Activity
На Авито вроде есть
Сначала нам надо догадаться какая у вас видео система. Цифра или аналог. 😃
Встретилась информация, что есть конфликт между OSD и черным ящиком. И надо отключить черный ящик
Можно попробовать установить inav. И посмотреть будет ли работать.
А вы уверены что эта высота с барометра, а не с gps? А если отключить gps то что показывает?
Если я правильно понимаю, также может быть проблема в том что в некоторых gps есть встроенный магнитометр и если подключить модуль к SDA/SCL то он конфликтует с барометром так как оба используют i2c интерфейс.
Когда устанавливали прошивку вы выбирали магнитометр в опциях?

betaflight.com/docs/wiki/guides/…/barometer
Здесь обсуждают похожую проблему
intofpv.com/t-no-baro-speedybee-f405-v3-with-gnss-…
У инава 7 как я понял есть проблема с пищанием при подключенном юсб. И команда BEEPER -ON_USB его не отключает как раньше было в старых версиях. Есть описание проблемы у разработчиков. Как видно она ещё открыта.
Если пищит когда подключена батарея то может быть может GPS не поймал спутники, или нет сигнала с приемника. Не откалиброван гироскоп. Можно командой beeper посмотреть, что включено, а что нет. Например на этой картинке видно что включено все за исключением usb. Стоит знак минус.

github.com/iNavFlight/inav/issues/10380
Нашел ещё описание проблемы что ecs не поддерживает 400 герц. Пишут что большинство esc моложе 8 лет должны работать. Если очень необходимо использовать старый esc то можно его подключить к серво выходу и в миксере установит это ’серво’ как
stabilized throttle
Но может быть проблема с безопасностью.
github.com/iNavFlight/inav/issues/9368
Да, можно. Но зачем ?!
Inav выдает 1000-2000. Мы подключим к нему esc откалиброванный на 1000-2000. Так для эксперимента.
Я все уже перепробовал 😦
Можно ещё поставить какой нибуть старый inav.
Место, где задал частоту 50 Гц:
Здесь synerflight.com/…/inav-outputs-tab/ написано что inav поддерживает следующие протоколы. Правда не понятно как выбрать нужную частоту. Относится ли переключатель который вы переключили только на серво или на esc тоже.
INAV support the following ESC protocols:
“standard” PWM with 50-400Hz update rate
OneShot125
OneShot42
Multishot
Brushed motors
DSHOT150, DSHOT300, DSHOT600
ESC protocol can be selected in Configurator. No special configuration is required.
А калибровка через ПК невозможна, так как ESC просто не видит сигнала от него
Теоретически можно выставить тестер на 2000, подать напряжение на регулятор, и установить тестер на 1000
А когда я дал максимальный газ, то импульсы стали ещё шире и почти налезали друг на друга.
это и есть PWM (Pulse-width modulation, широтно-импульсная модуляция) – способ подачи питания устройству с определёнными временными рамками, такими как пауза между сигналом и время подачи сигнала.
![]()
может надо откалибровать регулятор. Inav выдает сигнал 1000-2000, а сервотестеры 800-2200. и поэтому регулятор не может стартануть от полетника
А не была ли настроена дифференциальная тяга на старом полетнике? И при установке нового были перепутаны правый и левый мотор местами. Полетник пытается управлять по рулю поворота но уменьшает тягу не того мотора.
Может быть конфигуратор и прошивка полетника разной версии.
А этом видео похожие симптомы.
прошивку можно узнать командой в cli version , а потом установит старую версию и посмотреть работает ли там.
Я сейчас подумал, надо было держа самолет в руках с полуразряженой батареей дать полный газ. Повторится ли отключение мотора и будут ли пищать регуляторы как в первом полете.
BLHeli
маловероятно что можно настроить этот регулятор через этот конфигуратор.
