сборка квадрокоптера - процесс творческий. Вариантов компоновки не счесть, так что можно поднапрячь своего инженерного гения. В любом случае, перед началом надо запомнить несколько важных вещей:
- Карбон проводит ток. Так что всё надо хорошо изолировать, чтобы нигде ничего не замыкало на раму.
- Всё, что выступает за пределы рамы, при аварии вероятнее всего, будет сломано или оторвано. В данном случае речь идёт, в первую очередь, о разъёмах. Провода тоже могут быть перерублены винтом, так что и их надо прятать.
На одном из форумов я увидел такую фразу:
впихнуть невпихуемое - всегда было романтикой авиастроения
И с тех пор она не выходит у меня из головы. Дело в том, что рама ZMR250 спроектирована таким образом, что регуляторы крепятся на лучах, вся остальная электроника помещается внутрь рамы, а батарея располагается на верхней пластине “снаружи” рамы.
Но при такой компоновке, при падении батарея с вероятностью, стремящейся к 100%, отвалится и, скорее всего, повредится. Поэтому я отошёл от такого расположения деталей и решил поместить электронику вниз рамы, между двух пластин, фиксирующих лучи. У кого нет доступа к 3D-принтеру, используют металлические (чаще всего латунные) проставки, ну а я для этого распечатал проставку. Дополнительным её плюсом является место для разъёма XT60. Я вообще сторонник того, что разъём питания надо фиксировать на плате, а не оставлять провод болтаться, так как в случае аварии его может легко перерубить пропеллером.
И только приложив к раме проставку, я понял, насколько невпихуемое мне придётся впихнуть. Началась своего рода борьба за миллиметры и на алтарь компактности легло многое. Сразу стало ясно, что все контакты на полётном контроллере для подключения регуляторов придётся удалять и паять провода напрямую. Здесь очень полезной оказалась плата распределения питания Diatone. Она позволила сэкономить места за счёт проводов, но у неё есть несколько неприятных нюансов. Во-первых, в сочетании с карбоновой рамой (мой случай), при закручивании болтиков можно поцарапать ими лак на плате, что может привести к короткому замыканию (примерно так). Жалоб на это было действительно много, так что новые версии платы поставляются вместе с картонными шайбами, которые надо ставить под болты. Во-вторых, BEC’и на этой плате весьма посредственные и из-за особенности конструкции сильно греются, так что многие пользователи их меняют. Вдобавок, токи они выдают слабые - 0,5А. Также были случаи, когда при запуске моторов происходил скачок напряжения на 5-вольтовом BEC’е и то, что к нему подключено, сгорало. Третьим моментом является то, что отверстия для болтов на этой раме не соответствуют оным на деталях рамы. Устраняется надфилем.
Короче, на Diatone ZMR250 PDB я смотрел с опаской. Её BEC’и я демонтировал сразу. Благо везде, кроме полётного контроллера, можно было использовать 12В напрямую с батареи. На нижней стороне платы расположены контакты для подсветки, но я не планировал их использовать, так что следовало заизолировать их, иначе могут “коротнуть”, если сесть, например, на мокрую траву. Я покрыл плату лаком Plastik 70 в несколько слоёв, предварительно прикрыв изолентой все нужные мне контакты. Не всем он нравится (например, потому, что препятствует охлаждению), но никакого другого изолирующего средства у меня не было. В любом случае, хорошая изоляция крайне важна. Здесь можно узнать, какие ещё варианты изоляции плат существуют.
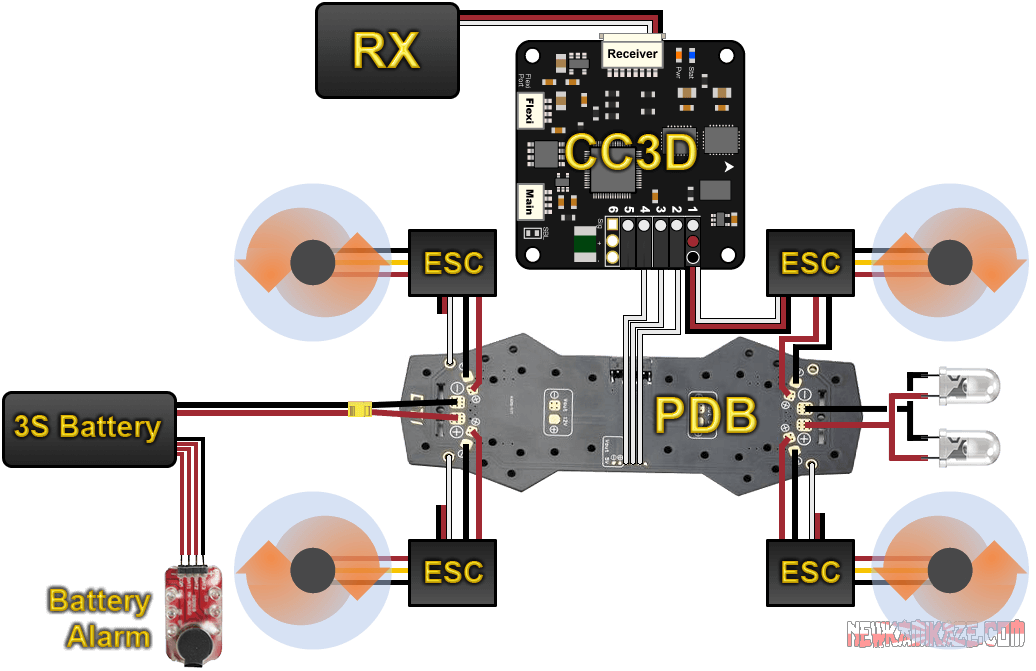
По проводке вырисовывалась такая схема: все регуляторы питались напрямую от батареи, от первого регулятора к полётному контроллеру идут все три провода управления (для обеспечения питания ПК), от остальных регуляторов - только сигнальный (белый) провод. Надо сразу понимать такой момент: BEC первого регулятора будет питать ПК и через него ещё и приёмник. Регулятор RCTimer 12A SimonK выдаёт 2А, чего вполне достаточно. Если силы тока недостаточно, то питающий регулятор может отключаться во время полёта, что приведёт к аварии. “Пищалка” для батареи, как и положено, будет крепиться к балансировочному разъёму.
Часто на пятый канал ПК ставят ещё одну “пищалку”, (такую), которую можно активизировать с пульта, если квадрокоптер потерялся. Хотя сразу надо сказать, что не очень стоит на неё надеятся, так как при большинстве аварий (особенно, если батарея расположена сверху рамы, а не внутри, как у меня), как уже писалось выше, батарея отлетает, квадрокоптер обесточивается и все “пищалки” перестают работать. Для этого случая у меня ещё есть GPS-трекер. Тем не менее, вот пара ссылок, которые могут помочь при установке “пищалки” и настройке передатчика:
- Setting up a Discovery Buzzer with Taranis and FRSKY D4R-II on CC3D
- видео mr. FlyMode (на русском)
- видео Painless360
- видео FunFly FPV
Теперь непосредственно сборка. Она очень хорошо показана у Юлиана, так что я буду опираться на это видео. Итак, начал я с самого простого - моторов. Сначала я удалил с лучей недоразумение, выполняющее роль шасси, а затем прикрутил адаптеры пропеллеров, отбалансировал моторы, и припаял их провода к регуляторам, сохраняя необходимое направление вращения (2 мотора по часовой стрелке и 2 - против). С регуляторами на прошивке BlHeli направлением вращения можно не заморачиваться, так как его можно изменить программно. Провода между моторами и регуляторами я старался делать как можно короче. Во-первых, из соображений компактности, а во-вторых, длинные провода переменного тока создают достаточно большие шумы.
