Activity
А есть такие прошивки?
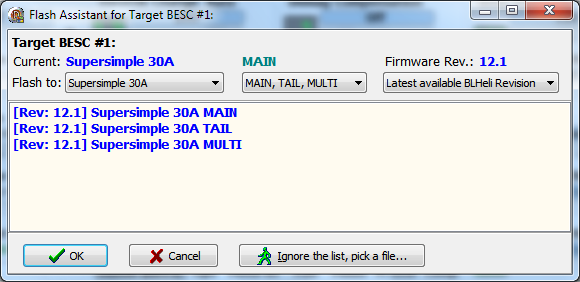
В смысле? Конечно. У blheli можно выбрать при прошивке, для чего прошивку ты заливаешь. Там multi, main и tail. Вот main - это как раз вертолётная прошивка для мотора основного ротора. И там можно выставить отсечку по напруге.
Вот здесь выбирать:
Купил популярные регули FVT Little bee BLHeli-s SPRING 20A. Прошивка A-H-25.
Хочу использовать Li-Ion сборки. Может кто знает/проверял, есть ли у данных регуляторов отключение по напряжению отсечки? В BLHeli конфигураторе такой настройки нет.
Если перепрошить как вертолётные - то есть отсечка. В коптерной версии нет.
движки ноунейм на 920 кв.
А не может быть дело в проводах, или в подаче питания к регулю, или в обмотке мотора? Подёргать, померить. Плату распределения питания (если она есть) погнуть, подёргать провода, всё это под постоянным измерением прозвонкой или осциллографом. Ну просто в такой ситуации, полётник - это последнее, на что можно бы подумать
Поделитесь опытом, как обойти NFZ.
Только оторвать GPS, я так думаю. Без GPS коптер стартует. Хотя и ругается всеми словами. Но повисеть на месте, надо понимать, не выйдет, летать будете в Atti
Кстати, не знаю, как коптер отреагирует на взлёт без GPS, и внезапное подключение его в полёте. Тогда, чисто теоретически, можно поставить какой-нибудь ключ с таймером, чтобы на взлёте ГПСа не было, а потом уже в полёте он подключался. Дальше зависит от прошивки. Если она тупая - коптер рванётся улетать в сторону от NFZ (упираться в забор). И это провал. Если нет - то будет летать и ругаться. Но мне кажется - первый вариант.
Окей, гугл. Почему тогда у меня коптер крутит на спуске, расскажете?
Может, кому пригодится. Расскажу о фейле, который мне стоил почти года полётов.
Так вот. Суть проблемы - начинаю снижать коптер - появляются жуткие глюки - коптер крутит, кидает по YAW из стороны в сторону, камера поворачивается (а вот это важно). Ну, в общем, налицо проблемы с компасом. Лечил и так и эдак, почти год. Размагничивал самодельным размагничивателем, сильным магнитом по хитрой методике, купил даже CFixer, размагничивал хрен знает сколько раз им тоже. Результат - НОЛЬ. Абсолютно ничего не помогало.
Неделю назад решил ещё раз попробовать полетать, та же история. Абсолютно случайно ткнул в “RC Calibration” - и вот ОНО!!!
Оказалось, в ПУЛЬТЕ сдох стик! В пульте, Карл! В новом брендовом пульте сдох канал YAW. И когда газ в верхней части или в середине - всё более-менее ок, но стоит опустить стик ниже середины - канал начинает колбасить от максимума к минимуму. Это просто рука лицо. В целом, зная причину, хочется сказать “ну это же очевииидно”. Вот только нет, не очевидно. Совсем.
Разобрал пульт прям в полевых условиях. Сделан хорошо, но стики на потенциометрах. Могли бы и бесконтактные датчики поставить. Всё посмотрел, подёргал разъёмы, перепроложил по-другому провод от потенциометра YAW - и фигак! Всё прошло. Как и не было.
Так что вот. Если вдруг что - пульт тоже надо проверять.
error: programm enable: target doesn’t answer.
Ну, это туши свет. Такой камень (видимо, с заблокированным RESET pin) можно оживить только высоковольтным параллельным программатором. Или Fuse doctor что ли оно называется, забыл уже. Короче, проще новый купить.
Куда копать?
Эммм… А почему сначала фьюзы, а потом прошивка? Может, конечно, это не критично ни разу, но всё-таки
Новости про согласование полётов.