Проблема в том, что в этой инструкции 8 настраиваемых параметров
первые хоть соответствуют инструкции? как они звучат? Нам нужна 4 строчка. Думаю можно даже поменять тип батареи на NIMH в 2 строчке и установить значение 0% в 4. тогда вообще отключится защита.
мне кажется по первой ссылке правильная инструкция. Она повторяет www.fmshobby.com/products/predator-esc-30a?_pos=2&…
однако инструкция которая открывается отдельным файлом не правильная. Она, похоже, от ESC Beatles 30A SBEC G2. ztwesc.com/…/ztw-beatles-g2-30a-2-4s-sbec-for-rc-r…

Странно. Может подпаяли не правильно?
А какой регулятор у вас установлен на самолете?
Я точно не знаю но , теоретически, можно попробовать сделать так:
- снять пропеллеры 😂
- Подключить полетник к компьютеру
- в inav на вкладке output передвинуть движок одного из мотора на максимум. Как будто тестируете мотор. Только надо, наверное протокол ESC выбрать PWM.
- подключите батарею к самолету.
Потом двигая этот движок как ручку газа программируйте . Если получится, конечно.
Отключите полностью эту защиту, если есть возможность. Больше будет шанс вернутся домой при разряде батареи. А какие регуляторы стоят?
Возможно при старте просело напряжение аккумулятора и у левого esc включилась защита аккумулятора от низкого разряда. В этом мануале есть описание такой проблемы:
Выходная мощность регулятора скорости (ESC) внезапно упала до 50% во время полета, двигатель продолжал пищать после завершения полета, но аккумулятор все еще был подключен к регулятору скорости.
издаёт такой звук
“BBB, BBB, BBB……”
решение
Замените батарею; снизьте напряжение отключения или отключите защиту LVC
У кого остался файл прошивки для T14SG. Версия прошивки V.8 C
вот нашел старые прошивки для T14SG
www.aste83.net/FUTABA/firmware/tx/14SG/
обходиться 25ю миливаттами
В описании радио написано:
ELRS LBT (Europe) Version is pre-installed with ExpressLRS CE EU domain LBT FW (Limited to 100mw power output)
radiomasterrc.com/…/boxer-radio-controller-m2?vari…
25 милливатт в Европе ,насколько я помню это для видео системы 5,8 гигагерц.
Со временем
Почитайте о том что нас ждет в будущем 😭
ПОСТАНОВЛЕНИЕ
от 30 ноября 2024 г. № 1701
МОСКВА
Об утверждении требований к оснащению пилотируемых воздушных судов и беспилотных авиационных систем оборудованием связи, навигации, наблюдения, автоматического предотвращения столкновений, к оснащению беспилотных авиационных систем оборудованием удаленной идентификации и оборудованием линий управления беспилотными авиационными системами и контроля беспилотных авиационных систем, средствами криптографической защиты информации, сертифицированными в соответствии с требованиями федерального органа исполнительной власти в области обеспечения безопасности, и Правил оснащения пилотируемых воздушных судов и беспилотных авиационных систем оборудованием, предусмотренным пунктом 1 статьи 783 Воздушного кодексаРоссийской Федераци
Это ограничение максимальной мощности. 90 процентов времени используется 25 или 100 милливатт. У приемника нет как таковой антенны. А видео передатчик имеет нормальную антенну и мощность 400 милливатт. Сильно влияет металический забор и крыша дома и гаража. Когда залетаю за них сразу требуется увеличенная мощность. Также я заметил что Packet rate влияет на дальность. Так что если используешь большую частоту то надо увеличить мощность. Я обычно летаю просто сидя на крыльце дома. Если встать и отойти пару метров то это сильно улучшает передачу.

Классические радио такие как Frsky ,Flysky, Futaba, Spectrum и тд предназначены для управления моделью в зоне прямой видимости. Летая фпв постоянно будете залетать за деревья, кусты, строения и связь будет пропадать. Это всем стало ясно лет 10 назад. Поэтому и появились так называемые long range системы. Такие как crossfire от tbs, ghost от immersionrc, r9 от Frsky и система на ELRS. Поэтому даже не думайте использовать первые для полетов на квадриках. Это потерянное время, выкинутые деньги и поврежденная психика 😄.