После этого я закрепил болтами на лучах защитные кожухи и моторы (здесь и далее все резьбовые соединения скрепляются Локтайтом). Для моторов я использовал не штатные болтики, а M2 x 6мм. Дело в том, что 7мм болтики из комплекта могут повредить изоляцию проводов и замкнуть их на раму.
Отдельно хочется сказать про крепление регуляторов: где и чем? Их можно закрепить на луче и под ним. Я выбрал первый вариант, так как мне кажется, что в этом положении регулятор более защищён (это мои домыслы, не подтверждённые практикой). Вдобавок, при креплении на луче, регулятор отлично охлаждается воздухом от пропеллера. Теперь о том, как закрепить регулятор. Способов много, наиболее популярный - двухсторонний скотч + одна-две стяжки. “Дёшево и сердито”, к тому же демонтаж трудностей не доставит. Хуже то, что при таком креплении можно повредить плату регулятора (если ставить стяжку на неё) или провода (если крепить на них). Так что я решил крепить регуляторы термоусадочной трубкой (25мм) и запаял их вместе с лучами. Есть один нюанс: сам регулятор тоже должен быть в термоусадке (мои в ней и продавались), чтобы не соприкасаться контактами с карбоном луча, иначе - КЗ.
Забегая вперёд, скажу, что такой вариант крепления хорош только на один раз. Если по какой-то причине пришлось срезать термоусадку, новую уже не одеть, так как с одной стороны регулятора уже припаян мотор, а с другой - PDB. В итоге я вышел из положения закрепив регулятор к лучу двухсторонним скотчем и обмотав их обоих изолентой по всей длине регулятора.
Далее я припаял провод питания к PDB и закрепил проставку и лучи. Изначально хотелось поставить лучи поверх проставки, но такой вариант затруднял проведение проводов, так что пришлось ставить под неё. Маленькую деталь, зажимающую разъём XT60 (из файла Unibody_CC3D_XT60.stl) я не стал ставить, так как она была великовата. Вместо этого я приклеил разъём к большой проставке двухсторонним скотчем.
После этого можно было паять все необходимые провода от регуляторов к плате распределения питания. Также я сразу вывел два 2-контактных разъёма с питанием 12В (через них будут питаться “фары” и видеопередатчик для FPV) и припаял 3-контактный разъём-“маму” к дорожкам, идущим к регуляторам (2-й, 3-й и 4-й регуляторы). Затем я покрыл верхнюю сторону платы изолирующим лаком и на всякий случай наклеил изоленту в место соприкосновения с лучами. С пайкой PDB было покончено.
С полётным контроллером я разобрался быстро: отпаял все контакты для регуляторов и припаял вместо них два 3-контактных разъёма-“папы”: на 1-й канал (для обеспечения питания ПК) и на сигнальные контакты 2-го, 3-го и 4-го каналов. После этого я опять же покрыл полётный контроллер лаком в несколько слоёв, предварительно прикрыв изолентой все разъёмы. Чтобы провода в месте спайки с платой не отломались от вибраций, разумно нанести немного термоклея. Когда лак высох, я взял 4 нейлоновые проставки, укоротил их до минимально возможного размера и жестко закрепил на них полётный контроллер к PDB.
Некоторые моделисты пытаются демпфировать его специальными площадками (в моём случае она шла в комплекте с ПК) или пено-скотчем ради уменьшения количества вибраций, получаемых ПК. На форумах не советуют этого делать, так как очень трудно настроить фильтрацию частотных помех, эти помехи просто не доходят до контроллера и ситуация только ухудшается. Лучшим подходом является жесткое крепление ПК и использование программной фильтрации (если это возможно). Кроме того, сам гироскоп имеет встроенный низкочастотный фильтр.
Так же надо сразу подумать о том, что подключать полётный контроллер к компьютеру придётся неоднократно и каждый раз разбирать для этого раму - верх непрактичности. Следовательно, надо обестпечить доступ к USB-разъёу контроллера. Мне для этого пришлось развернуть ПК на 90 градусов (чтобы USB-разъём оказался по левому борту) и сделать прорезь в проставке.
Следующим этапом стало подключение приёмника. На самом деле, изначально я купил FrSky V8FR-II, но чтобы он поместился внутрь проставки пришлось бы убирать у него корпус и отпаивать контакты. В итоге я решил, что разумнее будет заказать приёмник, который поместится без лишних манипуляций, вдобавок сэкономит вес и место - FrSky D4R-II. Ещё одним его плюсом является возможность использования протокола PPM (фазо-импульсной модуляции), в то время, как с FrSky V8FR-II - только PWM (широтно-импульсная модуляция). Плюсами PPM-подключения являются меньшее количество проводов (всего три, так как используется только один канал) и 8 каналов (в режиме PWM приёмник FrSky D4R-II имеет только 4 канала, а этого недостаточно). Минус - задержка сигнала, хотя не всякий пилот её заметит, а начинающий и подавно.
Если говорить о задержке сигнала, то у протоколов PPM, PWM и сателлитов Spektrum обновление данных происходит каждые 22мс. Гораздо быстрее работает протокол S.Bus. Его время обновления составляет всего 7мс. Вдобавок, протоколы PPM и PWM требуют дополнительного декодирования в контроллере, так что их реальная задержка - это время обновления + время декодирования. В итоге, для PPM задержка составляет ~88мс, так как используется скользящее среднее по четырем сэмплам. Кроме того, как писалось выше, на CC3D OneShot работает только при подключении PPM или S.Bus и это тоже следует помнить. Здесь можно прочитать подробнее о разных протоколах подключения.
Подключение приёмника полностью описано в официальной документации, в этой статье либо в этом видео. Так как я использую PPM, но не использую OneShot, мне нужно подключать лишь один 3-контактный разъём (№1 на фото ниже) к 1-му каналу приёмника. Также надо установить джампер-перемычку на сигнальные контакты 3-го и 4-го каналов, чтобы активизировать PPM.
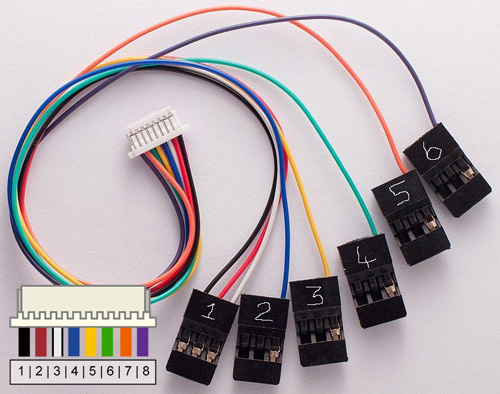
Перед подключением обязательно надо проверить расположения проводов питания на 8-контактном разъёме кабеля, который идёт вместе с CC3D. Так как это китайское производство, бывали случаи, когда провода меняли местами и при включении приёмник сгорал. Правильное расположение такое: слева (1-й контакт) - чёрный провод (“минус”), справа (2-й контакт) - красный (“плюс”). Все остальные провода я отрезал и заизолировал. Сам приёмник я закрепил двухсторонним скотчем, но не к нижней, а к средней плате рамы. В этом случае я могу намертво закрепить антенны приёмника, а при разборке квадрокоптера просто отсоединять кабель от приёмника. Антенны я вывел по стойкам рамы на самую верхнюю плату, где закрепил на стяжках (как в видео Юлиана). Все стойки (с антеннами и без) я для красоты запаял в термоусадку (5мм).
