Activity
Вот прямо вот совсем несогласен. Монтаж отвратительнейший. Видео жутко затянуто, при этом почему-то показать пролёты дольше 5 секунд не позволяет религия - обязательно надо сунуть ни к селу ни к городу перебивку статичным кадром. Сюжет не понятен от слова совсем. Короче, фуфел какой-то. 7 минут с трудом осилил, дальше выключил
Ну то есть - кадры великолепные, постановка кадра, всё хорошо. Натура хорошая - Шанхай там, вот это всё. Но вот монтаж…
А не 3D ли, часом, это печать? Сбоку похоже на слои. Я даже знаю принтер, который умеет карбоновую нить укладывать прям вот в слой.
Обалденно!!! Сам такое сделать хотел, но не знал с чего начать. Теперь знаю =)
Сколько веса получилось в итоге?
Моделька, кстати, это клон самолётика Multiplex Fox. Его, вроде бы, переделывали под р\у
Понято, буду посматривать.
Автотюн, конечно же, искал в разных вариантах (и пробовал тоже в разных). Всё равно в итоге всё сводится либо тупо к зиглер-никольсу и вводу в автоколебания (что моветон и фу-фу-фу), либо к каким-то покрытым мраком алгоритмам, изобретённым на коленке для конкретного случая.
Скажите, пожалуйста, а где можно почитать про
Стандартные методы (через отклик на прямоугольный импульс)
Это метод Коэна-Куна? Там, где мы повышаем управляющее воздействие и ждём, пока процесс устаканится, потом отрезаем от этого 67, что ли, процентов, и что-то рассчитываем?
В этой связи есть вопрос. Если у нас процесс, такой как мотор, то мы подняли ток - поднялись обороты. Всё, вроде, логично. А если процесс вида “кран” - тогда что? Тут получается, мы дали, например, 10% увеличения управляющего воздействия - и объект поехал, и он не остановится, пока мы не уберём управляющее воздействие, или пока не упрётся в ограничение.
Ну, например, ездит тележка по рельсам. Если мы прикладываем усилие к тележке - она ведь так и будет катиться, пока не упрётся в край. Или пока мы не снимем усилие (допустим, что тележка оснащена тормозом, для простоты). И как в случае такого объекта автонастраивать ПИД? Есть ли какая-нибудь информация на этот счёт?
Ящетайу, что проще раз в 10 лет извиниться
Это, типа, такое извинение было? Оригинальненько.
Как говорится…
PLA - очень жёсткий пластик. Но вот нагрев - это да. При +50 - гнуться начинает, при +80 - уже практически течёт. Но зато деталь сечением 8х10мм и длиной миллиметров 50 - руками сломать у меня не получилось ну никак. На работе специально давал - все краснели, пыхтели, но не сломали. Причём infill не 100%, а что-то вроде 45.
ABS - я, если честно, не понял, что за зверь. При резком изгибе - гнётся, но если гнуть по радиусу - ломается один в один как спагетти. Стрёмно такое использовать.
Ну и выделяющийся стирол (канцероген, есличо) - тоже не прибавляет энтузиазма.
HIPS - очень прочный, но вроде как со всеми недостатками ABS - усадка, стирол, вот это всё. Есть приличный такой пробник от REC, всё не соберусь затестить
Flex - шляпа. Думал, будет прямо гибкий шо ух. Нифига. Похоже на канистру для автомасла. То есть, на куске сантиметров 20, конечно, гибкий. Но мелкие детали - дубина.
По поводу И. Интеграл убирает статическую ошибку, возникающую из-за несовершенства конструкции объекта регулирования, в частности, гистерезиса реакции на управляющее воздействие. Я по работе занимаюсь пневмоприводами - там гистерезис - это, например, трение в уплотнении пневмоцилиндра, или утечки из него же.
Применительно к коптерам - И-составляющая во внутреннем контуре (гира) не имеет большого влияния. Имеет смысл в контуре акселя и тем более - ГПС.
При выставлении слишком большого И начинается раскачка регулятора, но, в отличие от большого П - раскачка идёт гораздо более длинными волнами, и имеет тенденцию к увеличению амплитуды. Вызывается слишком медленным сбросом накопленной ошибки при движении объекта регулирования в сторону уменьшения ошибки. В результате (не из-за какой-нибудь там инерции, а исключительно по вине регулятора) объект пролетает заданное положение, сбрасывает таки накопленную ошибку, но, так как уплыл уже далеко, начинает копить её в обратном направлении. Как-то так.
А вот вопрос уважаемому сообществу - кто знаком с методиками автонастройки коэффициентов ПИД-регулятора? Методику Arducopter не рассматриваю - это весьма примитивный способ, вариация на тему метода Зиглера-Никольса не сороковых ли годов прошлого века =). Пока из того, что я находил - весьма интересно выглядит метод Коэна-Куна. Там все параметры регулятора рассчитываются за одну ступеньку управляющего воздействия.