Я начинал летать на Futaba 6ex. Проблема была в том что не мог вывести на очки качество приема и не было телеметрии чтобы пульт предупреждал о проблемах с качеством приема. Но летал только на открытом поле. Потом купил себе Tango2 с crossfire от TBS. Это радио работает на 900 мгц и мощность у первых партий была 250 мвт. Но даже так работает отлично. Ни разу не было проблем со связью. Летая на нём ясно видно как падает качество приема залетая за дерево даже на расстоянии 100 метров. Особенно если дерево после дождя. Проблема с crossfire в том что система немного дороговата и антенны на 900 мгц большого размера.
Для обычных самолетов купил себе radiomaster tx12 с мультипротокольным модулем сс2500.
Потом, в связи с последними событиями, решил купить себе маленький вуп air65 от betafpv. Этот вуп имеет приемник ELRS приемник, соотвественно прикупил модуль RANGER ELRS 2.4 для радиомастера TX12. Работает тоже отлично. Единственная проблема что приемник на вупе не имеет нормальной антенны поэтому я поставил мощность в 500 мвт.
Так что самое простое для вас сейчас это купить радио с встроенным модулем ELRS. Или радио с мультипротокольным модулем и модуль ELRS отдельно.
Например radiomaster boxer
Интересное постановление правительства от 30 ноября 2024 г. № 1701.
government.ru/docs/all/156445/
- Беспилотные авиационные системы, включающие в себя беспилотные воздушные суда с максимальной взлетной массой от 0, 15 килограмма до 0, 25 килограмма, для выполнения визуальных полетов должны быть оснащены аппаратно-программными средствами, не позволяющими выполнять полеты в пределах элементов структуры воздушного пространства, в которых предусмотрены запреты или ограничения использования воздушного пространства.
- Беспилотные авиационные системы, включающие в себя беспилотные воздушные суда с максимальной взлетной массой от 0, 25 килограмма до 30 килограммов, для выполнения визуальных полетов наряду с оборудованием, предусмотренным пунктами 2 и 3 настоящего документа, должны быть оснащены:
а) аппаратно-программными средствами, не позволяющими выполнять полеты в пределах элементов структуры воздушного пространства, в которых предусмотрены запреты или ограничения использования воздушного пространства;
б) оборудованием удаленной идентификации, обеспечивающим формирование и передачу информации, содержащей опознавательный индекс, категорию такого воздушного судна, высоту его полета и координаты его местоположения;
в) системой экстренного прекращения полета, обеспечивающей принудительную посадку, или возврат беспилотного воздушного судна в точку вылета, или безопасное приземление беспилотного воздушного судна;
г) бортовыми огнями предотвращения столкновения (проблесковыми маяками) и аэронавигационными огнями, обеспечивающими световое излучение для идентификации такого воздушного судна;
д) оборудованием линий управления беспилотными авиационными системами и контроля беспилотных авиационных систем, обеспечивающим непрерывность обмена данными между станцией внешнего пилота и беспилотным воздушным судном на протяжении всего полета беспилотного воздушного судна (за исключением участков маршрута полета, по которому беспилотное воздушное судно выполняет полет в автономном режиме) и имеющим средства криптографической защиты информации, сертифицированные в соответствии с требованиями федерального органа исполнительной власти в области обеспечения безопасности. - Беспилотные авиационные системы, включающие в себя беспилотные воздушные суда с максимальной взлетной массой 0, 25 килограмма и более, для выполнения полетов за пределами прямой видимости наряду с оборудованием, предусмотренным пунктами 2 и 3 настоящего документа, должны быть оснащены:
а) аппаратно-программными средствами, не позволяющими выполнять полеты в пределах элементов структуры воздушного пространства, в которых предусмотрены запреты или ограничения использования воздушного пространства;
