Activity
Согласования там просто нет, антенны сидят напрямую на выводах ИС.
Учитывая, что прямо сейчас коллега по полю пытается найти в Радиомастеровском пульте, куда тот жрет лишние полампера - я составил мнение о бренде Radiomaster 😃
Похоже. Оба антенных входа звонятся на землю как 20 Ом в обе стороны.
Видимо в fs, перестает отдавать телеметрию.
D8R-II при том же уровне TX :
В пределах квартиры. Уровень rx меняется от 90 вплотную до 0 через пару стен, когда TX еще под 50. Частота сбита ? Они в инструкции требуют Frequency fine tune, которого в DJT ясное дело нет.
Подключаю приемник Radiomaster R81 к старому модулю DJT. Все забиндилось, работает, но вот уровни RSSI : уровень телеметрии с приемника нормальный, как с D8R-II. А вот уровень приема очень низкий (на D8R они примерно одинаковые). Никто не сталкивался ?
Похоже, доступны исходники прошивок мониторов на АМТ630А. Это китайские автомобильные ТВ 4.3", 5", 7" по три рубля ведро.
Ядро там 8051, компилируется Кейлом. Сам вряд ли займусь. Кого интересует - прошу. Внизу страницы форума: forums.nesdev.com/viewtopic.php?f=23&t=16825&start…
И которая где ?

а 2.4 в горизонтальной поляризации?
антенна с двойной поляризацией?
Все на 2.4, на передаче WifiStation Ext с одним трактом и простым диполем, на приеме то, что на фото. Работает, по видимому, только тот тракт, который подсоединен к патчу горизонтально. С точностью до интерфенционной картины в комнате, надо еще в поле проверить.
даже в морозильник - прямо на пельмени
Вполне себе способ разморозки, 800 мВт х 2.45 ГГц 😃))
это происходит и со мной
Похоже, что в firmware linux’овского драйвера где-то ляпнули.
Ну, будет не жалко передалать на Helix, раз родная diversity не работает.
Использую на приеме Ubiquity WifiStation (ту, что с патч-антенной и двумя ВЧ-трактами), софт - OpenHD 2.02. Вижу, что уровень сигнала зависит от поляризации - при горизонтальном расположении передающей антенны на 10 дБ больше, чем при вертикальном, т.е. приемные антенны не переключаются. Это только у меня или у всех ?

А такие штуки видели уже ? Матрица от камеры видеонаблюдения с интерфейсом CSI. Эти штуки реально выдают цветную картинку в темноте.
Не пойму, что это письмо значит…?
Что Вы живете в Российской Федерации. И покупать DJI можете у перечисленных в письме реселлеров, а не на Алиэкспрессе, как самый умный.
этот комплект движков с винтами
Коллеги заказали на пробу - посылку завернула таможня. Я правильно понимаю, что тормозят все, на чем написано DJI, согласно вот этому письму - www.alta.ru/tamdoc/19p01572/ ?
Это как ? Подключаем к обычному ESC, и не крутится ?
Вижу, что нужны пружины на оси -
Господа спарководы, гляжу с большим интересом на этот комплект движков с винтами на предмет применения в самодельном аппарате. Правдоподобны ли ТТХ движков : диаметр 17 мм, высота 14.5 мм, вес 12 г, кВ 2100 ?
И, для крепления винтов на движки в комплекте все необходимое, или нужны еще какие-то детали ?
6x6x1
Есть описание сборки таких рам? Прочность итд?
Нет. Свой проект, и полеты пока только над диваном, в силу причин.
Ну и это не две пластины. Короб, собранный в шип.
Закончен неделю назад. Вес рамы 35, вес собранного без батареи 195.
Параметр MOT_PWM_TYPE установить в 4. Не забыть сохранить и перегрузиться.
Ну так включите в настройках ArduCopter’а DShot, раз он у Вас есть.
Попробую сделать на ардуинке, по результатам отпишусь здесь
у меня на таком принципе и работает,… . нужна Ardoino 32u4
Либо STM32f103 (blue pill). Сделал по вот этой статье, работает.
Вся активность в итоге переехала в группу в WhatsApp, добавиться - ткнуть в chat.whatsapp.com/K3deA8QCd9qJV9L3CQNc3q с мобильника.
Взято с первого же взгляда на картинку и надписи вокруг нее. Похоже, я помогал отлаживать обесточенное устройство.
