Activity
если ничего не напутано то можно, два gnd, датчик напряжения, тока, два по +5
там еще не так то просто все спалить по 5 вольтовому питанию.
по питанию 5 вольт стоит защитный стабилитрон и диод с предохранителем.скорее всего высокое напряжение попало куда нить на другие входы, может замкнуди между собой платки юбека и датчиков тока и напруги?
Нет, я их обильно обмотал изолентой и еще 2х сторонний скотч положил между ними.
Кстати, вспомнил вот что:
Как только допаял все 4 контакта на LM2596 и вставил в аккум, чтобы настроить подстрочный резистор на 5v - напряжение прыгало ± несколько вольт пару секунд. Вероятно из-за того, что плата была горячая после пайки (паял обычным паяльником, нету станции). Потом она остыла и он начал выдавать стабильные 5v. Тогда я его и подключил к APM.
Может все таки и было еще пару таких скачков после подключения…
Сам РМ капризный. Он сам может сгореть и потащить за собой остальное. Плата за маленький размер.
Та ладно, обычный же разъем. Что там такого капризного?
надо проверить не только что идет +5 но и что при этом на остальных выходах, на датчике напряжения, тока,
на других подключениях особенно если используется несколько баатрей, например для отдельного питания видеотрактадля справки допустимый диапазон напряжений на входах сенсора тока и напряжения 0-5 вольт измеряется относительно GND
Это да, датчик напряжения и тока я не проверил.
Спасибо.
И все таки, там точно нету никаких подводных камней в самом разъеме PM? Я про два + и два -. Может их нельзя было соединять между собой?
А то аж интересно стало. Но все схемы, которые я нахожу в сети - не настолько мне понятны.
наверное провернул резистор регулировочный когда термоусадку одевал
Та не, проверял перед тем, как втыкнуть - было ровно 5v.
А там точно нету никаких подводных камней в самом разъеме PM? Я про два + и два -. Может их нельзя было соединять между собой?