03.02.20 был подписан ряд поправок к Правилам использования воздушного пространства РФ.
Благодаря этому получение разрешения на проведение полетов требуется для всех типов воздушных судов “…за исключением выполнения визуальных полетов беспилотными воздушными судами в пределах прямой видимости, осуществляемых беспилотными воздушными судами с максимальной взлетной массой до 30 кг в светлое время суток на высотах менее 150 метров от земной или водной поверхности вне диспетчерских зон аэродромов гражданской авиации, районов аэродромов (вертодромов) государственной и экспериментальной авиации, запретных зон, зон ограничения полетов, специальных зон, воздушного пространства над местами проведения охранных мероприятий, публичных мероприятий и официальных спортивных соревнований, а также на удалении не менее 5 км от контрольных точек неконтролируемых аэродромов и посадочных площадок.”
Поставление вступает в силу по истечении 7 дней после дня их первого официального опубликования.
Документ
Ссылка на группу вконтакте, откуда я это дело скопипастил.
Развели, блин, дискуссию. Намагниченность в коптере - от проводов батареи. Ну, это главный источник наводок на компас. Ну а так да - моторы, винтики (кроме шуток), подвес, всякие магнитные защёлки и прочее. Проверить, велика ли проблема, легко с помощью самого обычного компаса - если на стрелку нет заметного влияния при наборе оборотов моторов, и при этом при поворачивании коптера вокруг своей оси - компас показывает в одну сторону - значит, всё ок, и в это место можно и гпс приёмник ставить без проблем.
Так. От МАГНИТНЫХ полей экранируют только ферромагнитные материалы. Ну там, физика, вот это всё. Карбон к магниту прилипает? нет? Значит не экранирует. Всё.
От электромагнитных наводок защищает любой проводящий материал. В том числе и карбон. Но электромагнитные - они имеют только изменяющуюся природу. в смысле постоянного электромагнитного поля не бывает. Ну, как-то так.
Ещё раз. От электромагнитных помех карбон защищает. От магнитных наводок - нет, он прозрачный для магнитного поля.
Эммм… А давно ли карбон начал от магнитных полей защищать?
Компас надо защищать от магнитных наводок. Например, если под ним идут силовые провода - к регулям там, или от батареи куда-то - это бэд. Чтобы пользователю не греть голову - джы снабжают свои модули штангой, чтобы отдалить (а не заэкранировать!) модуль от источника магнитного поля.
Из-за новой конструкции дрона для полета достаточно двух двигателей
Хм. Этой новой конструкции лет столько же, сколько и самим коптерам.
Интересно, чем они собираются бороть классические болячки бикоптера - раскачку по pitch , ну и адский износ сервоприводов
З.Ы. Ждём ещё лет через 5 - мы представляем НОВЫЙ коптер! Такого ещё не было! 1 ротор, ВИШ. Мы назвали её инновационно - ВЕРТОЛЁТ!!! 😁
видео линк пропадает примерно на 10 секунд, но дрон всё равно управляется
Перегрев камеры, плохая карта памяти. посмотрите, крутится ли вентилятор. А если не в полёте камеру включить и понаблюдать?
Но решила - раз мидрон нашел положение и дал разрешение на взлет, то он должен взлететь и полететь, несмотря ни на какие предупреждения.
Ну да, ну да… Могу только удачи пожелать с таким подходом. Я так мидрон почти утопил, после того, как он “дал разрешение на взлёт”, взлетел и похреначил вбок как ужаленный.
Конечно, “не хрен с ним”,
Нет, я серьёзно.
всего 20К - навернётся и хрен с ним
Это не 350К за инспаер, который, к слову, тоже может навернуться.
Добавляю полезное.
Квадрик калибровала ровно ОДИН раз, после покупки (в поле у дома). Методом “восьмерки”, что занимает не больше 10-15 сек. Больше калибровать его не надо! Не имеет значения, куда вы поехали. Единожды правильно откалиброванный, он больше не нуждается в настройке компаса и датчиков, и не нужно его мучить (и себя…)) чего-то там размагничивать и шаманить.
Окей, гугл. Почему тогда у меня коптер крутит на спуске, расскажете?
Бегущие сообщения о нехорошей магнитной обстановке можно игнорировать.
Ну да, коптер стоит всего 20К - навернётся и хрен с ним. Эти сообщения как бы намекают пользователю “я не могу решить, куда лететь - ты там поглядывай как-чего”.