Судя по картинке, линия питания серв Vx висит в воздухе. Ее надо запитывать от верхней платы или отдельного BEC. Сделано ?
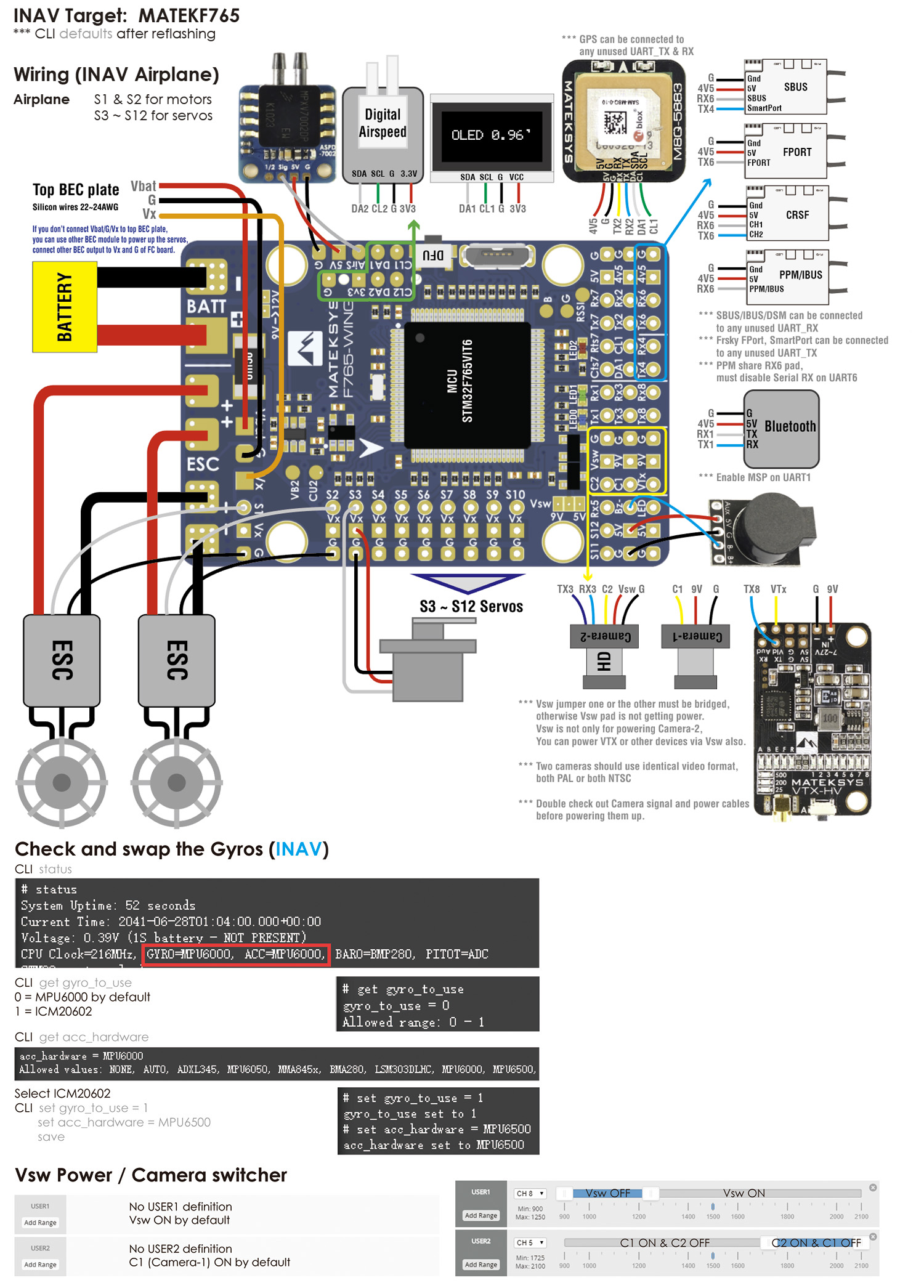
Отсутствие земли на разъемах - что-то совсем странное. Как правило означает, что что-то сожжено. Или цоколевку напутали.
Моторы можно временно переключить в PWM параметром MOT_PWM_TYPE, см. ardupilot.org/copter/docs/parameters.html#mot-pwm-…
Это файл исходного текста. Если Вы исходники прошивки не качали, то на машине его нет.