Я то новый APM 2.8 уже заказал, но еще один также спалить не хочется.
А вы знаете что на линии РМ там диод на арм есть, то есть если питать пятью вольтами через РМ вход АРМ будет получать меньше чем 5В.Из за этого почти все модули идут на 5.3-4В.
Если нормальный модуль то все работает отлично.
Дело же не в диоде. То, что я подал не 5.4, а меньше - не должно было спалить атмегу. Не понимаю как так вышло.
Юху!
Только что спалил свой APM. Греется атмега, комп не видит. Все, приехали.
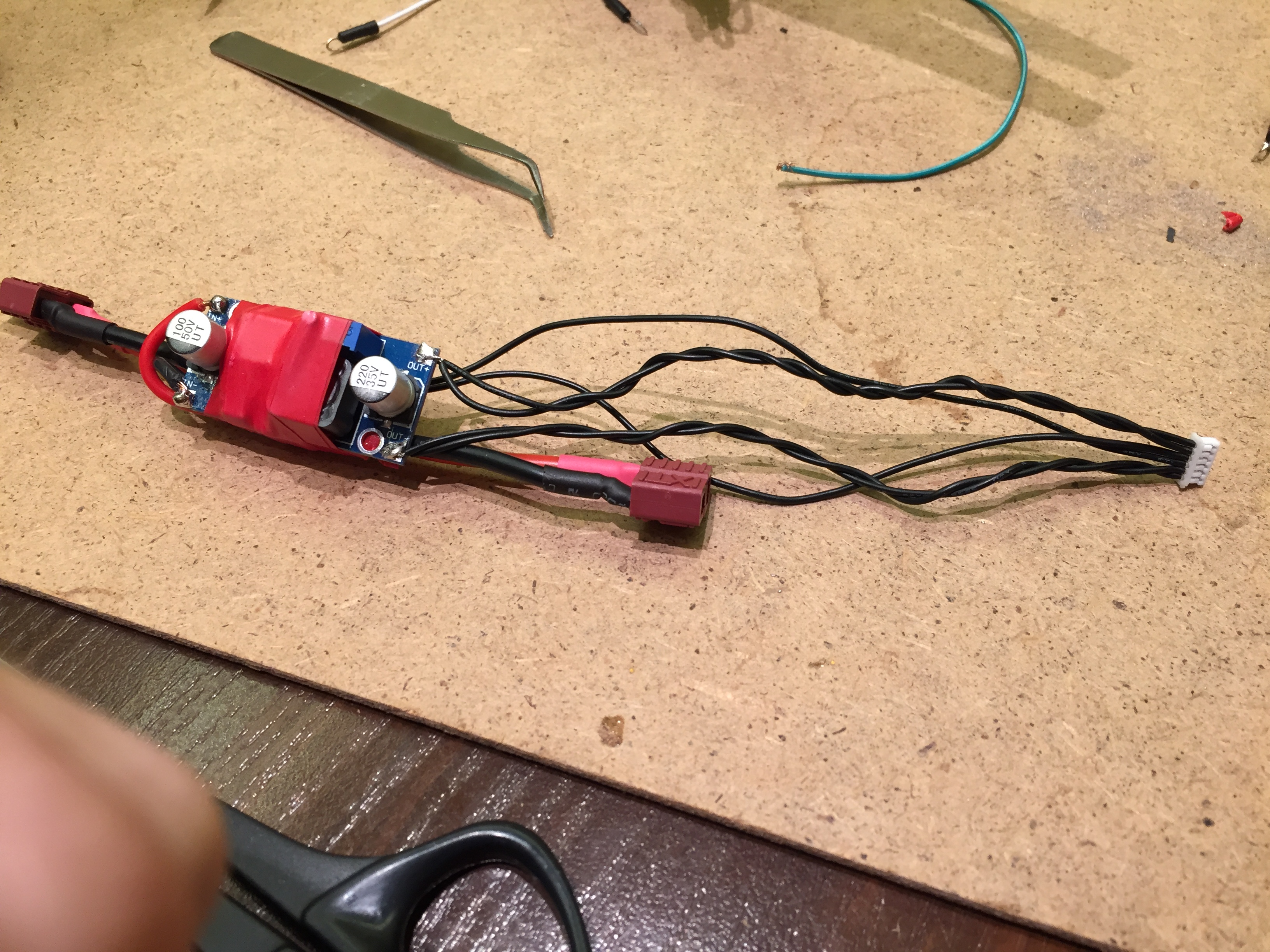