Сообщение “Cannot take off” лечится за несколько секунд, медленным аккуратным поворотом тушки на твердой поверхности в любую сторону и наблюдением за экраном. Как только появится “Could take OFF”, вращение остановить, или даже чуть-чуть “откатить” назад (инерция). Если быть более точной, то тело мидрона надо сразу поставить перпендикулярно линии Север-Юг (для этого хорошо иметь обычный компас, чтобы точно знать - где магнитный Север)
Вы серьёзно думаете, что это нормально, в плане подготовки к полёту? Только в бубен постучать перед взлётом не хватает.
видит 19 спутников, но при этом ползёт строка о слабом сигнале позиционирования и с гпс постоянно падает в атти?
Так количество спутников не говорит о качестве. Там даже прямо параметр есть, у ГПС приёмников - какая точность позиционирования прямо сейчас. И он слабо коррелирует с количеством. Возможно, помех много, или облаков, или ещё какая фигня. Опять же, для позиционирования в ГПС режиме используются не координаты, а скорость, а она ещё более зависима от помех.
К слову. Отчитываюсь об опыте использования специальной приблуды для размагничивания компасов “CFixer”. Не сказать, что прямо “фуфло”, но так себе. То ли у меня такие жёсткие магнитные поля дома (во что я не верю), то ли компасы замагничены по самое некуда, но после обработки обоих компасом фиксером - ничего особо не поменялось. Калибровка съехала, то есть, какое-то действие на компасы было оказано, но при всём при этом compass interferred - никуда не делось. В общем, не стоит оно тех 4 тыщь, что за эту штуку просят. Но отвёртки размагничивает =)
Скажите вы когда видео 4к копируете с флешки на комп, изображение идет рывками?
Я думал из за флешки.
Комп не справляется, как за нечего делать.
Ну а если рывками прямо с флешки - 90% дело в картридере.
Я себе купил такой вот, честное 3.0, на 2.0 скорость около 30 МБ\с.

Как не пропустить важный момент, когда место на карточке заканчивается?
Взять с собой картридер, подключать к телефону, смотреть? Я так делаю. И фоточки в отвратном качестве можно скопировать на посмотреть.
на 32 битных контроллерах с ардукоптер даже если компас показывает совсем от балды достаточно сделать несколько пролетов по прямой для того чтобы екф понял что компас показывает околесицу и исключил его показания из навигации, после нескольких пролетов по прямой будет держать позицию без достоверного компаса.
с инавом видимо как с апм, тк. екф и прочего интеллекта там нет
Твоюжмаму!! Я джва года (с) ждал, когда же это прикрутят уже. Девять лет прошло, и, похоже, дождался!!! Буду проверять =)
Спасибо тому человеку, который посоветовал включать atti режим всегда перед взлетом.
…
Подготовил квадрокоптер к запуску, смотрю на экране спутников то 13, то 17, то вообще NONE.
…
вылетает приложение.
Я в панике, включаю снова и опять не отвечает.
… кручу колесико туда сюда.
В каком положении gps, а в каком atti хрен его знает.Приложение же не работает.
…
Приложение переустановил дома, пока работает и не вылетает.
…
И вообще режим atti должен быть по умолчанию включен, это не доработка изготовителя
…
Скажите сколько дрон должен видеть спутников перед взлетом?
Получается18?
Так. Атти да, атти лучше включать, если возможны проблемы с ГПС. И вот “то 13, то 12 то none” - это прям проблемы-проблемы.
К сожалению, практика показала, что компас в атти один хрен используется. А не должен. Это печалище.
Атти включается “вверх” (против часовой), гпс - против часовой, “вниз”.
Если тяжко запомнить, лучше записать, прям на корпусе, дабы он белый =)
Приложение вылетает, когда у телефона мало памяти. Память чистить перед запуском, удалять всё, что работает в фоне (алиэкспресс в особенности). Но вообще - менять аппарат.
То, что настройки не сохраняются - косяк сяоми. Причём, им прямо при старте продаж на групсах сказали - типа, сделайте сохранение настроек. В лучших узкоглазых традициях выключили английский и “моя твоя не понимай”.
Спутников достаточно 10 (на самом деле 6). Но они должны быть прям железобетонные. Мидрон считает, что спутников мало, если их меньше 13.