Идея, пришедшая мне в голову уже после сборки: перевернуть приёмник и приклеить его так, чтобы светодиоды и кнопка F/S были видны в прорезь пластины рамы. В этом случае приёмник можно перебиндить без разборки квадрокоптера.
Кстати, так как стойки выполнены из достаточно мягкого алюминия, штатные болтики “съедают” резьбу за несколько разборок. Поэтому я использовал более длинные 15мм болтики.
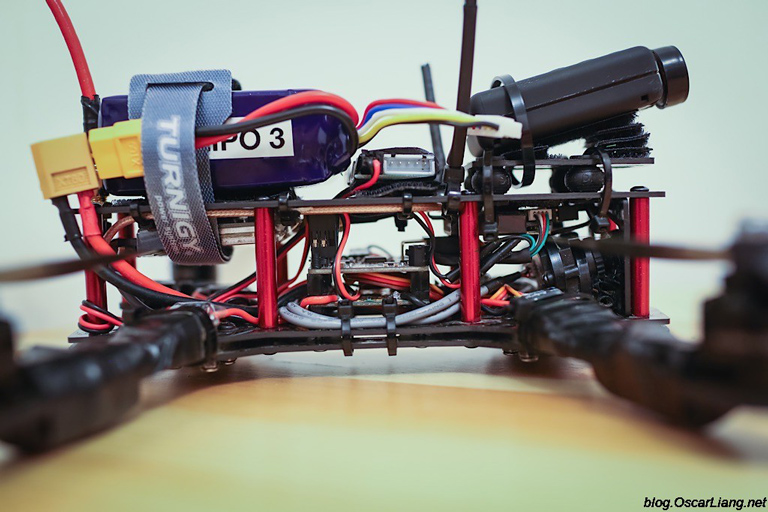
Надо сразу понимать, что внутреннее расстояние между стойками 25-27 мм и батарея влезет туда только боком. Если такой вариант вас не устраивает, можно просверлить новые отверстия для стоек и сместить к краям. Подробнее об этом рассказано в этом видео. Впрочем, можно отверстия не сверлить, а использовать те, которыми крепятся лучи. В этом случае сверху рамы придётся ставить не штатную, более узкую пластину, а такую же, как и в середине (в моём случае она как раз свободна), а заднюю пару стоек не ставить вообще. Пример на фото ниже:

Теперь необходимо забиндить приёмник и настроить на нём failsafe. На самом деле вся первичная настройка ПК производилась на этом этапе, так как иначе до USB на плате было не добраться. Если всё это сделано, можно произвести заключительную сборку рамы. Нижнюю половину (PDB с лучами и проставкой) я скрутил с верхней (средняя пластина рамы с приёмником, соединённая через 4 алюминиевые стойки с верхней) болтами. На каждый луч пошло по три болта M3 x 20мм и одному M3 x 35мм, на которых я также закрепил шасси. Кстати, многие пилоты вообще не ставят шасси. Мне же кажется, что без них квадрокоптер имеет несколько незавершённый вид, так что я их поставил.
Осталось поставить 4 последние алюминиевые стойки. Для этого я сверху использовал болты M3 x 20мм, а снизу M3 x 35мм, так как они идут насквозь через всю нижнюю часть рамы. Как и две предыдущие, эти стойки я заранее заплавил в 5мм-термоусадку.
Квадрокоптер практически готов, осталось несколько мелочей. “Пищалку” для батареи я закрепил на самой верхней пластине, но это временная мера. Позднее, при установке FPV-оборудования, я её переставлю.
Как я писал выше, батарея у меня будет располагаться внутри рамы, что должно защитить её при авариях. У такого расположения есть лишь один серьёзный недостаток: при фронтальном столкновении, батарея по инерции уходит вперёд, сметая и ломая всё на своём пути (в первую очередь полётную камеру). Самый простой способ защиты от этого, который пришёл мне в голову - капроновый ремешок (такие часто используют на рюкзаках), пришитый к стойкам рамы. Он совсем не растягивается, вдобавок, зная заранее размер своих батарей, можно оптимально отрегулировать длину этого ремешка. Честно говоря, не знаю насколько действенным окажется этот способ, хочется испытать его как можно позже.
Вероятно, вы обратили внимание, что “фары” остались неиспользованными. Я долго думал, как и где их крепить, учитывая, что они сильно греются. В итоге оптимальным вариантом было крепление их рядом с курсовой камерой, так что к ним я вернусь в следующей статье, где поделюсь опытом выбора и установки FPV-оборудования.
Последнее, что осталось - закрепить пропеллеры. Тут тоже есть нюанс. В комплекте с моторами DYS 1806 идут красивые и удобные гаечки-конусы. К сожалению, резьба на всех адаптерах в одну сторону, а это значит, что две гайки у нас будут самозатягивающимися, а две - наоборот будут постоянно стремиться открутиться. Поэтому разумнее вообще отказаться от штатных гаек и использовать обычные гайки M5 с нейлоновым уплотнителем, предотвращающим откручивание. Кстати, гаек этих лучше купить с запасом, так как пропеллеры будут ломаться часто, откручивать гайки тоже придётся часто и уплотнители будут стираться. Также важно не перетянуть гайку, так как она металлическая, а сам адаптер алюминиевый, а значит ощутимо мягче.</p>
<p>Чтобы не перепутать какой пропеллер куда ставится, есть простой способ: если смотреть на квадрокоптер сбоку (любого), ближайшие к вам лопасти должны быть скошены к центру. Ну и вдобавок надо помнить, что одинаковые пропеллеры ставятся по диагонали.
Полная версия статьи со всеми фотками находиться тут, а фотоальбом отдельно - здесь.
Угробив свой Blade 350QX и так и не добившись от него повторной взаимности, я впал в долгое размышления, куда двигаться дальше. Сначала было желание собрать квадрик или гексу размером 450 или больше на Naza-M и продолжить летать с подвесом, но теперь уже по FPV. А потом как-то достаточно неожиданно для себя я прикинул, а почему бы не пойти в сторону 250-х гоночных квадрокоптеров опять же с FPV?
Собирать самому или купить готовый?
Первоначально я присматривался к уже готовым моделям. Больше всех понравилась Walkera Runner 250 (обзор от Игоря Рубина). Но почти все готовые модели обладали огромным минусом: плата с полётным контроллером по совместительству была деталью рамы. То есть, если она ломалась при падении (а квадрокоптеры такого класса падают едва ли не чаще всех остальных), то ремонт обходился неоправданно дорого. Да и вообще, общение с Блэйдом научило меня, что проприетарные детали - зло и трата денег. А в случае с Валкерой были ещё и негативные отзывы на форумах (например, это и это).