б) оборудованием радиовещательного автоматического зависимого наблюдения, обеспечивающим передачу информации в соответствии с приложением № 10 к Конвенции, или приемоответчиками, взаимодействующими с бортовыми датчиками воздушного судна, - для выполнения полетов в воздушном пространстве класса A или C в соответствии с Федеральными правилами использования воздушного пространства;
в) оборудованием удаленной идентификации, обеспечивающим формирование и передачу информации, содержащей опознавательный индекс, категорию данного воздушного судна, высоту его полета и координаты его местоположения, - для выполнения полетов за пределами контролируемого воздушного пространства в соответствии с Федеральными правилами использования воздушного пространства;
г) системой экстренного прекращения полета, обеспечивающей принудительную посадку, или возврат беспилотного воздушного судна в точку вылета, или безопасное приземление беспилотного воздушного судна;
д) бортовыми огнями предотвращения столкновения (проблесковыми маяками) и аэронавигационными огнями, обеспечивающими световое излучение для идентификации беспилотного воздушного судна;
е) оборудованием линий управления беспилотными авиационными системами и контроля беспилотных авиационных систем, обеспечивающим непрерывность обмена данными между станцией внешнего пилота и беспилотным воздушным судном на протяжении всего полета беспилотного воздушного судна (за исключением участков маршрута полета, по которому беспилотное воздушное судно выполняет полет в автономном режиме) и имеющим средства криптографической защиты информации, сертифицированные в соответствии с требованиями федерального органа исполнительной власти в области обеспечения безопасности.
С импелерами можно сделать. Тяги хватит. Но мне видится проблема этого аппарата в том, что для полета вперед ему нужно наклоняться вперед. Соответственно все эти крылья будут только мешать. А если добавить маршевый двигатель то нужны нормальные крылья что бы держать его в воздухе при отключенных подъемных.
22 года спустя 😂
Я спросил про видео потому что если используется dji система то у них встроен приемник с sbus в видео передатчик . И, соответсвенно, если подключить ещё какой-нибудь другой приёмник то работать не будет. В таком случае надо от dji отключить sbus проводок.
Честно говоря мне кажется лучший способ научится летать на квадрике это купить какой-нибуть whoop . Я себе в прошлом году взял betafpv air65. Freestyle версия и батарейками на 300mah. Летает просто отлично и легко управлять. Я на даче прям во дворе летаю. Уже полетов 100 сделал. Хотя у меня есть и 5 дюймовый с dji системой. И 3 дюймовый аналоговый. Но не хочется привлекать внимание 😃
Прошивку для Skyzone SKY03 убрали с официального сайта.
Здесь есть для SKY03O . Или это другая модель?
Мне кажется они все примерно одинаковые. Более менее известные бренды. У GEPRC все сделано на коннекторах. Меньше паять. У speкdybee можно с телефона настраивать.
А какая рама у вас? Влезут туда эти башни?
И какая видео система?
Я же могу паять ELRS под выходы TBS?
да можно припаять.
я такие настройки сделал для модели
Кстати у Вас на картинке есть как бы увеличенный вид с словами link ppm и link sbus. Это значит что в зависимости от типа приемника надо замкнуть между собой припоем два контакта. Думаю вам надо замкнуть два нижних.
Должны быть настроены Inputs, Mixes & Outputs
manual.edgetx.org/…/inputs-mixes-and-outputs
Если верит этой статье то у Вас в радио есть модель “Pocket”. С правильными настройками.
oscarliang.com/setup-radiomaster-pocket/#Model-Pro…
Приду домой -посмотрю как у меня настроено. Но вроде все просто.
Так надо и в передатчике модель настроить
если можно с конкретными цифрами,
These switch modes come in three flavors based on the number of output channels you would like and are only available on packet rates of 100Hz Full and 333Hz Full.