Вот он - github.com/ArduPilot/ardupilot/blob/…/hwdef.dat
И вот группировка выходов по таймерам. Более грамотная, чем у меня, надо сказать. Логика та же - на выходы с одним номером таймера (TIMx) нельзя назначить разные протоколы. Либо мотор, либо серва.
# Motors
PA0 TIM2_CH1 TIM2 PWM(1) GPIO(50)
PA1 TIM2_CH2 TIM2 PWM(2) GPIO(51)
PA2 TIM5_CH3 TIM5 PWM(3) GPIO(52)
PA3 TIM5_CH4 TIM5 PWM(4) GPIO(53)
PB0 TIM8_CH2N TIM8 PWM(5) GPIO(54)
PB1 TIM8_CH3N TIM8 PWM(6) GPIO(55)
PD12 TIM4_CH1 TIM4 PWM(7) GPIO(56)
PD13 TIM4_CH2 TIM4 PWM(8) GPIO(57)
PD14 TIM4_CH3 TIM4 PWM(9) GPIO(58)
PD15 TIM4_CH4 TIM4 PWM(10) GPIO(59)
PE5 TIM9_CH1 TIM9 PWM(11) GPIO(60) NODMA
PE6 TIM9_CH2 TIM9 PWM(12) GPIO(61) NODMA
PA8 TIM1_CH1 TIM1 PWM(13) GPIO(62) # for WS2812 LED
Вот тут это в явном виде сказано : ardupilot.org/…/common-matekf765-wing.html
Гляньте еще в MP параметр SERVO_RATE, там 50 Гц ?
SERVO_RATE: Servo default output rate
This sets the default output rate in Hz for all outputs.
Типа: хочешь сервы - юзай только ПВМ.
Не так страшно. В пределах одного таймера должен быть один протокол. На моей Omnibus F4 первые шесть выходов на одной паре таймеров, последние два - на третьем. Туда можно ставить независимый протокол :
#pwm output. 1 - 4 on main header, 5 & 6 on separated header w/o 5V supply, 7 & 8 on CH5 and CH6 pads
PB0 TIM1_CH2N TIM1 PWM(1) GPIO(50)
PB1 TIM1_CH3N TIM1 PWM(2) GPIO(51)
PA3 TIM2_CH4 TIM2 PWM(3) GPIO(52)
PA2 TIM2_CH3 TIM2 PWM(4) GPIO(53)
PA1 TIM2_CH2 TIM2 PWM(5) GPIO(54)
PA8 TIM1_CH1 TIM1 PWM(6) GPIO(55)
PC8 TIM8_CH3 TIM8 PWM(7) GPIO(56)
PC9 TIM8_CH4 TIM8 PWM(8) GPIO(59)
Надо смотреть в файле hwdef.dat своей платы : github.com/ArduPilot/ardupilot/tree/…/hwdef
При необходимости можно изменить этот блок и перекомпилировать код.
Кто-нибудь сталкивался с такой проблемой?
Не оно ? rcopen.com/forum/f90/topic547063/8
За много лет общения с микропроцессорными устройствами не приходило в голову оценивать их по дружелюбности. Если так судить - то я Маугли, воспитанный волчьей стаей 😃
В свое время переход на ER9X/OpenTX был глотком воздуха. Мне прекратили связывать руки без причин и на пустом месте, с самым дружелюбным выражением лица. И особенно ярко это проявилось на планере : возможность настраивать свои триммера для каждого полетного режима. Повесил на переключатель три совершенно одинаковых режима и уже в воздухе подкрутил отдельно набор, парение и посадку.
на одном из экранов пульта есть индикация положения переключателей
Кстати да. С любым другим ПО для диагностики потребуется лезть внутрь с тестером. Это к вопросу о дружелюбности.
Менял в обратную сторону, 915 на 433, и шил UltimateLRS. Работает.
В OpenLRSng частота выбирается в исходнике (#define RFMTYPE 915), полезно скомпилировать руками.
Измайловское поле в WhatsApp переехало полностью. Это, я вижу, тоже по дороге.
Сейчас будет плач Ярославны. Неделю макетировал электронику коптера-дальнолета с весом в районе 250 г. На финальной сборке спалил процессор полетного контроллера. Делов-то, пойти да купить новый… м-да.
