Activity
Спасибо Алексею Кутыреву (winterskrim) за отличные моторки с регулями. Ничего не скрыл, упаковал отлично.
Подскажите принцип настройки интегральной составляющей PID. C P и D все более чем понятно, процесс их настройки описан уже 100500 раз, а вот I везде почему-то обходят стороной. На что фактически влияет эта величина в поведении квадрика?
Подскажите, реально ли откачать барометр, залитый лаком? Накосячил, когда мазал очередной АПМ (( Первые 3 все делал аккуратно, а в этот раз поторопился.
Сами дырочки открыты, видимо лак пропитался внутрь. Губочка присутствует, но барометр ведет себя неадекватно. В полете прыгает по высоте до 10м, постоянно меняет обороты.
При висении вертикальную скорость показывает от -240 до 300м/мин.
Если кто ищет недорогую камеру с видеовыходом на замену Айлуку- рекомендую Soocoo c20. По сути- железка оригинальной SJCam SJ4000 под брендом Soocoo. С видеовыход, пишет по качеству точно также как SJ, включается быстрее. Камера очень понравилась, за свои 2500)) Аксессуары и крепления теже, что у SJ. Дешевле всего вроде на Гире: www.gearbest.com/action-cameras/pp_265273.html
Видео, к сожалению уже не с Валкиры:
Ютюб довольно сильно пережимает, если кому будет интересно- залью отрывок оригинала.
Спасибо oleg167 за отличный монитор, отправил быстро. Очень доволен!
Спасибо Евгению Батенко Jentosik86. Отправил быстро, все работает.
Не обязательно летать на RX703, я буду плавать, а на 5й канал ни чего не подключу, не пропадать же добру 😃
Вот держу в руках AT9 и DEVO F7. Сразу как заказал AT9 выставил на продажу F7 чуть ниже цены новой AT9.
Походу нее, F7 продавать точно не буду… 😃 Пусть будет, она такая аккуратная, плавная, милая, а главное пережила со мной взлеты и падения!
Не забудьте откалибровать стики на АТ9, делается это очень просто. Еще неплохо бы разобрать аппу и отрегулировать натяжение пружин и прижатие трещетки- управлять будет намного привычнее и приятнее. Изначально стики явно жестковаты. И на этот раз постарайтесь ограничиться взлетами… без падений 😃
Мужики привет всем,давно не бывал на форуме но…В жизни не все так гладко, на местное рождество ограбили маю машину и вынесли все и вальку в том числе и тем не менее я остаюсь в ваших рядах. У меня осталось много запчастей и я собрал гибрид: Дево м. Валькин компас. И все что нашлось пульт дево 7 пришлось докупить вроде и все нормально только коптер летает в лоитере в режиме симпл хотя миссия показывает что нет там симпл. Скажите кто нибудь знает как убрать симпл режим- прошивку менял от 1,0 до 1,5. Настройки и дефолтовские и мои с моей преждней вальки а он как незло в симпле летает. Ну как избавиться подскажите если кто знает.спасибо
В Mission Planner во вкладке Config/Tuning / Extended Tuning проверьте, что на 7 и 8 канале стоит Do Nothing.
В настройках полетных режимов убедитесь, что галочки симплов сняты. Симпл мод должен уйти.
Мне тоже этот вопрос интересен! Так что плюсуюсь с просьбой 😃
Внутри страшненько выглядит, т.к. полноразмерные регули плохо помещаются. Возможно позже закажу afro 20A, а эти пущу на другой хламолет)
Если я ничего не путаю, то вышло очень бюджетно! Приемник тоже не из серии, что стоят в Валкерах?
Приемник от AT9 стоит. Я долго не хотел менять аппу- летал на DEVO7 и считал ее вполне нормальной. Теперь перешел на АТ9 и забыл про проблемы с РУ- дальность радует, ФС тоже работает как нужно.
Очень интересно!!! А сколько по деньгам вышло? Что от Валкеры вообще осталось? Если есть время, можете все подробно рассказать проданную сборку? На какой силовой плате, как скомпановано?
По деньгам вышло около 14 тысяч (без приемника и аппы). От Валкиры осталось только желание собрать нормально летающий 350 квадр в красивом корпусе, но не на Назе.