8ch - Channels 1 to 4 and Channels 6 to 9 are sent 10-bit, at the selected Packet Rate, along with Channel 5 (AUX1) in 1-bit (2-position) for Arming.
16ch Rate/2 - All the Channels are sent 10-bit but at half rate.
12ch Mixed - Channels 1 to 4 are sent 10-bit with Channel 5 (AUX1) in 1-bit (2-position) for Arming at the selected Packet Rate. Channels 6 to 13 are then sent at 10-bit but at half rate.
All of these 10-bit or 1024 positions are mapped to PWM 885us to 2115us (1 bit = 1.23046875us) in what is called “CRSF Extended Limits”
www.expresslrs.org/software/switch-config/#full-re…
Можно давить помехи мощностью, а можно придумывать протоколы помехозащиты )
У них было что то типа соревнования кто дальше улетит. 17 км на 10 миливатах вроде нормальный результат.
позанудствую немного 😄
Михаил, я понимаю Вашу приверженность ELRS
И где я это сказал? Последний совет был «Если позволяет бюджет можно просто купить FRSKY радио» 😃
с помехозащищенностью у него совсем никак, все поддерживаемые “мультипротоколы” уже очень давно морально устарели.
Там есть футабовский SFHSS. Устарел? Появился позже чем FASST на котором вы сейчас летаете.
мне важнее точность и скорость реакции.
У ELRS 1000hz pocket rate достаточно быстро.
А самое главное, не терять пакеты, это может быть фатально
Есть интересная технология Gemini
(аналогичная фрскаевской TD Dual Band Mode)
Почитайте
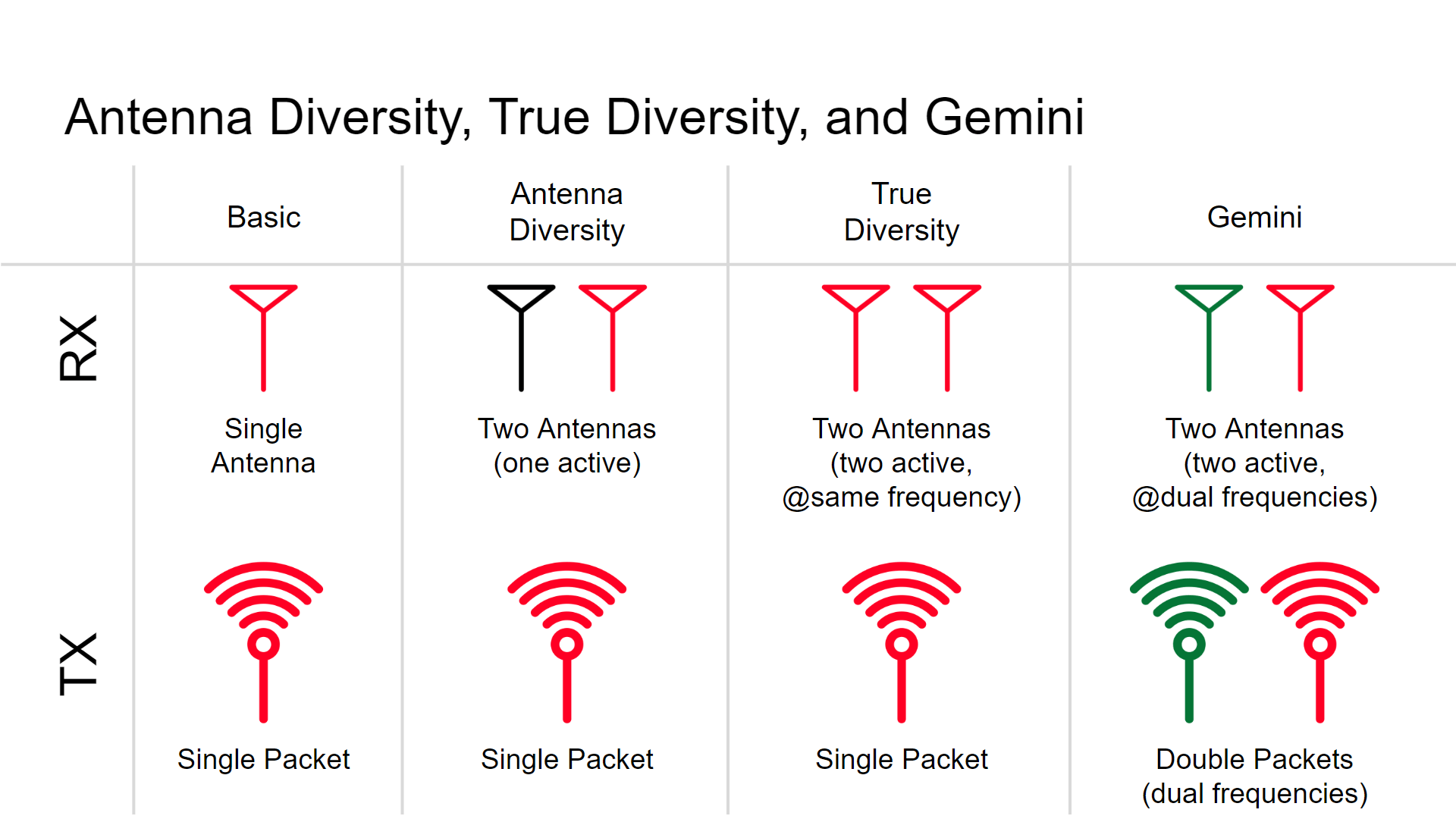
www.expresslrs.org/software/gemini/
И ВААПЧЕ прямо сейчас на Авито аттракцион небывалой щедрости
Futaba 14SG с тремя приемниками за жалких 10000 рублей ))
Там только один приемник с телеметрией. А вдруг захочется на втором самолете знать напряжение батареи? Какой порекомендуете в этом случае?
По вашему, для планера что лучше и почему?