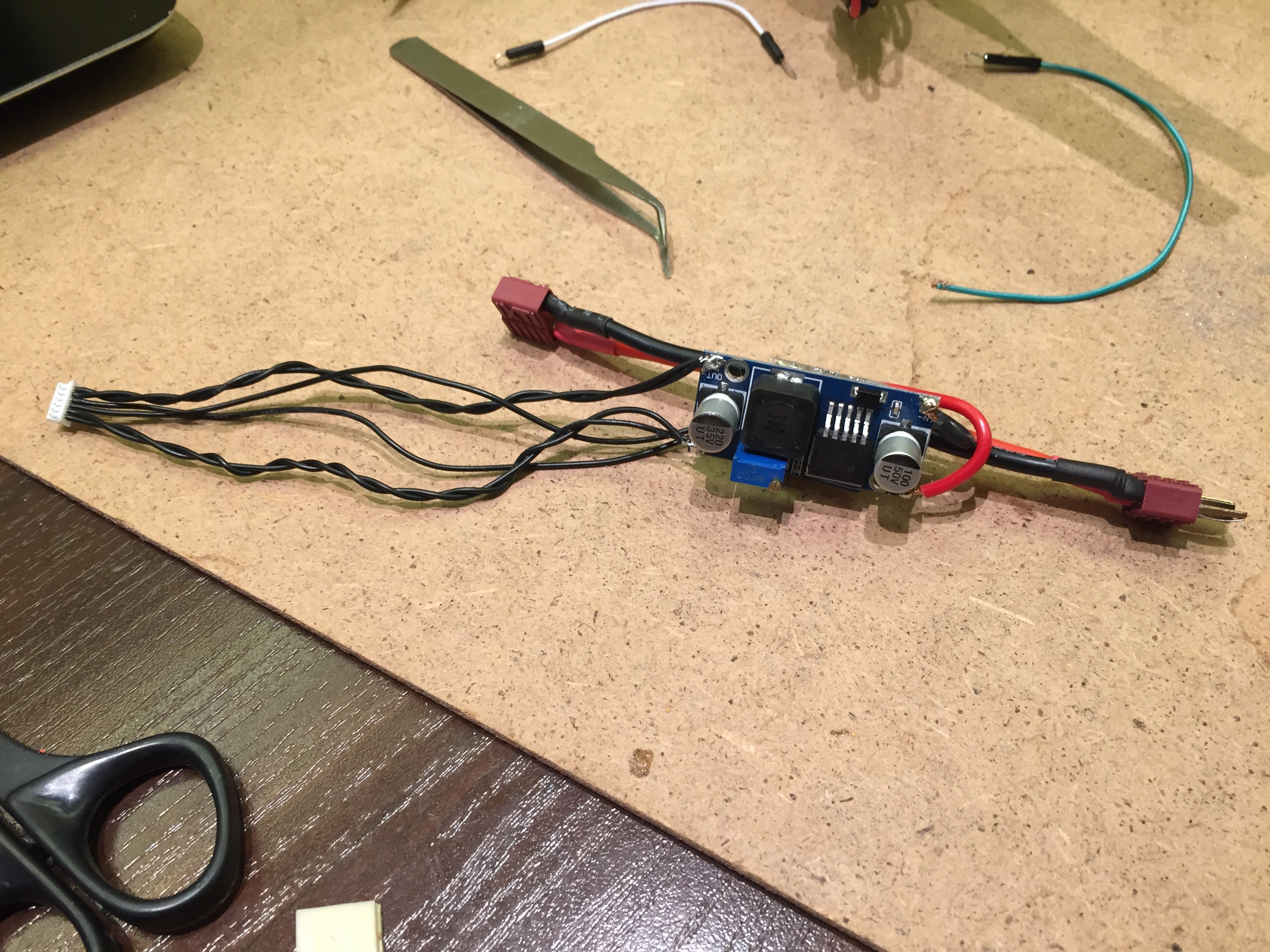
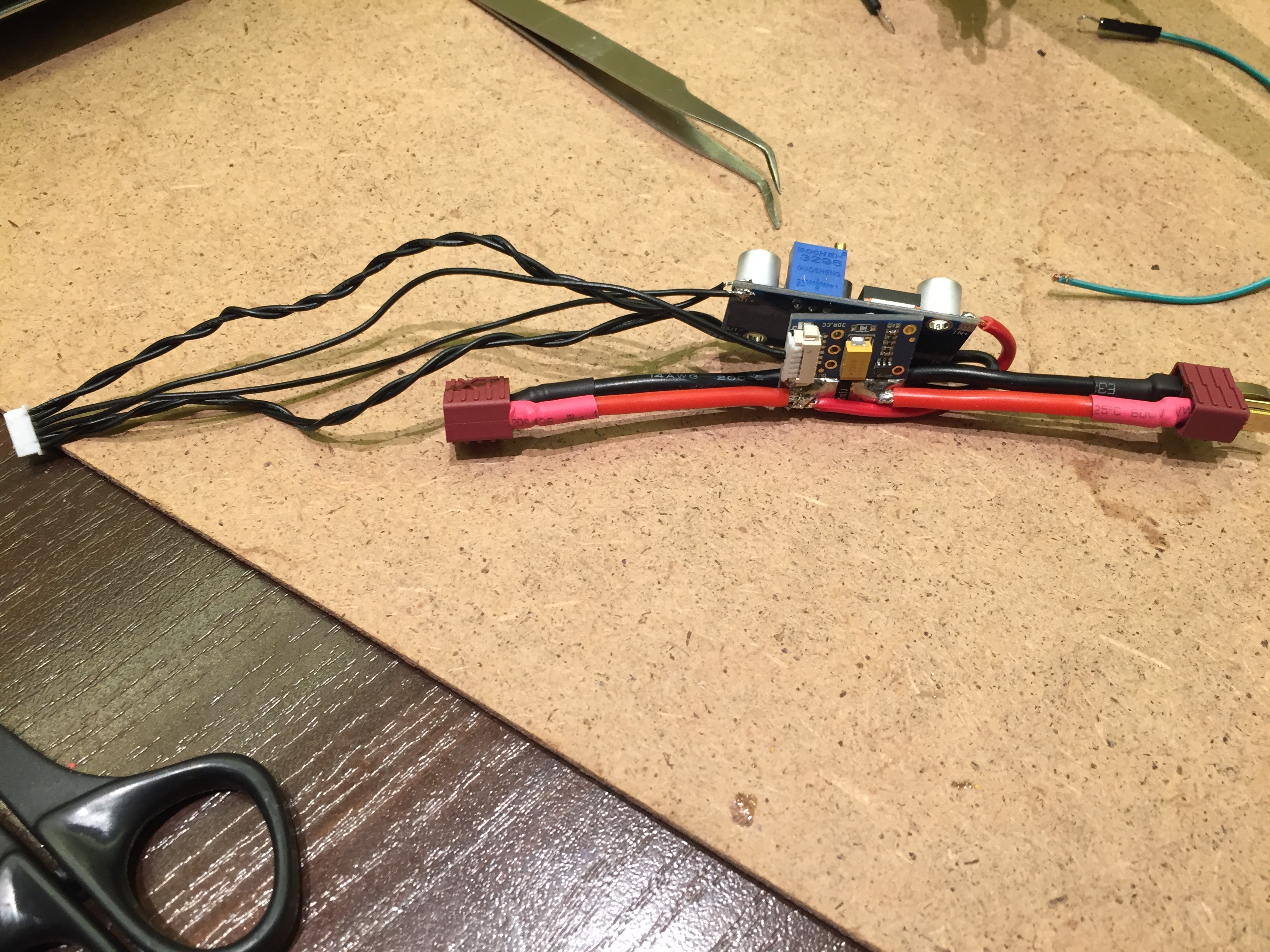
Решил соорудить сам питание для нее из LM2596 и питать 5ью вольтами через разъем PM. Почему именно через PM? Потому что у меня есть павер модуль (к слову, он приехал с али сломанным и питание не давал вообще никакого) и я использовал его в качестве сенсора.
Сделал я вот что: припаялся к силовым проводам, где стоит повер модуль, и питание пустил в тот же штекер из повер модуля:

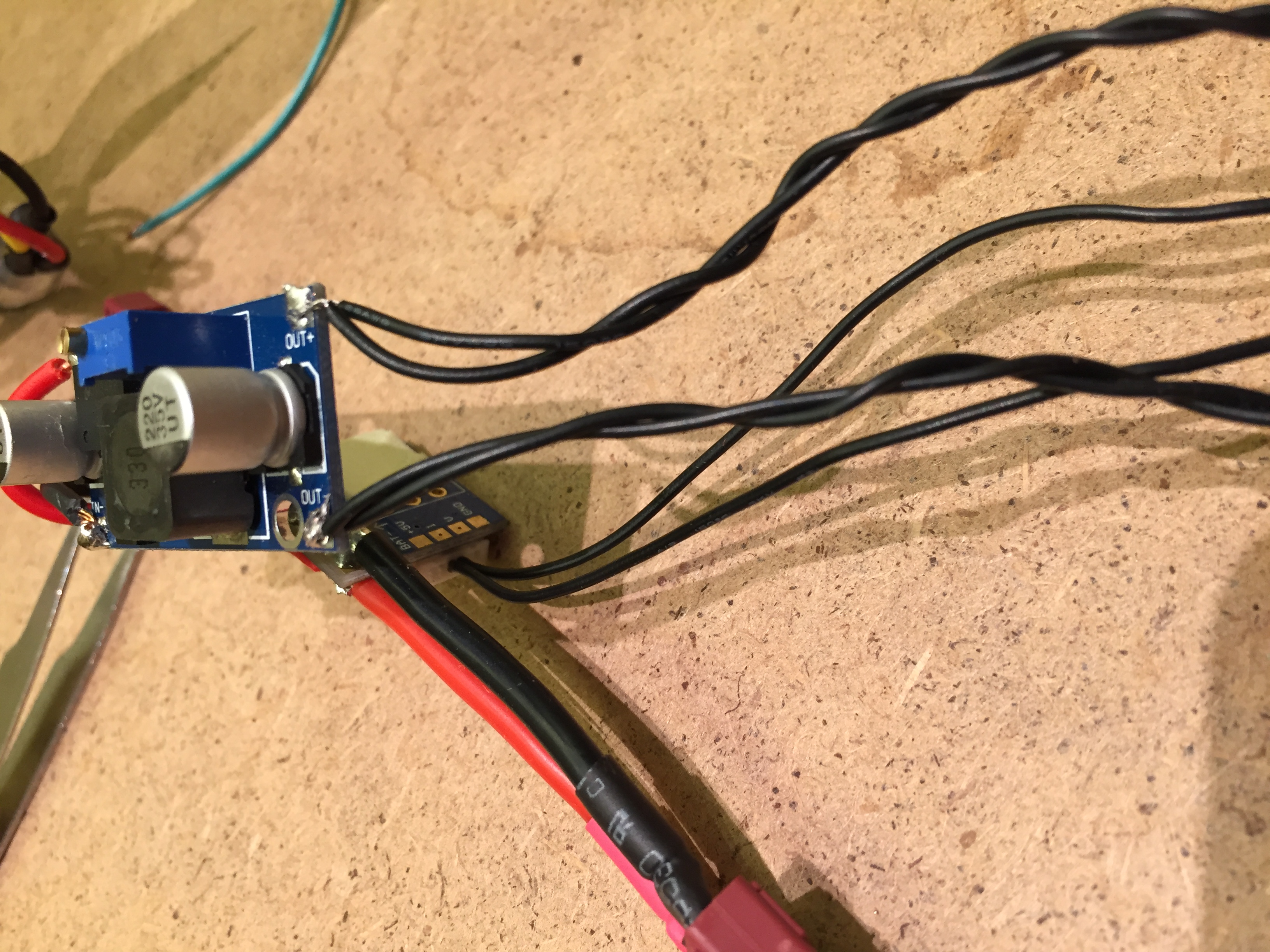
Выставил питание ровно в 5v.
Почему так вышло - я даже не знаю … проверял все “на коленке” перед пайкой - работало отлично.