Брал у телемастера, но не петля, а довольно компактный приборчик. В часовых мастерских можно поспрашивать.
Представляю, что за приборчик. Это для размагнитки часов. Не совсем, как я понимаю, подходящая штука. И включать надо в полуметре от коптера.
Я пробовал размагнитить разобранным трансформатором - результата нет. Ну, как нет… Трансформатор у меня в конце концов таки пыхнул от перегрева =). Но это не тот результат, на который я рассчитывал.
Народ, понимаю, что спрашивать скорее всего бесполезно, но вдруг.
Кто-нибудь размагничивал компасы на мидроне? Чем? С каким результатом?
И вдогонку. Каким образом определяется “магнитная обстановка”? Та самая, которая “good (сказки, никогда не бывает), medium, bad (всегда и везде)”. Я пробовал замагничивать компас мощным постоянным магнитом, чтобы показания по осям совпадали (с учётом, что косорылые изначально сделали всё через жопу, и ось Х компаса А соответсвует оси У компаса В… у меня нет слов). Замагнитка вроде помогала, коптер говорил, что магнитная обстановка “medium” при любом угле поворота. Но. После перезагрузки коптера - всё по новой. Опять всё “bad”, “compass interferred…” ну и всё такое.
что большинство улетов в китай происходит после отваливания коптера от пульта. Тут ATTI уже не поможет
Ну, по моему опыту не совсем так. Улёты идут в режиме GPS. В атти более-менее коптер летает. А вот если в это время пропадёт связь с пультом, или пилот по дурости щёлкнет RTH - вот тут и начинается жопа. Коптер в RTH находится в GPS режиме - и бодро улетает нахрен.
Кстати, это нормально, что во время полета смартфон высаживает свой аккумулятор чуть ли не быстрее, чем сам дрон?! И смарт не должен питаться от пульта при соединении шнурком?
Абсолютно нормально. Особенно, если телефон не первой свежести - он ещё и греется как печка.
Питаться должен, это как раз не даёт ему загнуться раньше времени.
С этим согласен, безусловно, но
p-ster.livejournal.com/15820.html
Счас посмотрел видео с коптера. 4 минуты, 1.73 ГБ. Посчитал тупым делением - получилось 62.2 мегабита - видеопоток. Минимальная скорость записи, на которой файл можно теоретически записать без дропов - 7.6 МБ\сек. Фактически скорость записи, насколько я могу судить по тем картам, что у меня есть, плавает. Карту надо минимум 10 МБ\сек. По опыту - на такой карте бывают проблемы. Например, вообще не записанный кусок видео. Поэтому, как раньше и говорил - 18 МБ\сек - выбор благородных сэров =))
Нашел причину пиксельности своего видео. Это частота кадра 100.
Кстати, да! 100, а не 60. Щас посмотрел - у меня адище тоже на 100 fps.
Может всё таки Мегабит?
В честь чего бы? Скорость записи на носитель всегда в мегабайтах с секунду измеряется. Нормальная скорость для современных карт.
Все ок, UHS маркетинг
Я так и думала…
Меньше думайте, больше читайте даташиты. 20МБ\сек и 80МБ\сек - маркетинг, ога. Эксперты, блин, диванные
как видим , во втором видео качество отвратительное , грешу на карту
Уж сколько раз твердили миру…
Мидрон - убог по прошивке. Жопорукие китайцы что-то там накрутили не так, и если режим съёмки выставлен НЕ 4К, то качество отвратное. Снимайте исключительно в 4К@30 и будет счастье.
Особенно адски выглядит режим 1080@60fps - там пиксели, прям как воробьи =))). Смиритесь, это китайцы.
Кстати, ещё один хинт - никогда не снивайте фото в JPG. Только DNG. Ибо - китайцы же! - при записи JPG коптер делает кучу артефактов, которые выглядят как хаотично разбросанные точки светлого цвета. Я грешил на камеру, на карту памяти - оказалось - снимаешь в raw - и нету никаких точек!
Ну и надо понимать, что сенсор у камеры - как у мобилки, поэтому чёткость и диапазон как у фантома 4-го ждать не следует. Я тут приводил сравнение как-то.
Карта нужна минимум 10-го класса. Причём не та, на которой написано “10”, а реально 10-го, со скоростью записи как минимум 18 МБ/сек. А лучше U1. Там даже если наврут, и 80МБ/с не будет - хотя бы 18 будет =)
Что такое “дизармить” дрон? Какие действия?