Короче, как ни верти, надо было собирать квадрик самому и я начал искать информацию. Оказалось, что статей и обучающих видео много. Правда, многие статьи больше похожи на фото-отчёты с минимумом текста. Из видео в первую очередь попались ролики от Юлиана Гиневского о трёх частях: первая часть, вторая часть и третья, она же заключительная. Ролики очень подробные, тем они и нравятся новичкам вроде меня. На форумах иногда обсуждаются эти уроки и не все из числа умудрённых опытом с ними согласны, но в целом резюмированные высказывания выглядят примерно так: “подбор деталей сейчас уже устаревший, детали выбирались подешевле, получился добротный народный квадрик”. Я комплектующие брал почти те же самые, но сейчас, потратив немало времени на чтение форумов, кое-что бы переиграл. О комплектующих, рекомендуемых на момент написания статьи можно узнать здесь. И ещё пара полезных ссылок:</p>
- Поисковик деталей для квадрокоптеров. Удобно, что сразу показывает цены в разных магазинах.
- Drone Configurator - калькулятор конфигурации. Очень забавный инструмент, позволяющий выбрать комплектующие, а потом на их основе отображающий массу, тягу и прочие параметры квадрокоптера. Каталог деталей пока не очень большой, но для каждого товара есть ссылка на магазины, где его можно приобрести.
Подбор комплектующих
На момент, когда все детали были заказаны, а часть уже и получена, появился весьма пользительный FAQ по подбору комплектующих. Там много полезных ссылок, но мало (надеюсь, пока) объяснений “почему именно так, а не иначе”.
Первоначально я заказал детали непосредственно для самого квадрокоптера, а FPV-оборудование решил заказать и установить позднее (об этом будет следующая часть статьи). Итак, мой список комплектующих таков:
- карбоновая рама ZMR250 (искать в других магазинах) и пара запасных лучей (искать в других магазинах) (конкретно эти лучи - вариант сомнительный, так как их парафинят за низкое качество), 29€ + €5
- полётный контроллер OpenPilot CC3D EVO (искать в других магазинах) (чуть подробнее о полётных контроллерах читайте ниже), 15€
- 4 мотора DYS 1806 (искать в других магазинах), 4 * 9€. Они хороши для первого квадрика “на пробу”, но всё же я поспешил. Мощности этих моторов хватает только на пропеллеры 5030, на 5040 они уже будут греться. Намного предпочтительнее использовать моторы размера 2204 (1806 и 2204 - это размеры статора мотора: 18мм x 6мм и 22мм x 4мм соответственно), которые обладают большей мощностью. Рекомендуемый вариант - Cobra 2204 (искать в других магазинах)
- 4 регулятора RCTimer 12A SimonK (искать в других магазинах), 4 * 10€. Для купленных мной моторов они подходят отлично, хотя и большеваты по размерам. А вот для мотора 2204 их силы может быть недостаточно (зависит от пропеллеров), разумнее брать 20А. Вдобавок, новые регуляторы имеют такие функции, как OneShot и активное торможение и имеют более современную прошивку BlHeli вместо SimonK. Также при выборе регулятора надо смотреть, если в названии есть аббривиатура OPTO, значит регулятор не имеет своего BEC’а (регулятора бортового питания) и тогда придётся использовать дополнительный.
- 2 комплекта пропеллеров Gemfan 5x3 (искать в других магазинах), 2 * 2€. Для моторов 1806 это оптимальный размер. Опять же, если используете моторы 2204, можно выбрать пропеллеры 5040. На форумах очень хвалят эти пропеллеры. Также не следует покупать трёхлопастные и карбоновые пропеллеры. Первые делают квадрокоптер маневреннее, но очень сложно балансируются. Со вторыми всё ещё сложнее. Во-первых, они достаточно дороги, а учитывая, что пропеллер в 250-м классе - расходник, в итоге полёты выйдут очень накладными. Во-вторых, что важнее, они весьма прочные и при аварии, вместо того, чтобы погасить удар, передадут его дальше. Результатом будет погнутый вал мотора или сломанная рама.
- плата распределения питания Diatone ZMR250 PDB (искать в других магазинах), 6€
- 3S батарея Turnigy nano-tech 1300mAh 3S 45~90C с разъёмом XT60 (искать в других магазинах), 16€ (вместе с доставкой). Вообще, такой объём пойдёт только для достаточно спокойных полётов. При более агрессивном пилотаже - 1500-1800. На форумах рекомендуют синие Turnigy и синие или желтые Zippy.
- “пищалка” для батареи, 2€
- разъём XT60 с проводом (искать в других магазинах), 2€
- 2 “фары” (это своего рода дань Walkera Runner 250, передние фары которой мне очень понравились и захотелось сделать нечто похожее), 2 * 3€
- приёмник FrSky D4R-II (искать в других магазинах), 22€ (вместе с доставкой)
- шасси, 4€
Из мелочей понадобилось следующее: пластиковые болтики/проставочки (искать в других магазинах), металлические болтики и гаечки (гайки M5 с нейлоновым уплотнителем и болты M2 x 6мм, M3 x 15мм, M3 x 20мм и M3 x 35мм) и термоусадочные трубки разных диаметров, стяжки для проводов и двухсторонний скотч. Также в обязательном порядке необходимы “синий” Loctite (средней фиксации) и диэлектрелизующий лак Plastik 70.
На самом деле, деталей было куплено больше, но многие не пригодились, так как идеи компановки несколько раз менялись до начала и непосредственно в процессе сборки. В частности, уже после заказа львиной доли комплектующих, подумалось, что использование 3D-печати сильно мне поможет. Таким образом я заказал у 3D-печатников следующие детали:
- проставку для нижней части рамы с местом под разъём XT60 (конкретно детали из файлов Unibody_CC3D.stl и Unibody_CC3D_XT60.stl)
- 4 защитных кожуха для моторов (предотвращают попадание грязи внутрь мотора, правда, конкретно эти кожухи чуть великоваты, так как расчитаны на 2204 моторы)
На момент подготовки статьи, на Banggood’е появились в продаже распечатанные проставки, так что если у вас нет доступа к 3D-принтеру, не всё потеряно.
Подобъём финансы: 178€ за комплектующие (цены округлял до целых в большую сторону) + 35€ за 3D-печать. Мелочи не из списка и расходники не учитываю.
Naze32 или CC3D?
Перед тем как приступить к сборке, как и обещал, немного о полётных контроллерах. Наиболее популярными и массовыми для 250-х квадрокоптеров являются CC3D и Naze32. Вкратце, вот чем они отличаются:
- проект OpenPilot (ПО для CC3D) фактически закрыт, а команда разделилась на два отдельных проекта: Tau Labs занимается новыми OpenPilot Revolution, LibrePilot - более старыми CC3D
- поддержка CC3D прекращена
- проект Cleanflight (ПО для Naze32) активно развивается и имеет бОльшую аудиторию, следовательно, легче найти настройки под похожий конфиг коптера
- CC3D можно перепрошить на Cleanflight, но места на чипе впритык и новые версии (1.10 бета) туда просто не влезают. Сам я по пока не планирую этого делать, но вот пара видео-уроков по установке и настройке
- в Naze32 есть контроль заряда батареи и “пищалка”
- у Naze32 есть бародатчик для удержания высоты, но, насколько я понял, на 250-х квадрокоптерах его использование сомнительно
- Naze32 хорошо работает с телеметрией (например, для Taranis вообще не нужно никаких дополнительных датчиков). С CC3D, если хочется видеть не только время полёта и заряд батареи, нужно искать кастомную прошивку для OSD, которая не факт что дальше вообще будет поддерживаться
- CC3D не может работать одновременно с OneShot и PWM приемниками. Это кажется нелогичным, так как регуляторы и приёмник никак не связаны между собой. Всё дело в процессоре CC3D, где недостаточно таймеров чтобы обрабатывать столько каналов приёмника и одновременно с этим управлять регуляторами с большой частотой
Здесь можно почитать подробнее о различиях между Naze32 и CC3D, но и так видно, что Naze32 предпочтительнее. Так почему же я выбрал CC3D? Из-за цены. Оригинальная Naze32 в самой “бедной” версии (минимальное количество датчиков) в 2 раза дороже CC3D, а с “полным фаршем” - под 50€. Есть дешёвый клон под названием Flip32, но в его адрес много нареканий на форумах. В первую очередь жалуются на то, что USB-разъём для прошивки отваливается от платы. Поэтому для себя я решил: появится более доступная версия Naze32 или лишние деньги - куплю, а пока буду летать на CC3D.