Мультипротокольный модуль позволяет использовать множество приемников разных производителей. И немного сэкономить. Многим это важно. ELRS пока не так распространено.
Если позволяет бюджет можно просто купить FRSKY радио www.frsky-rc.com . Достаточно известный бренд.
если летать на планере то желательно иметь приемник с вариометром.
для Futaba с протоколом FASSTest это, например, приемник R7008SB (11815руб) правда его уже нет на сайте футабы или приемник R7208SB но он стоит 200 долларов и не продаётся на али . Плюс барометрический датчик SBS-02A (4872 руб)
для Futaba с протоколом T-FHSS это приемник R3008SB (6238 руб)с таким же датчиком.
если выбрать FRSKY или тот же Radiomaster с мультипротокольным модулем то есть приемники уже с встроенными барометрическими сенсорами. например Frsky ARCHER PLUS GR8 за 4790 руб.
если использовать радио с протоколом ELRS то можно использовать приемник Radiomaster ER8GV за 3770 рублей.
я бы сейчас взял Radiomaster TX16S Mark II. считаю оптимальным по соотношению цена качество. Только надо определится какой брать мультипротокольный или ELRS.
у меня есть FUTABA 14SG и Radiomaster TX12. Настраивал планер в обоих. EdgeTX (операционная система в Radiomaster) показалась более гибкая и логичная.
Пытаемся открыть БПЛА-секцию при институте.
я подумал вы хотите заниматься беспилотниками. ну там полеты с камерой, автономные полеты и тд. А оказывается просто авиамодельный кружок 😄
Вот например чертеж тренера. слева есть ссылка на скачивание чертежей в pdf и dxf форматах
rc-plans.com/catalog/item20.html
но лучше учится летать на самолете из EPP
Можно попробовать напечатать что нибудь из этих моделей. У их автора на ютубе есть канал Oliver FPV youtube.com/@olivier-c?si=6Am1woBBcI5dWWzH
ни кто не знает где раздобыть их чертежей
Здесь много разных чертежей есть:
outerzone.co.uk