С ходу стало не понятно почему SDCC, а не банальный gcc?
Любой компайлер под 51-ю архитектуру. Автор пользуется SDCC, make-файлы под него, не стал разбираться, просто поставил.
Да и вообще никакого не надо, прикладываю уже скомпилированные прошивки.
Raspberry - просто чтобы залить прошивку? Если локально есть другие способы, то почему бы и нет?
Опять таки для простоты, 5 проводов. CC2510 прошивается фирменным TI программатором ценой в 5 приемников, народного, как ни странно, нет. Есть решение на Arduino, оно требует тех же питоновских скриптов и у меня не заработало. Pi была под руками, так что сделал на ней.
Цоколевка разъема V8FRII та же, как на V5DM, описана здесь.
Цоколевка XM+:
Внимание, подводный камень. Автор рекомендует подавать 3.3В с Pi на процессор. Я так сделал и спалил стабилизатор на 3.3В на плате приемника. Подавать надо 5В на гребенку.
а если не получится, можно будет старую поставить и где её взять
Обратно никак.
Теперь вспомнить бы еще, как я эту машинерию в ноябре обустраивал 😃. Давайте так, кто реально соберется перепрошивать и не разберется по приведенным в первом посте ссылкам - пишите сюда, повторю у себя последовательность шагов и выложу.
Отлетал несколько месяцев. До 1.5-2 км при патче на передатчике, в грязном московском эфире.
Только что прошил тем же кодом FrSky XM+. Т.е. это способ цеплять новые приемники к старым модулям FrSky XJT.
Наврал про сопротивление в 100 раз. Не 50 мОм, а 0.5 мОм. Мощность на нем равна I*I*R = 45х45х0.5Е-3 = 1 Вт. Мало для отпайки.
Будем смотреть…!
Кстати, полезно с лупой осмотреть внимательно выводы процессора. Я туда пару раз сажал крошечную крошку припоя, которая просто глазами не видна, но закоротить два вывода ее хватает.
Моя плата наверняка другая, но принцип одинаковый.
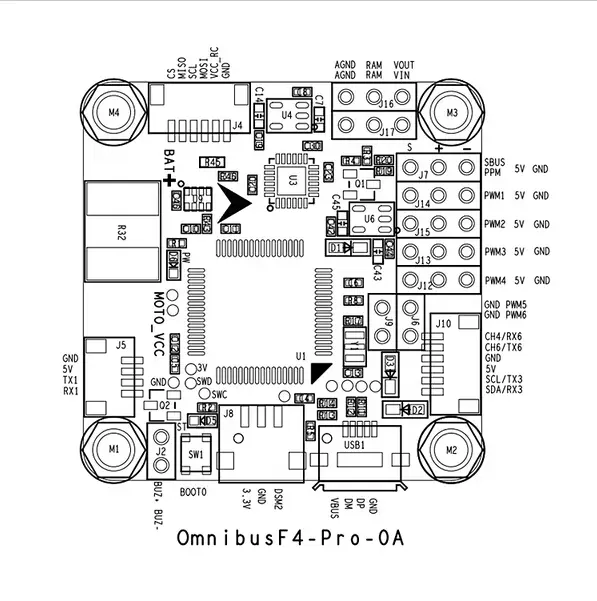
На резистор R32 сверху приходит плюсовой провод от батареи (BAT+), снизу уходит плюсовой на регуляторы (MOTO_VCC). Плата меряет падение на R32 и считает ток. Плюс плата сама питается с нижнего конца резистора, ее ток потребления тоже учитывается.
Если мы его снимем вообще, поставим в разрыв плюсового провода, а с платой соединим двумя проводами - то электрически ничего не изменится, а силовые провода на плату тащить не придется. Но это у меня. Если XT60 запаян на самой плате, как здесь - то смысла в выносе резистора нет.

А у нас Росгвардия поймала Геннадия и сделала внушение. Раньше на поле был один коллега 12 лет, у которого комендантский час с 22, теперь двое 😃
балластное сопротивление, прямо около разъёма ХТ60. На нём была наклейка, Om50
Это 50 мОм (в смысле, 0.05 Ома), его если неаккуратно припаять, амперметр начинает врать. Больше ни на что влиять не должно.
Я свое просто отпаял с платы и поставил в разрыв плюсового провода батареи, а к площадкам платы кинул тонкие провода с обоих его концов.