ссылка на датчик битая.
А линейность вы проверяли? А то в такой конфигурации как-то сомнительно.
Эмм. Не, я не планирую использовать EEPROM или FLASH атмеги. Там пишешь сам в каждую конкретную ячейку.
А меня интересует, есть ли контроллер в карте памяти? Или, может, библиотека ардуиновская сама пишет в разные ячейки (что, конечно, вряд ли).
Знающие дяТьки-ардуинцы, подскажите мне такую штуку:
Когда я перезаписываю один и тот же файл на карте памяти 100500 раз в секунду - флешка изнашивается? Или внутре карты памяти есть хитрый контроллер, по типу как в SSD, который размещает файл при перезаписи каждый раз в новом секторе флеша?
Т.к. ардуино - штука довольно простая, подозреваю, что при перезаписи она не запаривается износом флеша, и, если писать один и тот же файл хотя бы 20 раз в секунду - через сутки-другие карте памяти придёт каюк.
Я для себя вижу такое решение - ставить внешнюю память (RAM), килобайта на 32-64-512, и по её заполнению сбрасывать всё на флешку, в отдельный файл.
По теме - а где перегрев? 90 градусов для регулятора - ну, это, конечно, много, но не перегрев. Силовые транзисторы современные до 150 градусов тащат. Другой вопрос, что обычно на таких температурах отклеиваются всякие скотчи и термосопли, которыми приклеивают регулятор =))
Приветствую!
Всё, как написано - смотрим в терминале, какая последняя строчка с “ОК”, запоминаем. Допустим, это восьмая строчка с конца. Теперь удаляем последнюю, вырезаем оставшиеся шесть, и вставляем перед той, которая последняя с ОК (которая была восьмой с конца). Всё. Если вдруг ситуация повторяется (опять на какой-то строчке - не ок) - повторяем действия в том же порядке.
- А пропан-воздушная смесь - всего жалких 3-4 очка, а вот же зараза: дома на куски разхносит…
Так её в дому и не 340 см3… А пару десятков кубов.
По поводу очка и батарейки. Ну, если бокс загерметить намертво - возможно, и сорвёт крышку. А скорее, крышка выгнется, образуется щель, через которую лишнее давление сбросится. Нет там столько газа сразу, чтоб сорвать.
Очевидное решение для герметичного бокса - разгерметизировать его =). Например, дырку просверлить в крышке, 1-3 мм в диаметре. Всё стравится, а в случае чего - и пальцем заткнуть можно. Или, как говорил, пламегаситель (вообще, это глушитель для всяких клапанов):

Оспади… Народ, вы чего?
Я занимаюсь взрывозащищённым оборудованием. Так вот, при взрыве 340 см3 ацетилена давление достигает 14 атмосфер. 14! а не 150, 200 и прочее. Здесь же батарейка-пукалка. Давление будет ноль целых хрен десятых. И бокс, походу из дюраля, со стенкой толщиной под 8 мм.
Если боитесь загорания аккума - ну, заряжайте его в кастрюле. Никуда он нафиг оттуда не денется. И 18650 тоже делалась явно не для того, чтобы взрываться. Ну вышибет у неё крышку, загорится внутри содержимое. Самое опасное - температура и дым.
К слову, про пламегаситель. Есть такие штуковины у фирм, производящих пневмооборудование, у SMC, например. Они сделаны из спечённого порошка то ли латуни, то ли хз чего, похожи на распылитель для аквариума. Кстати, распылитель для аквариума - вполне сойдёт за бюджетный пламегаситель.
почему-то связь не восстанавливалась, даже если направишь антенну пульта прямо на дрон
Вообще-то - крайне тупо тыкать антенной в “дрон” (почему дрон? Он чего, вооружение несёт? Ибо дрон - он боевой, а всё остальное - не дрон), ибо у антенны в направлении штыря минимум диаграммы направленности. И связь так не улучшишь.
Неплохо! Камень, походу, STM8. То есть, теоретически, можно и хоппинг и всё остальное сделать, при большом желании. Прошивка не сливается с СТМ-ки?
Уж прям застращали человека. Маааааааленький разъём внутри - это, скорее всего u.fl . Так и называется.
Вам надо купить пигтейл (pigtail) с u.fl на SMA (тип СМА-разъёма надо уточнить - с дыркой или со штырьком), достаточной длины. Подключить уфл в модуль вместо родного, протянуть кабель внутрь радио и закрепить СМА наверху аппы.
Вот типа такого (только один хвост)

В общем, прошить мне ESP не удалось - похоже, что флешка в модуле дохлая. Бут запускается, а пользовательская прошивка вешается.