Скомпановано все это дело пока страшненько- полноразмерные регули сложновато помещаются. Силовую плату вытравил сам под нужные размеры.
Тоже получил эти аккумы. Кто уже придумывал как их расположить и что сделать, поделитесь опытом.
Сборку спаял из зиппиков. Оба загнал в storage, после чего спаял силовые и балансировочные провода.
Немного оффтопика:
Вот такой агрегат собрал на замену Вале.
На борту mini APM, регули SimonK 30A, моторы пародия DJI 2212 920kv, Аккумулятор 3S 4400mAh 25C из двух зиппиков 2200.
По сравнению с Валкирой летает замечательно, не понимаю людей, писавших что не смогли настроить мини АПМ, возможно дело в регуляторах Валкиры.
Квадрик отлично висит даже в ветер 8м/с, весьма шустро летает (скорость в лоитер стоит 10м/с).
Очень понравиля дешевый алюминевый подвес. После настройки не валит горизонт, за секунду полностью приходит в себя если перевернуть квадр.
Вчера распаковал самый дешевый аллюминевый 2D подвес (по акции он мне обошелся в 1600). Подвес пришлось перебирать- затягивать винтики, укладывать провода, стирать флюс с платы, герметить плату гироскопа. На доведение до ума ушло пол дня.
После настройки могу с уверенностью сказать, что подвесы Валкиры (пластик и металл) однако говнецо… Регулировка крутилками не позвляет настроить его идеально.
Новый подвес тяжелый и сделан из нерационально толстой дюрали, но при этом работает великолепно.
Привет всем! Так и не смог приручить АПМ мини про на Вале с движками 2213 980kv от Т-мотор, и регуляторами от хоббивинг на 20а. В стабе все здорово, а вот в жпс и альте, болтает и высоту не держит. Что я только не делал, и пиды менял и автотюн, демпфер ставил, ничего не помогало. Причем на 450 раме этот контроллер очень стабилен.
Решил поставить naza lite, летает как песня, в настройках очень прост, но скушен до нельзя. Три режима полета и все! Ни радиомодема, ни програмируемого полета по точкам, ни переживаний долетит или нет.
Моторы поставили наверное мощнее родных, аккумулятор их по току выдержит?
У меня тоже s500 на АРМ 2.6 летает висит в Loiter как прибитый просто класс поэтому тоже хочу переделать вальку на АРМ.
Как показала практика, проблема вовсе не в мозгах. У меня devo-m пол года великолепно отлетал на раме x500. Со штатным gps точку держал шикарно.
Проблема скорее в слабых моторах, медленных регуляторах и аккумуляторе.
Поправочка: это относится лишь к исправному контроллеру.
Столкнулся с проблемами после установки мини APM: 1. Не хватает мощности сток моторов, 2. Сгорело уже 2 регулятора, происходит это в тот момент, когда подсоеденяешь аккумулятор к разъему (XT60). В итоге решил заказать Ztw spider 30A opto и Sunny Sky 2212 980 kv.(не реклама)
Санни Скай не подойдут в штатное крепление для моторов, может лучше тогда сразу перейти на 450 или 500 раму?
слабовато отлетал, при полетном весе 1380 грамм отлетал 10 минут, осд показало 10.5 вольт ± решил сесть, было 10.8 вольт, но самый прикол что после 10 минут напруга поднялась до 11.4. Даже не знаю как летать, высаживать ниже? До 10 вольт? А потом садить? и самое странное что даже при гпс антенне сзади коптер в стабилайзе тянет вперед. Хотя в лоитере норм.
Перекалибруйте акселерометр и горизонт в МП. Подозреваю, что дело вовсе не в весе.
У меня на Валкире вообще ОСД сразу заработала, разьве что горизонт откликался только после дизарма (параметры SR0 не менял).
С обновлением МП тоже возникла эта проблема- не мог в обычный АПМ залить настройки, они просто сбрасывались.