Дизарм - выключение состояния полёта, выключение моторов другими словами.
Если я всё правильно помню - газ вниз в течение 4, что ли, секунд после того, как коптер сядет на землю (ну или после того, как его поймаете). В полёте не выключится. Если делается автопосадка - сам вырубится.
Есть ещё аварийное отключение - обе кнопки на пульте зажать на 8 секунд. Дизармится в абсолютно любом случае. Ага, и в полёте тоже (на то и рассчёт). Надо понимать, что аварийное отключение в полёте вызовет краш.
Это на случай, если коптер улетает в Китай и вы с ним уже попрощались, в принципе, но хочется хоть что-то спасти, либо если футаж с камеры ценнее самого аппарата - пока вы его видите, вы его можете уронить туда, где хотя бы сможете найти. Кстати, если снимается что-то важное-ценное, и возможен краш (много воды рядом, ЛЭП неподалёку) - лучше бы заклеить дырку под карту памяти малярным скотчем - так карта при ударе не улетит чёрт-те куда.
Ибо ошибки компаса могут привести к “унитазингу” и даже крашу, но никак не к улёту; он отвечает всего лишь, условно говоря, за направление “морды” аппарата.
К большому сожалению, не всё так просто. Морда мордой, но стабилизируется аппарат по сигналу “скорость” с модуля GPS, а не по положению, как некоторые думают. А вот вектор этой скорости определяет компас. Ну да это не столь важно.
Имел лично такую штуку. Взлетаю в месте, где “compass error” - сам дурак, да. Собственно взлёт проходит идеально (он в атти идёт, есличо). Коптер поднимается примерно на 5 метров, переходит в режим GPS - и псдц - наклоняется градусов на 30 и шпилит в речку! Хорошо, речка была пониже, чем я стоял, коптер не булькнул. Даю полный газ - коптер неспешно поднимается вверх, продолжая активно от меня отлетать, в общем, потом я переключился в атти - и сразу все проблемы пропали! Я его подтащил к себе, схватил за ногу и дизармил.
Проблема “компасс эррор” - в компасе. А точнее, в том, что показания двух компасов слишком сильно отличаются, и коптер, падла, вместо того, чтобы отключить стабилизацию по компасу, сходит с ума.
взял сам улетел, да вы наверно видели это видео
может спутников мало было, попутал или просто глюканул.
Первый признак что улетит - надпись на экране в процессе подготовки к полётам “compass error”. Не “compass interfered”, а именно “error”. Даже если это дело при определённых условиях пропадает. Если оно происходит постоянно - от полётов в этом месте лучше отказаться. Улетит 100%. Ошибку эту, кстати, можно увидеть, если коптер на крышу машины поставить. Прошивка от сяоми сырая и тупая, этот момент не определяет.
Ну и ещё один такой маленький совет для первого раза. Включите перед стартом ATTI режим. Он будет включаться колесом справа на пульте - против часовой стрелки атти, по часовой GPS. И если вдруг случается пипец - коптер полетел непонятно куда, хотя должен висеть - врубайте атти и по FPV ползите домой (RTH не включать! быть беде). Трабл в том, что в полёте атти не включить (за это надо вбить гвоздь в башку разработчикам), и если заранее не предусмотреть - коптер улетит.
Есть хороший стих на эту тему- “Не планируй неудачу”
Хреновый стих. Не читал, но осуждаю (с). Как раз таки надо распланировать, что делать в случае неудачи.
а ты его попробуй в квартире заармить в АTTI а потом говори… он не даст !!! а вот в VPU запросто
А ты прежде чем с видом знатока утверждения делать - проверь!!!
Я не первый день этим занимаюсь и знаю что говорю!

ps А вот компас, блин, используется… Это прискорбно. Не должно быть компаса в атти, не должно!
ATTI не будет работать в помещении, так как ему тоже нужны спутники для арма
Давно ли режиму на гирах и акселе понадобились спутники??? Ему даже компас, к большому счастью, не требуется
З.Ы. Продам мидрон 4К, если кому надо.
что с ним (или со мной) не так ?
Что не так - показывает софтина на телефоне.
Ну там, скорее всего - либо спутников нету, либо компас замагничен, либо ещё чего. Переключите в атти - в атти запустится.