Но в общем - подключаются ноги GPIO 0 (на -), GPIO 2(+), GPIO 15(-), CH_PD(+), TX-RX, Vcc, Gnd. После прошивки GPIO 0 с минуса снимается. Уровни не конвертил - не надо оно. Питал через внешний стаб на 3.3 вольта.
Опишу, как только сделаю =) Пока не получается, но я всё на соплях сделал, надо по-нормальному припаять провода и питалово не через свисток подвести
Спасибо! Я правильно понимаю, надо флешером прошить 3 бинарника по разным адресам в модуль, после этого он уже настраивается через веб-морду?
А можно вопрос по WiFi модулям?
Какая метОда подключения? Подключаете модуль с АТ-прошивкой или какой-то, кастомно прошитый? На компе - второй модуль, или, что логично, просто подключаетесь к создаваемой модулем вайфай точке?
Много будет такому моторчику 10-ых винтов. На 3S нормально, на 4S - уже перебор.
Хотя, сделайте стенд и замерьте ток. Может и всё ок будет.
рассчитанный на 3S мотор воткнуть 4S напряжение, он не сгорит?
А чего бы ему гореть? Тут просто дело такое: Предел по напряжению определяется лаком. А он выдерживает далеко за 300 вольт. Поэтому 12 или 15 вольт - абсолютно без разницы.
Другой вопрос, если вы возьмёте силовую установку, рассчитанную на 3S, и добавите банку - тогда движок будет работать с перегрузом и сгорит просто по перегреву. Если же вы увеличиваете обороты и при этом уменьшаете диаметр винта - не вижу проблем.
Я не гонюсь за фантомом 3, я хочу съесть таки этот кактус
А зря. Для своей силовой установки - это один из самых идеальных коптеров. Сложно сварганить что-то подобное самостоятельно. Но можно. Но дорого.
Пропы большеваты для этих моторов. Будет просадка на акке, особенно на мультистаре (я так понимаю, это тот, который 10С). У меня на 5000-ном Zippy compact просадка 0.2-0.3 вольта, а на мультистаре - 0.7. Это не гут. Так у меня пропы 9,5. А тут 11. Короче говоря, попробуйте винты поменьше, ecalc-у не верьте, он как-то странно тягу рассчитывает. В идеале - затестить силовую установку (сколько жрёт / сколько прёт), и на основе максимальной приемлемой производительности и рассчитывать вес, в который надо вогнать коптер. Мне кажется, что для ваших хотелок - коптер будет тяжеловат.
Дальше. Отдельный бек понадобится только если для каких-то камер и передатчиков. У назы свой бек аж на 3 ампера, на назу, приёмник этого хватит за глаза.
Можно, про почту уж?
Не валятся уведомления о появлении новых записей в дневнике. Точнее, валятся на почту (а я её проверяю редко), и ни в какую не отображаются в кабинете. Грустно.
Появилась, если что =)
винтик интересный вышел. а с весом как?
Эммм… Это точно пенолёт? Выглядит отлично! Огни очень в тему, ну и вообще - внешний вид на высоте.
Из Ардуины же, при использовании USB, выжимаются последние соки.
Глупость какая-то.
Какая разница последние или предпоследние соки выжимаются из ардуины? Работает и работает. Стабильно, к слову. Конвертерами моего изготовления пользуются несколько человек - ни у кого замечаний по “отвалу” конвертера не было.
Откуда, вообще, берётся это непонятное хейтерство к атмеге вообще и ардуинам в частности?
А теперь по делу. Наличие исходника - большой плюс. Потому как поменять что-то в коде хочется часто, а возможность есть не всегда. Поэтому - наличие ещё одного, альтернативного, варианта конвертера - несомненный плюс.
Какбе плагиат =)
![]()

Ну, во-первых - супер! И покраска и конструкция - на высоте.
А во-вторых - что это за локация? Какие-то крышки, подозрительно напоминающие ракетные шахты?
Работаю с черчением и моделированием достаточно плотно.
Стандарт де-факто для чертежей - dxf, dwg. Больше практически ничего не используют.
Под лазерную резку - в основном CDR (corel).
Стандарт де-факто для 3D моделей - STEP.
Для моделей, более ориентированных на 3D-печать - STL.