Помогло обрубание всех рекомендуемых значений пополам- вместо
SR0_EXT_STAT, 2
SR0_EXTRA1, 5
SR0_EXTRA2, 2
SR0_EXTRA3, 3
SR0_POSITION, 2
SR0_RAW_SENS, 2
SR0_RC_CHAN, 5
Залил следующие:
SR0_EXT_STAT, 1
SR0_EXTRA1, 3
SR0_EXTRA2, 1
SR0_EXTRA3, 2
SR0_POSITION, 1
SR0_RAW_SENS, 1
SR0_RC_CHAN, 3
После этого настройки сохранились.
А так уже на днях приходит комплект на 450 раме.
Избавился от Валкиры и собрал квадрик на раме ТБС дискавери с контроллером АПМ 2.8. Квадрик великолепный, отлично висит на месте в сильный ветер, шустро и долго летает.
Но почему-то снова потянуло в сторону 350, чтобы был закрытый белый корпус. В итоге купил корпус фантика 3 и собираюсь вкорячить туда мини АПМ. Внешне будет полная копия.
Наконец-то решил проблему с падающим в полете подвесом G-2D!Косяк оказался в люфте между рамкой и креплением мотора Pitch. После того, как затянул стопорный винтик расколбас подвеса в полете исчез. (видимо он на каком-то этапе раскрутился от вибрации)
Это верно, мгтф хорош. Есть у меня в загашнике чуток, только толстоват он и совсем не гибкий. А в этом то весь прикол…
У меня на подвесе висят 2 провода 24AWG, можно и тоньше использовать- видео не пострадает. Продаются еще серво провода, тоже очень хорошо подойдут, если один отделить.
Ребята! Правильно ли я понимаю, что вот такие аккумуляторы влезут в Валю как родные?
В описании же размер указан:
Аккумулятор Размеры (l X W X h): 102 мм * 34 мм * 42 м
Знатоки, помогите побороть подвес G-2D…
После небольшого краша с 300 метров (да, небольшого, т.к. квадрик сопротивлялся и падал не камнем) подвес глючит в полете.
Пока стоит на земле- все отлично, но стоит полетать минутку- начинает трястись по всем осям, пытаясь себя сломать, через секунд 5 опять выравнивается и сколько-то летает
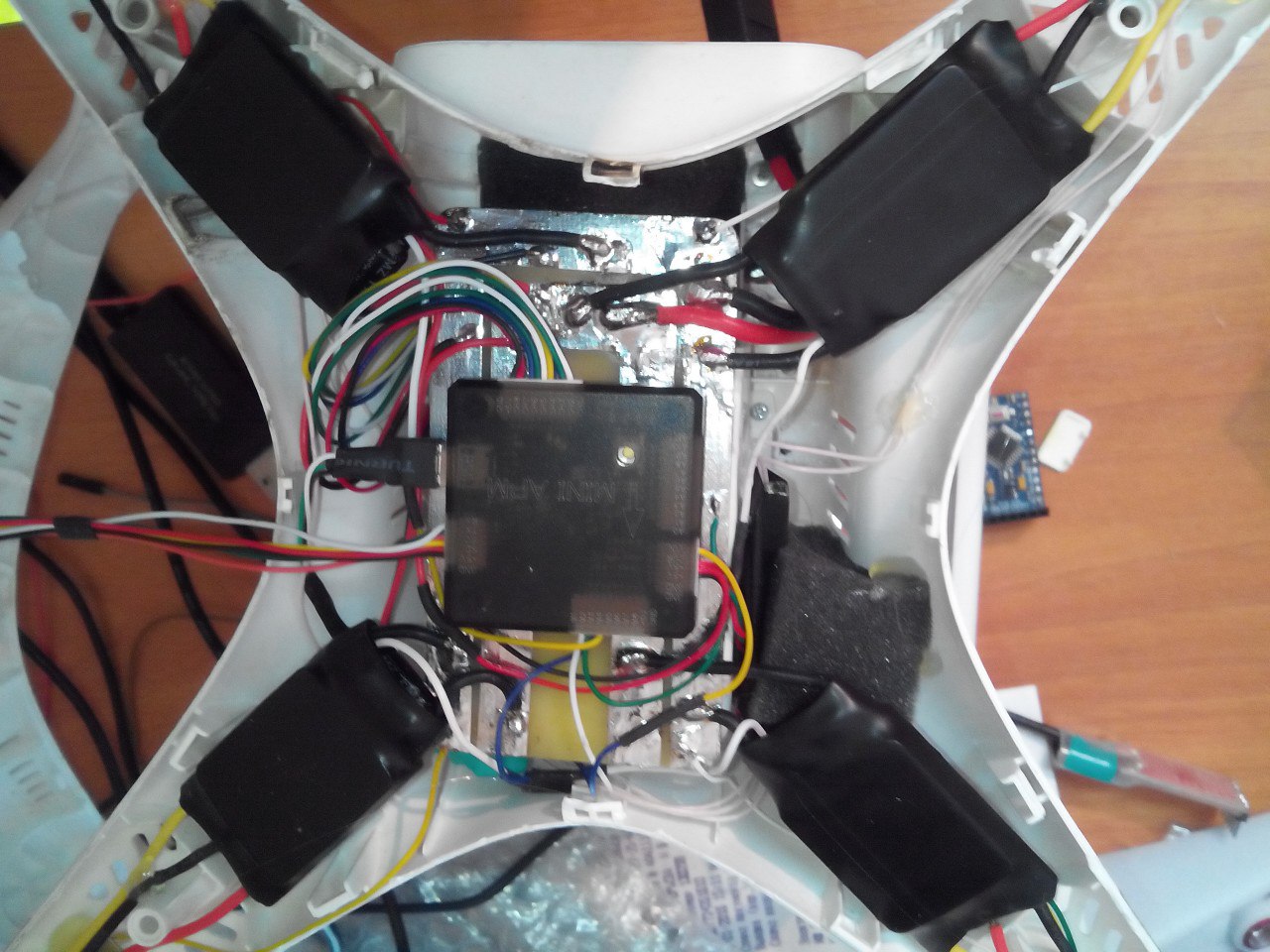