На обратной стороне платы, имеются 6 точек, но как именно прошивать такой регуль в инете не нашел…
Ну, площадки даже по фотке видно, что соединены с ISP чипа. В частности, крайние три справа. Подозреваю, что RST - это четвёртый пин - надо прозванивать. А оставшиеся - питалово. Та фотке написано, что внутри симонк. Ну то есть либо собрать прошивку симонк с задним ходом, либо подобрать блхели.
Дядька реально застрял в Гатвиге. И дядька реальный летчик.
И что? От того, что у реального лётчика случился реальный баттхёрт, все теперь должны упасть ниц, и внемлить его великому мнению, основанному на очевидных и провокационных фейках?
А я вот реальный инженер. И если я теперь скажу, что коптер при столкновении разжижается и проходит сквозь препятствие, все должны сказать “А, ну да, Егор же сказал, что всё ок, давайте загоним вон ту окту вон в того дяденьку”
@Dynamitry
Спасибо, поржал!!! Я даже стесняюсь спросить - это самосбор или какая-то адская модификация целикового пылесоса?
Почему некоторые модели планшетов на андроиде не поддерживаются приложением Мидрона? Где-то есть минимальные требования?
Во-первых, софтина не работает на процессорах Intel, поэтому все планшеты с дуалбутом - мимо.
Во-вторых, нужен мощный проц. Причём, чем выше разрешение экрана, тем мощнее. Я с этим столкнулся на своей старенькой Xperia Z.
В-третьих, нужно минимум 450 МБ свободной оперативы.
залил пластиком-71 и он помер
Товарищи мои, занимающиеся профессионально электроникой, сильно меня отговаривали от использования пластика-71. Типа, проводит, а на СВЧ вообще беда. Как-то так.
видео, но мне показалось интересным
На мой взгляд, видео предвзято.
- Коптером выстреливают в крыло на большой скорости. Думаю, не надо расписывать, с чего это я взял. Подозреваю, что самолёты с такой обшивкой крыла не развивают такую скорость. Это реально пивная банка.
- Наибольший ущерб наносит аккумулятор. Это логично, он самый тяжёлый и при этом компактный. Небольшая пробивная сила, видимо из-за тяжёленьких и очень прочных моторчиков, имеется у концов лучей.
- Даже при всём при этом - ничего страшного не произошло. Ну, дырка в крыле. несущие конструкции не пострадали, пострадала только обшивка. На пункте прилёта заклеят скотчем и полетят домой на починку. Птица вызвала бы ничуть не меньшие повреждения.
У меня дрон начал медленно вращаться против часовой стрелки, посадил его, сделал настройку компаса и вновь взлетел - стал меньше вращаться, но все равно вращается…
Что это может быть? И как от этого избавиться?
Компас. Один из двух, или оба сразу.
Как найдёте причину НАДЁЖНО избавиться от этого геморроя - дайте знать.
Я размагничивал оба компаса разобранным трансформатором - не помогло. Потом пытался выравнять их показания, водя вокруг них магнитом - не особо. Спустя примерно месяц дело решилось как-то само собой. Коптер начал калиброваться (раньше всегда был failed). Летать не пробовал, некогда.
Первый компас в ноге, там где винтики. Второй компас - в морде, НЕ там где ГПС, а спереди-слева, и чуть снизу от центра.
Пробовал. И вам не советую. Компас сходит с ума от металла. И после взлета несёт дрон в сторону. Это мне стоило камеры.
А если взлетать в атти? По идее, у нормальных людей, в атти используется только гиро и аксель. Компас не должен подсирать в этом режиме.
Другой вопрос, что после взлёта в атти коптер потащит в сторону ветром, надо быть к этому готовым.
Ну и сразу уж тогда здесь вопрос задам. Кто знает способ по-умолчанию функцию правого колеса на пульте оставить только за переключением атти-гпс? Ибо обнаружил крайне неприятную и опасную фичу, которая так-то не фича, а баг: После взлёта в ГПС режиме, атти уже не включить. Софтина говорит, мол “тефаль думает за тебя, в полёте нехрен ничего переключать, сначала приземлись” Особенно это “приятно”, когда коптер из-за глюков компаса куда-то хз куда летит, и на команды реагирует так себе. Соответственно, если зафтыкал и забыл перед вылетом в меню принудительно включить режим атти - всё, полетели в Китай.