Квадрокоптер я купил в первую очередь я купил для съёмки, а тут без подвеса никак. По соотношению цена/качество свой выбор я остановил на подвесе Tarot T2D. Наже поделюсь опытом своих изысканий. Пока только теория.
Для чего нужен подвес, объяснять не надо. Попробуйте хоть один раз поснимать видео с борта без подвеса и всё сразу станет ясно. А вот зачем регулировать угол наклона камеры (tilt) с пульта, если можно сделать это на компьютере? Сам я наиболее отчётливо это понял, когда был в отпуске с квадрокоптером, но без компьютера. Хотелось поснимать и панораму, и чтобы камера была вертикально вниз, и попробовать снимать пролёты. Ан нет…
Теория
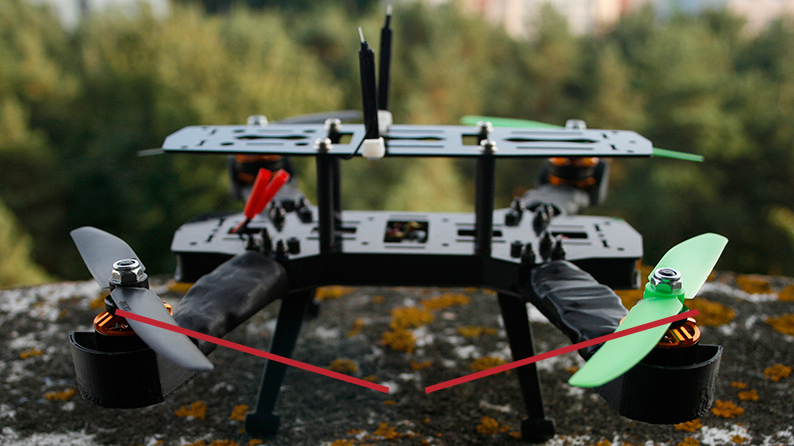
Прежде всего стоит сказать, что место, куда производитель установил антивибрационную площадку (туда же, кстати, ставится и их родной подвес), нельзя считать идеальным: оно слишком сильно смещено вперёд. Вероятно, это сделано для того, чтобы свести к минимуму возможность попадания в кадр моторов и пропеллеров, но при этом страдает общая развесовка летательного аппарата (даже с учётом того, что сзади находится тяжёлая батарея). Следствием последнего является усиленная нагрузка на два передних мотора, их повышенная скорость вращения и, вполне возможно, увеличение вибраций. Устанавливая подвес, имейте это виду. В идеале можно найти центры тяжести квадрокоптера и подвеса и установить одно точно под другим.
Второй момент заключается в том, что Blade 350 QX, вроде как, изначально планировался как “к-подвесу-готовый”, но что-то не срослось. В итоге, на его плате (слева от батареи, если смотреть сзади) есть разъём, к которому можно подключить подвес без платы и он будет работать, но не очень точно. Ну и разумеется, никаких настроек не будет. Тут и тут видео, снятые при таком подключении подвеса. Результат не впечатляет.
Теперь перейдём к регулировке наклона камеры с пульта. Есть два способа реализации этой возможности. Первый способ достаточно прост: вы подключаете к подвесу отдельный приёмник и управляете подвесом со второго пульта. Объяснение на английском есть здесь. Главным минусом тут является то, что в одиночку уже не управиться и нужен отдельный человек для управления камерой. С другой стороны, такой вариант проще и позволяет реализовать управление 3-осевым подвесом. По идее, можно использовать очень дешёвые азиатские приёмник и передатчик. Доверия к ним меньше, но в случае отказа вы только потеряете управление подвесом, а не всем квадрокоптером.
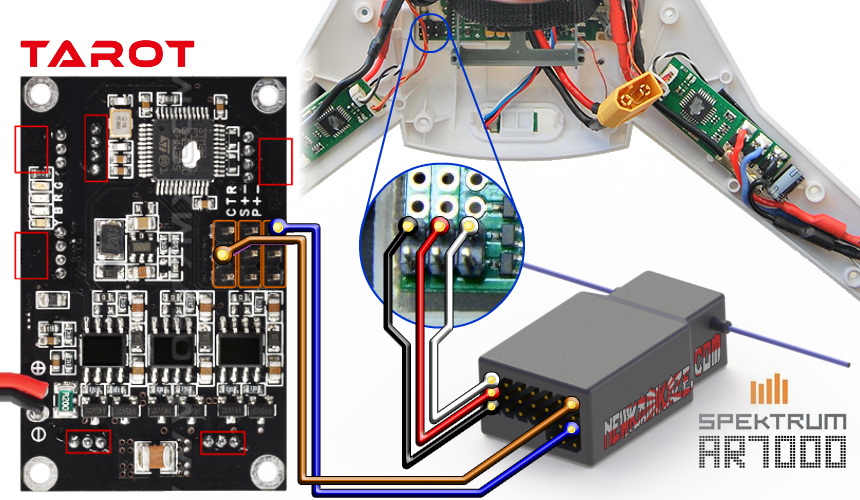
Второй вариант позволяет сделать всё на одном пульте, но он сложнее. Суть его в том, что к подвесу опять же подключается отдельный приёмник, но биндится он к передатчику параллельно с квадрокоптером. Да, два приёмника на одном передатчике. Невозможно? Описание в оригинале и от автора тут, а здесь и здесь два видео от него же. Перво-наперво нужен старый, уже снятый с производства приёмник Spektrum AR7000. Возможно подойдёт ещё какой-нибудь, но он обязательно должен иметь резолюцию 1024 и не менее 7 каналов (потому что 6 каналов уже заняты управлением квадрокоптером). Универсальные 1024/2048 приёмники вроде OrangeRx не подойдут, так как они автоматически переключают резолюцию на 2048. На этом видео товарищ использует приёмник OrangeRx, но я не понял, какой именно. Кроме того, нужен передатчик не ниже Spektrum DX7s, то есть с количеством каналов от семи и выше.
Ещё один нюанс: можно использовать приёмник и/или передатчик с 6 каналами. В этом случае подвес подключается к каналу Aux1. Этот канал используется самим квадрокоптером для функции возврата домой (Return to Home). Тут следует знать, что функция активизируется только на 85%, следовательно, можно использовать весь диапазон до этого. Такой вариант демонстрируется тут.
Практика
Итак, я приобрёл подвес Tarot T2D, б/у приёмник Spektrum AR7000, более высокое шасси для квадрокоптера и комплект (10шт) удлинителей балансировочного провода 3-баночных LiPo-батарей. Подвес пришёл в сборе, но я всё равно раскрутил все болты и посадил на Локтайт (на китайца надейся, а сам не плошай). Кстати, качество сборки оказалось хорошим.