у меня ни каких лишних разъемов нет. сделай фотку
На изображении справа отверстие, за которым 4 контакта на плате.
Заметил, что в контроллере подвеса walkera g-2d сбоку есть отверстие с пяточками под разъем на 4 контакта, но самого разъема нет. Может есть какая-то софтина для подключения его к ПК и более тонкой настройки?
Довелось мне на одном и том же квадрике сравнить сразу три полетных контроллера: DEVO-M, APM 2.8 и NAZA Lite, прошитая в V2.
Когда понял, что Прошка явно не квадрик моей мечты- разобрал ее и мозги перевесил на раму X500 Alien (а-ля китайский TBS Discovery).
На раме с нормальной ВМГ поведение DEVO-M в корне изменилось. Квадрик стал очень уверенно держаться в ветер около 8м/с, амплитура расколбаса от порывов ветра намного уменьшилась. Удержание высоты стабильно ±0.5м, даже при быстром полете низко над землей. Время полета аппарата 18мин до 3.45В на банку. Удержание точки в радиусе полуметра.
Наблюдаемые проблемы:
-Раскачка при спуске 1.2 м/с, при попытке добавить пидов появляются колебания в висении блинчиком, а раскачка пропадает.
-Квадрик колбасит по питчу при полете около 45км/ч, частые и мелкие скачки по высоте (в альтхольде).
-В лоитере очень долго оттормаживается при отпущеных стиках после разгона до 8м/с.
После замены DEVO-M на APM 2.8 поведение стало лучше. Аппарат почти перестало колбасить при быстром полете, скачки по высоте и долгое оттормаживание остались.
Не понравился долгий арм и дизарм (около 2 сек нужно стик держать). Позицию и высоту держит также.
Назу щупал впервые и при первом подлете с трудом понимал, как она управляется. Если кратко- у АПМ четко чувствуешь поведение коптера, стик газа и реакцию на него. В случае же назы по факту пилот практически не управляет квадриком, управление до невозможного казуальное. Все настройки и мануал упрощены до уровня средней домохозяйки.