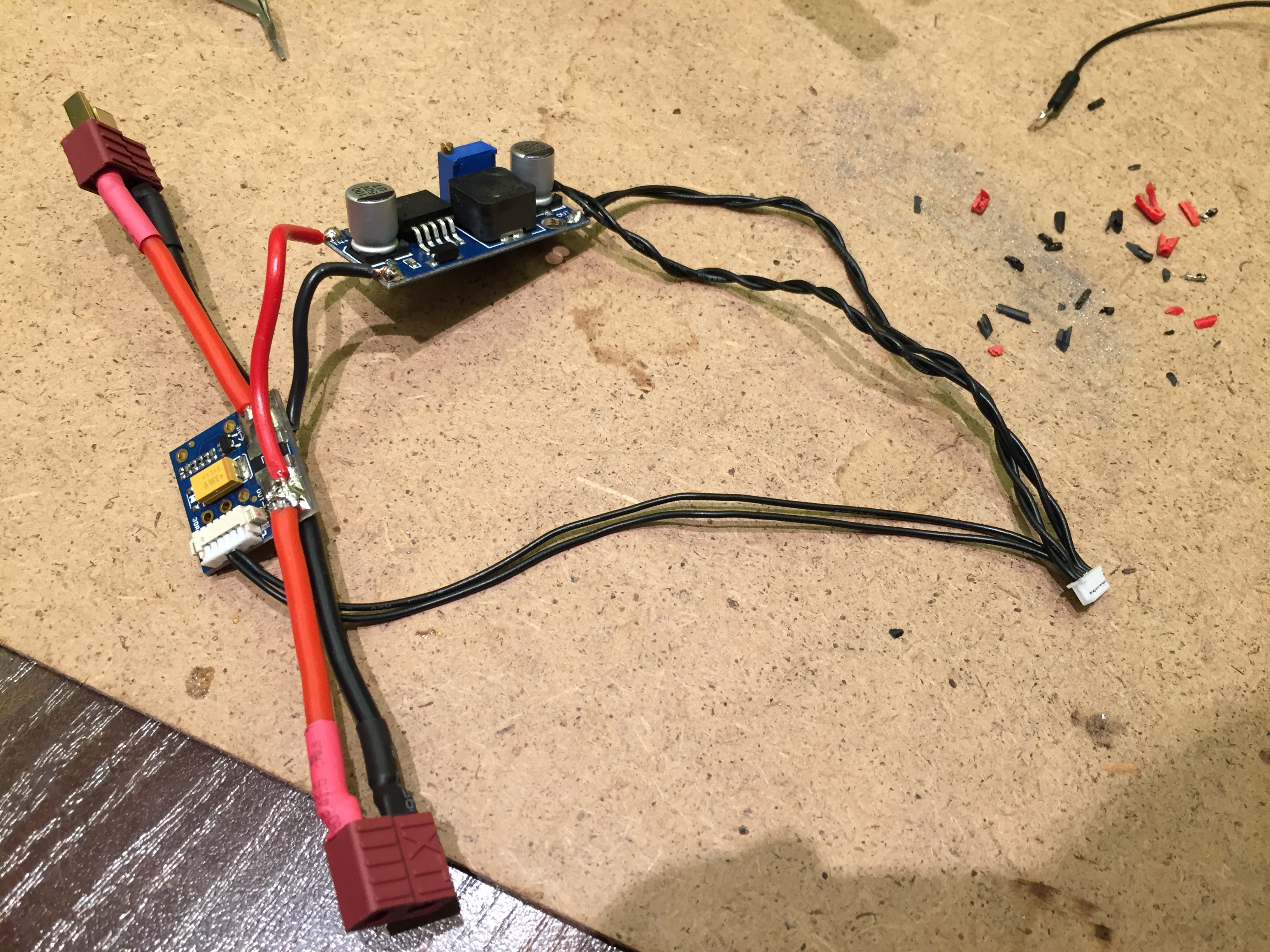
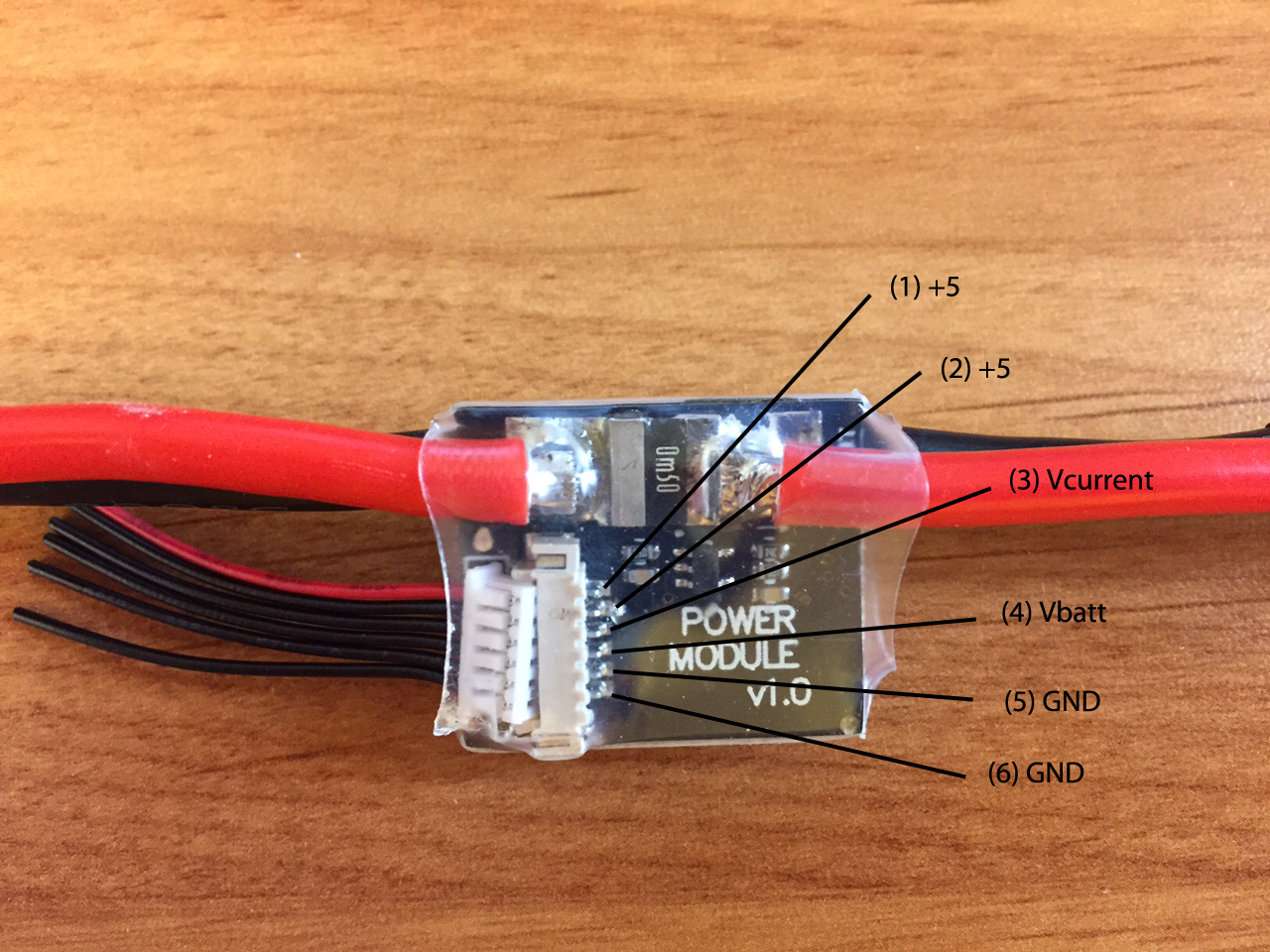
Есть только одно предположение - я взял и оба плюса и оба минуса из PM разъема и спаял их вместе, по сути.
Пользовался распиновкой и прозванивал PM разъем:
Хотя все равно мне не понятно почему это случилось.
У меня такие прекрасно работают на двух квадрах, с АРМ2.5.2 и 2.6
А питаете через INPUTS без перемычки JP1? или через PM разъем?
Они у вас тоже выдают по 5.3 вольта? Какой вольтаж на выходах (пинах)?
Спасибо!
А еще для надежности заменить разъемы на XT-60.
А что не так с T-plug?
Сейчас почти нет модулей без компаса. Но все же надо смотреть.
Если GPS как на картинке то компас есть, это разъемчик с 2мя проводами, или можно заглянуть под крышку, если есть маленький квадратный чип с маркеровкой L883 то это компас.
На самом деле да, такой как на картинке. С двумя проводами.
Снял крышку, но L883 не нашел. Может тоже заменили на какой-то аналог?


Но 2 провода есть. И по разъемам подходят - SDA / SDL … хмм.
использовать внешний компас встроенный в GPS, на штанге.