Ещё один важный для меня момент: я хотел установить подвес так, чтобы его всегда легко и быстро можно было бы снять. Лучше всего для этого подходят крепежи action-камер или велосипедных спидометров. У меня уже был опыт общения с китайскими крепежами для камер, пластик которых становится очень ломким при температуре ниже 5-7 градусов, поэтому я взял оригинальный крепёж от GoPro. Закрепил я его примерно по центру квадрокоптера через фанерные пластины: одна с внутренней стороны корпуса, одна с внешней и на ней уже крепление от камеры. Наружной фанеркой я нивелировал небольшой угол наклона (относительно горизонта) “брюха” квадрокоптера. Приёмник Spektrum AR7000 я спрятал внутри корпуса квадрокоптера и он всегда подключен и работает, даже если подвес “отстёгнут”.
Все провода я тоже решил объединить в один шлейф, который тоже легко было бы отключить. Здесь-то и пригодились балансировочные удлинители, состоящие из четырёх проводов: два для питания подвеса и два (а не три!) для управления, которые пойдут в разъём Aux2 приёмника. На схеме ниже видно, куда конкретно подключаются последние два провода на плате Tarot.
Я сразу отказался от установки дополнительного аккумулятора для питания подвеса. Каждый грамм на счету и возить с собой батарею, которая не расходуется полностью к концу полёта, неоправдано. К счастью 3S батарея самого Blade для подвеса - самое то. Чтобы не лезть в проводку самого квадрика, я запитался через балансировочный разъём: берутся 2 провода по краям, красный - “плюс” и чёрный - “минус”. Чуть сложнее оказалось с питанием приёмника, так как для него напряжение штатной батареи Blade 350 QX слишком высокое. Решение нашлось в виде неиспользуемого разъёма “для сервы” на главной плате квадрика, о котором я упомянал выше. Опять же на схеме показано, как это реализовано.
Таким образом, у меня получилась блочная конструкция, которая даёт дополнительные возможности. Например, можно сделать рукоятку с батареей и крепежом от GoPro и использовать подвес отдельно в качестве стедикама. Так же можно сделать FPV-комплект (камера + передатчик видеосигнала) и закреплять его на квадрокоптер без подвеса. Подвес для FPV совершенно не нужен, только лишний вес и более быстрый разряд батареи.
Bind (привязка)
Совершенно ничего мудрёного, надо только заранее переключить передатчик в режим DSM2, иначе 2 приёмника не забиндить. Ставим bind-перемычку в Spektrum AR7000, включаем квадрокоптер и биндим его как обычно. Собственно, вот и вся наука! Теперь летаем, снимаем и наслаждаемся.
Читать полностью: www.newkamikaze.com/articles/67

Как у многих начинающих пилотов микро-квадрокоптера Hubsan X4, у меня возникали различные вопросы. В большинстве случаев ответы на них можно найти на форумах, но это требует времени. Дабы сэкономить последнее, ниже я собал максимум полезной информации по Hubsan X4 H107L/H107C/H107D.
ДИСКЛЕЙМЕР
Во многих аспектах данная статья выражает субьективное мнение автора.
Спорить с ним бесполезно, он упёртый.
Версии Hubsan X4
Есть несколько версий квадрокоптера, давайте пробежимся по ним подробнее.
- Hubsan X4 H107 - самая первая версия. Отсутствует подсветка и мягкие подушечки под моторами, а на пульте длинная палочка-антенна. Сейчас уже нет в продаже.
- Hubsan X4 H107L - улучшенная модель, за что её поначалу называли <b>Hubsan X4 H107 v2</b>. Изменений достаточно много: подсветка, резиновые демпферы для смягчения посадки, режим antiflip и увеличенная дальность связи с пультом (по официальной информации с 30 до 100 метров). Цена на около $46-48 (здесь и далее цены брались на момент написания статьи, могут варьироваться).
- Hubsan X4 H107C - то же, что и предыдущая модель, но с камерой 0,3MP. Камера несколько увеличила вес квадрокоптера, поэтому на данной модели установлены более мощные моторчики (как следствие улучшилось управление) и батарея большей ёмкости. Цена ~$53.
- Hubsan X4 H107C с камерой 2MP. То же самое, что и предыдущая модель, но с камерой более высокого разрешения. Цена ~$74.
- Hubsan X4 H107D - модель с возможностью FPV-полёта. То есть, камера в реальном времени транслирует сигнал на экран пульта и вы летаете с видом от первого лица (отсюда и FPV - first person view). Цена дюже высокая - $150-160 из которых отдельно пульт стоит около $110.
Инструкция
Здесь можно скачать инструкцию к Hubsan X4 H107L/H107C на русском (pdf): www.newkamikaze.com/articles/65#part2
Полезные улучшения
Есть несколько вещей, которые стоит сделать после покупки квадрика, чтобы облегчить жизнь себе и ему.
- Обработать плату диэлектрическим лаком Plastik 70. Hubsan чертовски живуч, но встречал на форумах сообщения, как дома он падал в какую-нибудь миску с водой или аквариум и “умирал”. Лак - не панацея, но весьма разумная мера предосторожности.
- Отбалансировать пропеллеры. У Hubsan`а они слишком маленькие и станок для балансировки тут не поможет. Пропеллер надо одевать на вертикально установленную толстую иголку, крутить и смотреть, какая лопасть будет проседать. Разумеется, такая балансировка особой точностью не отличается, но на пользу точно пойдёт.
- Установите защиту пропеллеров, если будете летать в помещении. Пара столкновений с мебелью - и на пропеллерах появляются зазубрины, ещё пара столкновений - и пропы ломаются. Для полётов по дому, защита - вещь строго необходимая, а вот для улицы лишняя, так как повышает “парусность” квадрика, ухудшает управляемость, а также может цепляться за ветки деревьев. Есть один нюанс: периодически проверяйте то, как она закреплена. От ударов защита начинает понемногу съезжать с моторов и может в конце концов вступить в контакт с пропеллерами. В принципе можно её закрепить (как тут), но это только в том случае, если не планируете снимать её для уличных полётов.
- В инструкции написано, что перед каждым полётом проверять, чтобы верхняя и нижняя половинки корпуса на лучах были защёлкнуты. Если обмотать каждый луч скотчем, то, во-первых, про проверки можно забыть, а во-вторых, это придаст прочности корпусу.

- На каждом аккумуляторе сделайте язычок из скотча, чтобы вытаскивать его из корпуса не за провод, а за этот язычок. Просто и очень удобно.

- По какой-то неведомой прихоти конструкторов, светодиоды возле моторов светят вверх, а не вниз, где находится пилот. Немного исправить положение можно приклеив по кусочку фольги на верхние часть светодиодов. Фольга будет играть роль рефлектора. Ещё можно перевернуть светодиоды, загнув их контакты.

- Потерять квадрокоптер на улице достаточно легко. Наклейка на корпусе с номером телефона владельца даёт хоть небольшой шанс его вернуть.

Пропеллеры
Так как Hubsan X4 не имеет каких-либо проприетарных креплений пропеллеров (как, например, Blade 350 QX), на него можно устанавливать пропеллеры сторонних производителей. Вдобавок, почти все крупные компании, выпускающие РУ-квадрокоптеры, имеют в своём ассортименте модели с размером пропеллера как у Hubsan.