При этом квадрик летает просто невероятно круто, очень резвый и послушный. В режиме GPS летит на удивление очень быстро, явно быстрее 8м/с на АПМ. При этом аппарат без подвеса летит идеально, без вибраций и колебаний (вибрации заметны лишь в момент поворота по рудеру). Даже в Atti хорошо сопротивляется ветру, квадрик почти не сдувает при 5м/с. По сравнению с АПМ не верояно быстро и ловко спускается. Скорость спуска около 3м/с и при этом практически нет раскачки.
Наблюдаемые проблемы:
-Долго прогревается перед полетом, может стоять минуты 4 и моргать. После смены аккумулятора прогрев занимает около 20 сек.
Собираю, восстанавливаю. С миру по ниточке 😃
На USB плате отлетела деталь единственный полупроводник. На этой плате (судя по другим фото). Вот не могу разобрать какая там была деталь или для чего служит. Хотя плата стоит не дорого, но до меня долго будет идти. Может кто знает, что там за деталька стоит, или маркировка детали на фото каком может видна?
Это всего лишь маленький L фильтр (катушка). Можно замкнуть перемычкой. Через него вроде rx tx идут от ПК.
На экране FLIGHT DATA У меня не когда не чего не показывало (( аккум заряжен все разблокирует режимы переключает по осд показывает режим.по квартире летает а напряжение на монитор пишет 0.00v ((
Проверьте в Full Parameter list пункт VOLTAGE_SENSOR
В том то и дело что левый глаз не тух вообще! Только что откалибровал в мис.пл. (правда в квартире) и все заработало! Может глюк какой то был после того как застрял на ветке дерева но падения не было )) теперь другой глюк не показывает напряжение аккума через осд хотя все настройки прописаны
А в МП что показывает на экране с горизонтом? Если не удается измерить напряжение- будет писать предупреждение Check Board Voltage (0.00v) и не даст армить.
Возможно отключен сенсор напряжения (VOLTAGE_SENSOR должен быть “А12” вроде).
переделанная валя наконец-то полетела.
в контроллере заменил конденсатор, корпус контроллера имел отверстия не на месте и плату согнуло.
итак имеем: от вали контроллер и плату питания, регуляторы и моторы не родные. рама 525 переделанная немного, сделаны ноги для того чтоб можно было б подвес ставить. и моторы прикрутил напрямую к лучам.
в лоутере не летел из-за компаса.
Вот и у меня от Валкиры остались только полетный контроллер и пульт. Контроллером доволен, летает не хуже АПМ.
Получилось что-то вроде TBS Валкивери))
Всем добрый день. Приобрел пищалку на аккумулятор. Кто ставил подскажите какой порог срабатывания по вольтажу лучше ставить? Поставил 3.6в на банку начинает пищать через 5минут, хотя аккумулятор новый, падение напряжения по банкам одинаковое. Хотелось бы чтоб пищала минут за пять до падения коптера. Или попробовать отрегулировать пищалку держа коптер в руках включённым, так сказать методом тыка? И в Миссии Планер какой порог на вольтаж лучше ставить?
На пищалке ставьте 3.5В, в Миссион Планнере 10.5. Фэйлсэйв по батарее отключите (Disabled), чтобы коптер ничего не делал (будет просто моргать один глаз). 10.5 Это когда дрон уже нужно тянуть к себе и сажать.
То, что пищать начинает через 5 минут- возможно аккумулятор перегрелся, он тогда резко напряжение просаживает.
Какую скорость приемика RX1002 лучше использовать, 22ms или 11ms?
сегодня наблюдал интересный глюк.
камера айглюк плюс.
пока подвес в ремонте, прицепил на платформу, чуть ниже лучей (рама ф450)
Короче, видео на пульт ф7 дает, но только газ перескакивает за 50%, отрубаеться видеолинк. Даже в пару шагах…до этого на подвесе летали далеко - связь пропадала метров за 600
Скорее всего что-то в сеть шумит. Моторы и регули, насколько я понял, вы поставили более мощные. Следовательно нужно усилить фильтр по питанию.
Сделайте 2-3 витка проводом питания камеры вокруг ферритового колечка, параллельно питанию камеры поставьте электролитический конденсатор примерно на 500мФ.