Это само-собой, но у меня на руках его еще нету, а полетать на выходных хочется. Есть ли какие-то методы борьбы с ними?
У меня в комплекте шел обычный Ublox neo 6m, в нем же нету компаса:

Кстати, посоветуйте какой GPS + Compass лучше? Сейчас и закажу.
А такой еще вопрос - как минимизировать кол-во наводок от проводов, чтобы свести к минимуму их влияние на встроенный компас в APM 2.5?
Я собираю коптер на раме f450 и тут осознал, что мой APM находится в самом сердце всех этих магнитных полей.
Он у меня расположен вот так вот, “внутри” рамы, на “нижнем этаже”:

Сверху - батарея, телеметрия с передачиком, а снизу/по бокам - ESC и проводка к ним.
Я с магнитными полями/наводками - еще не сталкивался, расскажите как с ними бороться. Может экранировать чем-то? Дайте почитать может какой-то материал, где можно в этом разобраться?
Спасибо!
Ребята, вопрос по поводу питания APM 2.5:
Заказал с aliexpress вот такой UBEC:

А он на выходе выдает не ровно 5v, а ~5.25-5.3v
Это не много для APM, можно ли столько подавать на PM разъем?
А то слышал, что идеальное напряжение для него - 4.9, при 5.1 уже могут быть проблемы.
Решил переспросить.
И еще - если питаю APM от ESC (они выдают ровно 5v) - то на выходе (на пинах) напряжение 4.6 вольта. Это не мало? Там же тоже должно быть ровно 5.
Что скажете?
у меня и так работает, нет не перепаивал, а 5В беру от UBEC
А напряжение на пинах 5в ровно? Телеметрию/приемник все питаете от платы?
у меня такая же плата все нормально перешилось, а проводок то налево тянуть надо)
А почему налево? Я нигде никаких инструкций не нашел. Кстати, gps и так работал. Вроде)
О, а раз у вас такая же плата, тогда еще один вопрос - перепаивали преобразователь на 3.3 вольта? Что используете в качестве основного источника 5в?
Спасибо)
Привет.
Ребята, у меня 2 вопроса. Оба глупых. Извините новичка.
Заказал себе APM с алиэксперсс. Пришел вот этот девайс, который на фотографиях.
Я его запустил, настроил, он работает. Даже чуть-чуть полетал на нем и словил первый краш 😃
Так вот, вопросы:
-
Как на нем перепрошить PPM encoder? Все инструкции которые я находил - были для других плат, не таких, как моя.
-
Я GPS правильно подключил? Почему некоторые тянут нижний шнур в разъем I2C?
спасибо 😒
Привет всем.
Я новенький здесь и в теме квадрокоптеростроения в целом.
В данный момент строю свой первый коптер на раме DJI F450, а в качестве полетного контроллера использую APM 2.6

У меня возник вопрос следующего характера: обязательно ли контроллер размещать строго на уровне пропеллеров?
Во всех инструкциях и форумах говорят о том, что контроллер должен быть строго в центре квадрокоптера и на одном уровне с пропеллерами.
Официальный сайт ArduPilot говорит вот что:
It should be placed close to the center of gravity of the vehicle (both horizontally and vertically). Generally this means it should be placed within a few centimeters of the middle of the vehicle and level with the motors. It is not critical that it is placed exactly at the middle but closer is better (there are no recorded cases of problems caused by the controller being far from the centre of gravity).
Т.е. они говорят, что размещать в центре масс (вертикально и горизонтально) нужно, но при этом зафиксированных проблем не было, если размещать его не там.
Дело в том, что с этой рамой размещать его по центру пропеллеров банально неудобно. Для меня идеальным вариантом было бы разместить контроллер + передатчики (управление + телеметрия) на “первом уровне”, который находится под осями рамы. А наверх кинуть аккумулятор.
На форуме подобных тем и рассуждений не нашел, потому решил спросить.
Проясните ситуацию, кто-то вообще сравнивал способы расположения контроллера? На что это влияет? Сильно ли?
Спасибо.