Я пробовал летать на оригинальных пропеллерах и на пропеллерах от Walkera QR Ladybird. По субъективным впечатлениям, на оригинальных пропеллерах квадрик гораздо лучше висит и управляется, но пластик, из которого они изготовлены, мягкий, в результате чего эти пропеллеры часто гнутся (особенно кончики) и могут слетать с мотора. Пропеллеры Walkera (точно такие же выпускает и UDI) ни разу у меня не гнулись и не слетали, но вот управление с ними более “неврастеничное”.

Некоторые энтузиасты склеивают по два пропеллера, превращая их в один четырёхлопастной. Учитывая форму ступицы, делать это лучше с пропеллерами Walkera.

Советы по проведению полётов
- Перед первым полётом (лучше всего дома) откалибруйте гироскоп (как это делается - написано ниже) и настройте триммеры так, чтобы квадрокоптер более-менее висел на одном месте.
- На улице летайте в режиме Expert. Уменьшенные расходы режима Normal не позволят сопротивляться даже среднему ветру и квадрокоптер может унести ветром. Вдобавок флипы доступны только в режиме Expert.
- Во время полёта старайтесь не отрывать взгляда от квадрокоптера, чтобы не спутать где у него нос. Вдобавок на расстоянии свыше 30 метров, вам будет непросто повторно найти его глазами в небе.
- Перед полётом тщательно выбирайте место как самого полёта, так и где будете стоять вы. Исходя из предыдущего пункта, ходить вы сможете только не глядя под ноги, а следовательно лучше не передвигаться вообще. Таким образом, выберайте для себя место так, чтобы при любом стечении обстоятельств, квадрокоптер всегда бы находился в поле вашего зрения.
- Если летаете где-то на выезде, разумно возить с собой 5-10 дополнительных батарей. Надо учитывать, что с разными аккумаляторами квадрокоптер может вести себя немного по-разному и придётся нивелировать это триммерами.
- Всегда берите с собой комплект запасных пропеллеров. У этого квадрокоптера пропеллеры - это расходники. Они теряются и ломаются, так что менять их приходится часто.
- Имеет смысл летать по таймеру на телефоне. В ясную погоду и на расстоянии светодиоды Hubsan`а плохо различимы, следовательно не факт, что вы увидите, когда они начнуть мигать, сигнализируя о разряде батареи. Вдобавок, на высоте больше воздушных потоков, чем у земли и, справляясь с ними, квадрокоптер тратит больше энергии, чем на обычное висение. В итоге, летая не по таймеру, можно разрядить батарею высоко в небе и квадрик камнем упадёт вниз. Выставляйте таймер так, чтобы всего был некий запас. Например, для аккумаляторов на 500mAh рекомендуемое время около 3 минут.
- Если взлетаете очень высоко, то делайте это над такой поверхностью, упав на которую, квадрокоптер получил бы минимальные повреждения. Например, над лужайкой.
- Полёты при порывистом ветре опасны, так как квадрокоптер легко может унести. Если это уже начало происходить и вы понимаете, что вернуть его назад вряд ли получится, возможно имеет смысл уронить его. Так хоть запчасти останутся.
Полезная информация и настройки пульта
Ниже приведены несколько вещей, которые надо знать про квадрокоптер. Все манипуляции с пультом описаны для Mode2.
-
Hubsan X4 H107C пишет видео в буффер, так что для нормального завершения ролика надо обязательно выключить камеру, нажав на ту же кнопку, которая начинает запись. Если вы отключили батарею, не выключив запись, видео либо вообще не сохранится, либо сохранится небольшая его часть.
-
При выборе карты памяти для Hubsan X4 H107C учитывайте, что 1 минута видео с 2MP камеры занимает около 110-120Мб. Класс карточки желательно не ниже 10, иначе могут быть “дёргания” на видео.
-
Флипы (кульбиты) делаются так: сначала нужно дернуть стик в направлении, противоположном направлению флипа, а затем перевести его в нужном направлении на максимум. Флипы доступны только в режиме Expert.
-
Нажатие на левый стик включает блокировку флипов (antiflip).
-
Отключить светодиоды можно продолжительным нажатием на нижний триммер левого стика.
-
Калибровка акселерометра делается так:
- перед началом калибровки выставите все триммера в ноль
- переведите и удерживайте левый стик в нижнем правом положении
- правым стиком совершайте движения из крайнего левого положения в крайнее правое и назад до тех пор, пока на квадрокоптере не мигнут светодиоды
- калибровка завершена
-
Сброс пульта до заводских настроек:
- выключите пульт
- переведите оба стика в верхнее левое положение и удерживая, включите пульт
- на экране появится логотип и заряд батареи, но светодиод на пульте гореть не будет
- переведите оба стика в центральное положение
- переведите левый стик последовательно влево, вправо, вверх, вниз, задерживаясь на секунду в каждом крайнем положении
- верните левый стик в центральное положение
- повторите то же самое для правого стика
- нажмите и удерживайте любой из триммеров, пока светодиод на пульте не начнёт мигать
- калибровка завершена
Аккумуляторы и их зарядка
Как я уже писал выше, лучше иметь несколько аккумуляторов. В продаже есть батареи на 240mAh, 380mAh и 500mAh. Первые - самые лёгкие и лучше всего подойдут для Hubsan X4 H107L, так как он имеет более слабые моторы. 380mAh идеально подходит для Hubsan X4 H107C и Hubsan X4 H107D. Батареи на 500mAh лучше вообще не использовать, так как они слишком тяжёлые. Квадрокоптер тратит больше энергии при полёте с ними, что сводит на нет их увеличенный объём.
Штатная батарея Hubsan`а имеет встроенную плату, предохраняющую от перезарядки, но не все аккумаляторы сторонних производителей могут похвастать тем же. Следовательно лучше не заряжать штатной зарядкой “левые” батареи, а купить для них балансировочную зарядку и специальный кабель. В продаже есть 2 вида кабелей и оба маркируются, как балансировочные и оба позволяют заряжать несколько батарей одновременно.
-
Первый вариант выглядит так и на самом деле не является балансировочным:

По сути это обычный разветвитель, который позволяет вместо одной батареи подключить несколько, но, повторюсь, не даёт возможности заряжать их с балансиром. По этой причине такой кабель можно использовать только с батареями, имеющими плату-ограничитель от перезаряда. Если вы не уверены в наличии такой платы - не используйте этот кабель!
Батареи с таким кабелем подключаются параллельно, что позволяет заряжать батареи разного объёма (например, 240mAh и 380mAh), но с одинаковым напряжением и количеством банок (для Hubsan`а все батареи однобаночные). Сила тока, выставляемая на зарядном устройстве рассчитывается так: объём умножается на коэффициент зарядки. Другое дело, что на многих “неоригинальных” батареях вместо коэффициента зарядки указывается максимальный коэффициент разрядки. Следует знать, что в большинстве случаев для Hubsan`овских батарей коэффициент зарядки составляет 1-1.5C. Итого получаем: 0.38А(380мА) * 1C = 0.3A. Это и есть оптимальные параметры. Зарядка идёт в режиме LiPo Charge 1S. -
Второй вариант является полноценным кабелем для балансировочной зарядки. Выглядит он так:

С этим кабелем уже можно заряжать батареи и без платы-ограничителя, но они должны быть одинаковой ёмкости, так как подключаются последовательно. К зарядному устройству подключаются оба разъёма (силовой и балансировочный), выставляется режим LiPo Balance и указывается количество банок равное количеству заряжаемый батарей. То есть если заряжаете 3 батареи - ставите 3S. Сила тока считается, как и в предыдущем случае: 0.38А * 1C = 0.3A.