В принципе, то же, что и у skydiver-а:
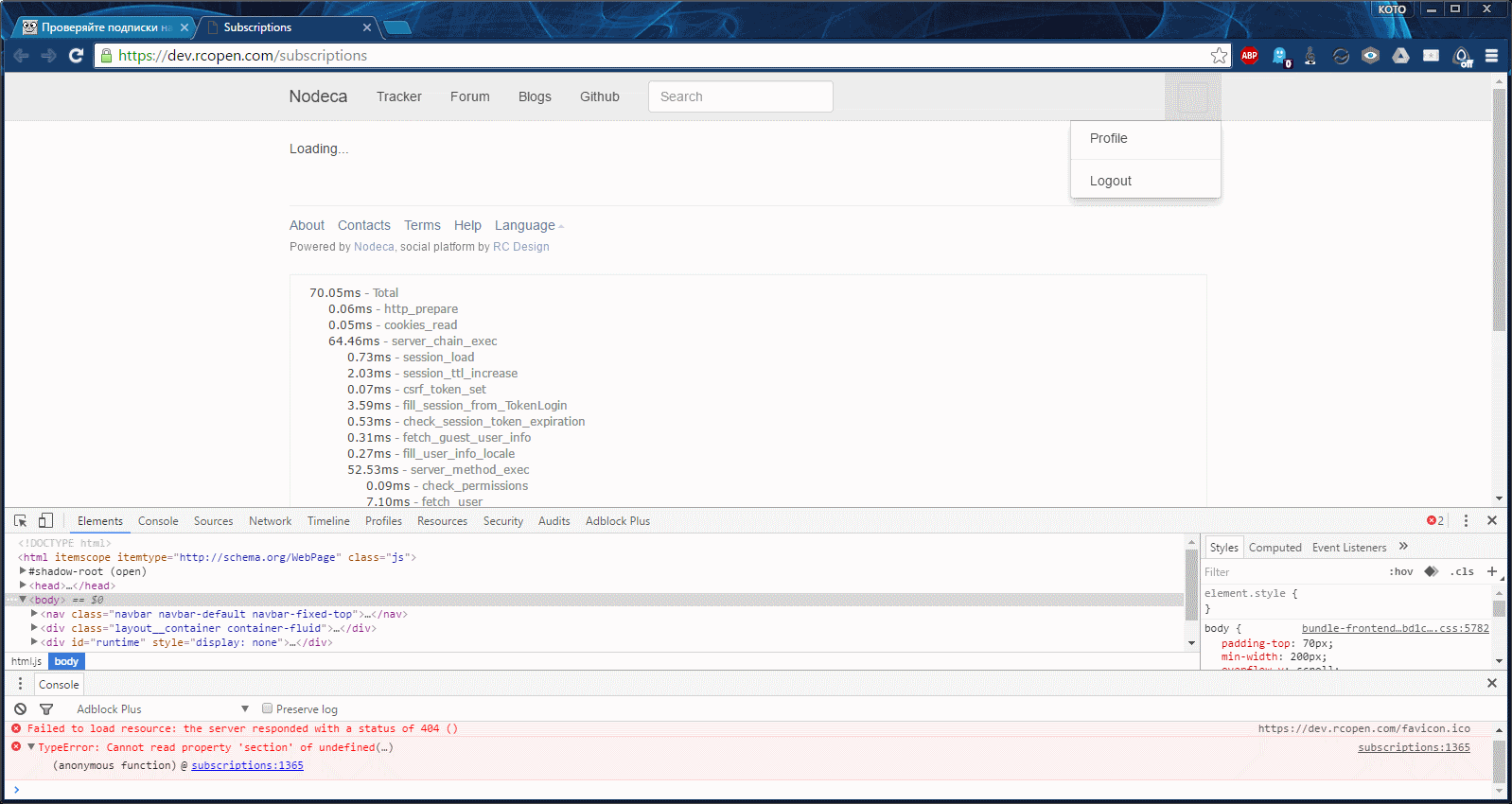
Chrome, W10Pro
Валерий, крутой труд! Поздравляю с выходом книги. Пробежался по предоставленному фрагменту (в сообщении Александра выше) - понравилось! Как по мне, для новичка многовато “воды” (ну там, принцип работы гироскопов-акселерометров) - но железо актуальное, никаких там куков и прочих мультивий про. Хороший такой FAQ. Относительно быстрого морального старения - ну да… Но книги по разному софту и операционным системам старятся ещё быстрее, что, тем не менее, не мешает их выпускать. Думаю, на волне популярности коптеров книга разойдётся. По крайней мере, надеюсь на это. Таких бы книжек в библиотеки…
Тема, открытая на скриншоте - прям агонь! Это реальная или так, для лулзов была сделана?
Обалдеть, tornado 7 из 11…
Нашей команде респект и успеха на соревнованиях!!!
Фейсбучный неплох. Только непонятно, зачем такой огромный подвал с таким маленьким количеством неинтересной инфы, типа “количество пользователей за последние полчаса”
Пока не заказали трафареты: “феникс” пишется как Phoenix =)
спеллчекер наше всё.
Нетривиальненько… Спасибо за мануал, сохранил ссылку на будущее!