Валкеровцы, выручайте! Не могу найти нормальную мастерскую в Москве, чтобы сделали диагностику и определили проблему. Был сегодня у ребят в МГУ, говорят у нас нет запчастей от Вальки, чтобы протестировать и определить методом исключения проблему, вот тоже блин мастера я и сам смогу протестить с запчастями методом исключения. Может, кто есть из фанатов дела и может продиагностировать дома, я отблагодарю. Выручайте братцы.
Если есть время- стучите в личку, разберемся без метода исключения.
Мануала по кастрации Айлука нет, но в теме уже выкладывали фотографии (что резать и куда подключать).
- Лишнее устройство, которое уже реализовано в стоке. Штатная телеметрия, конечно, далеко не айс, но без неё на реальных вылетах совсем плохо.
- OSD встраивается в видео-сигнал, как я понимаю - а у меня iLook+ со встроенным передатчиком - что меня с разных сторон устраивает. Можно, конечно, приколхозить FPV-камеру (имеется в комплекте с передатчиком), но хотелось бы видеть именно сигнал основной камеры - для меня сьёмки важнее полёта. В целом можно попробовать и то и другое реализовать - на двух разных экранах… Думать надо, шансы прикидывать. (с)
Лучше наверное кастрировать iLook и вывести из него видеосигнал на нормальный передатчик 600mW. И дальность увеличится и OSD легко пристроить.
Я Валю думаю на другую раму пересаживать (точнее - она уже, но на временной), так что мучиться не придётся. 😃
GPS-датчик выдаёт у Прошки данные и на Devo-M (для GPS-режимов), и напрямую в приёмник, для передачи телеметрии - там два проводка.
Понял, что вы имеете в виду, у меня телеметрии небыло на RX703A. Нет, порта телеметрии на 1002 не обнаружил 😃 А чем не угодила OSD? Она выводит ту же телеметрию, даже нагляднее.
Я вот тоже подумываю над сменой приёмника - либо брать 1002, либо 1202 - правда, 1202 дороже раза в полтора… Оно как, в стоке входит, или как-то колхозить надо? Не вижу на нём входа GPS.
Вчера опять приложили аппарат об дерево из-за внезапного сумасшествия - на сей раз никак не связанного с GPS-режимами, прямо в альт-холде агрегат вбесился и начал гонять на больших скоростях практически без возможности управления. В итоге посадка на дерево метрах в 10 над землёй - потом ещё час сбивали и стряхивали агрегат на землю. 😃))
Сегодня, похоже выяснилась причина - вспух кондёр внутри контроллера Devo-M. Все подробности - у alibaba.
Брать 12 канальный смысла не вижу, 10 более чем достаточно. Колхозить придется однозначно, в штатное место он не войдет (разъемы сверху).
У меня сейчас от Валкиры остался только полетный контроллер, GPS и аппаратура. По этому проблем с размещением приемника не испытывал- мучайтесь 😃
***Вход GPS на приемнике? Вы о чем вообще?
Data-Bus на RX1002 нет, соединять каждый канал отдельным проводом (еще нужно их докупить).
Получил сегодня Rx1002- крутая вещь! Дальность по земле в легкую взял в два раза дальше RX703A. Фэйлсэйв работает быстро и безотказно, связь восстанавливается тоже быстрее. Возьму еще пару на другие модели 😃
Компас перенесен с ног на ножку вверху - над жпс.
Может лучше наоборот? Чтобы патч GPS смотрел в небо, а компас под ним
после очередного краша вали и разрушения корпуса, решили перенести мозги вальки на другую раму, была свободная 525 рама. все встало, но при арминге не включались моторки. идея была поставить помощней моторы и регули. если запускаться через мишион, то все включалось и работало, но в поле то как, не пойдет. регули были не прошитые на 30 а. сравнив облик и выбрал прошивку, перепрошил - все заработало. мораль - прошивать если не крутятся моторы. в поле еще не были дождь помешал. еще такая мелочь: после краща сломался пополам луч с регулем вместе, но еще есть платка на которой стоит разъем usb, так вот она при ударе согнулась и разогнулась и с нее слетели две деталюшки перемычки-индуктивности, и из-за этого конекта небыло.
Платку эту совсем убрал, сделал USB провод на прямую. Контроллер вроде не жалуется 😃