Спасибо всем тем, чья информация использована в этой статье.
Сегодня расскажу о балансировке пропеллеров. Занятие это важное и совершенно не стоит им пренебрегать. Отбалансированные “пропы” сильно снижают вибрации при полёте, а от этого шум и нагрузка на моторы снижаются (фактически, во время полёта масса всего аппарата со всеми нагрузками “вешается” на 4 мотора) и качество снимаемого с борта видео становится лучше (пропадает “желе”).
Для облегчения балансировки есть специальные станочки. Один из лучших - Du-Bro Tru-Spin. Есть и более дешёвые варианты родом из Китая, по 5-6 евро. Именно такой я и купил. Кстати, перед началом его использования проверьте, не надо ли балансировать его резьбовые зажимы, а также покатайте ось по зеркалу - это покажет искривлена она или нет.

Перед началом балансировки очень рекомендую посмотреть данное видео, оно полностью описывает этот процесс. Ниже я всего лишь перескажу его содержание по-русски.
Так же есть очень хорошая статья, содержащая много теоретической информации по балансировке. Весь процесс можно разделить на 2 этапа: балансировка лопастей и балансировка центральной части (ступицы). В обоих случаях принцип один: выставляем пропеллер на оси, смотрим в какое положение он сам придёт, а затем либо облегчаем ту часть, которая ушла вниз, либо утяжеляем ту, которая оказалась сверху. Так же важно не забыть, что и поверхность, где будет проводиться всё это действо должна быть строго горизонтальной без уклонов.
Балансировка лопастей (она же балансировка “горизонта”). Тут можно либо облегчать лопасть, стачивая её поверхность, либо утяжелять, наклеивая кусочки скотча. Второй вариант видится мне менее привлекательным, так как скотч может отклеиться, а заметите вы это очень не сразу. В любом случае, независимо от того, что именно вы будете делать, делать это надо на нижней стороне пропеллера. Если будете стачивать, то делать это надо равномерно по всей поверхности лопасти. Китайский станочек на данном этапе очень поможет.
Балансировка ступицы (она же балансировка “вертикали”). Здесь станочек вроде как не помощник, так как вертикально в него ни один пропеллер не влезет. Но мы же люди с фантазией и ничто не помешает нам положить его боком на край стола и прижать чем-то тяжёлым, главное, опять же, сохранить строго горизонтальное положение. Учитывая, что ступица испытывает самые большие нагрузки во время полёта, не стоит ослаблять её стачиванием. Значит тут вариант только один - утяжелять. Для этого отлично подойдут клеи типа Super Attack, но только не обычные, а гели. Для утяжеления надо капать клей на более лёгкую часть ступицы и густой клей-гель в данном случае самое то. Если, как вам кажется, вы уже достаточно сильно нагрузили одну из сторон ступицы, а баланса всё равно нет, имеет смысл проверить, возможно пропеллер кривой. Для этого кладёте пропеллер на лист бумаги и обрисовываете его контур. После этого разверните пропеллер на 180 градусов, чтобы лопасти поменялись местами. Если в этом случае контуры на бумаге совпадут в контурами пропеллера - всё в порядке. Если нет - дело плохо. Пластиковый пропеллер можно попробовать нагреть в горячей воде и распрямить, а вот с карбоновым такое не выйдет.
В завершении, не лишним будет поместить пропеллер на оси между двух чашек и провести контроль качества, как в видео выше.
Отдельная благодарность oleg0230 за его материалы, использовавшиеся при написании этой статьи, а так же всем кто дал полезную информацию в комментариях.
Так как радиоуправленец я самый, что ни на есть начинающий, приходится постигать некоторые азы. Сегодня - батареи. Итак, в радиоуправляемых моделях в подавляющем большинстве используются литий-полимерные аккумуляторы (LiPo). Они самые лёгкие, лучше других сохраняют напряжение при разряде, а также не имеют эффекта памяти. Тем не менее, они, пожалуй, и самые сложные в эксплуатации: нельзя перезаряжать, нельзя перегревать, нельзя переразряжать (разряжать ниже определённого порога). Хранение этих батарей - тоже особая процедура.
Зарядки для батарей идут в комплекте почти с каждой машиной/вертолётом/самолётом, даже самым дешёвым, но не везде стоит ими пользоваться. Случается, что они недозаряжают или перезаряжают, а это сильно снижает срок эксплуатации батареи. Купив универсальную зарядку с балансиром, вы окажете услугу себе и своим батареям. Суть её в том, что она контролирует заряд каждой банки аккумулятора отдельно. Обычно такая зарядка сначала быстро заряжает батарею на 90% ёмкости, а потом дозаряжает каждую банку с балансировкой. Также с её помощью можно заряжать несколько батарей одновременно. Теперь всё это кратко, но ёмко:
- Обычный уровень заряда LiPo-батарей - до 4.2 вольта на банку. На практике на несколько милливольт меньше.
- Заряжать аккумулятор LiPo выше, чем на 4.4 вольта на банку запрещено - перегреется и взорвётся.
- Разряжать аккумулятор LiPo ниже, чем на 3 вольта на банку не рекомендуется - может сдохнуть.
- Батареи 3S и больше необходимо заряжать только с подключенным балансировочным проводом! В противном случае весьма возможен перезаряд.
- При помощи специального кабеля на зарядке с балансиром можно заряжать несколько батарей одновременно. Например, две 3S батареи, как одну 6S или четыре 1S (как у Hubsan), как одну 4S. Подробнее об этом можно почитать здесь или посмотреть видео.
- Для хранения LiPo-батареи желательно предварительно зарядить/разрядить её на зарядном устройстве в специальном режиме. Напряжение будет доведено 3.85 вольт на банку, что является оптимальным. Хранить полностью заряженные или пустые батареи не рекомендуется, это снижает их срок службы.
Перейдём к зарядкам. Ассортимент их велик, но одной из наиболее популярных моделей является SkyRC iMax B6. Продаётся она много где и стоит недорого. Единственное, что надо помнить: к зарядке требуется адаптер. Если есть лаптоп, то от него подойдёт, если нет - придётся купить. Китайские подделки? Конечно есть, но тут всё осложняется тем, что и оригинал родом из Китая. Ниже несколько полезных ссылок, касательно именно этой зарядки:
- Подробная статья о зарядке
- Инструкция на русском к iMax B6 (pdf)
- Пошаговая инструкция по зарядке LiPo и NiMN аккумуляторов
- Сравнение оригинальной версии и подделок
- Видео-руководство по зарядке с расчётом тока
Меры предосторожности при зарядке LiPo-батарей крайне важны, так как температура их горения при перезаряде порядка 3000 градусов и обычной водой их не потушить.
- Если есть возможность, заряжайте батареи не в жилом помещении.
- Обязательно купите защитный пакет (LiPo Safe Sack).
- Если заряжаете большие батареи и часто, порошковый огнетушитель в доме лишним не будет.
Берегите свои батареи и они прослужат вам максимально долго.