Activity
Популярная в настоящее время прошивка BlHeli имеет дефолтные параметры, подходящие больше гочным квадрам, поэтому перед использованием блхели на больших коптерах многие меняют некоторые настройки через сюиту.
Среди прочих параметров в сюите можно прописать минимальный и максимальный газ, тем самым избавившись от процедуры калибровки. Это особенно удобно в случае с Назой, у которой режим калибровки регулей отсутствует в принципе.
TL;DR Ставьте PPM Min Throttle = 1120, PPM Max Throttle = 1920
Во время первого знакомства с Назой я заметил, что популярная калибровка регуляторов “через приемник” не описана ни в мануале, ни в каких-либо других документах от DJI.
Так подтвердились мои подозрения, что этот метод - не более, чем костыль, и что реальные значения, выдаваемые Назой, могут сильно отличаться от диапазона 1000 - 2000, поэтому указывать в сюите газ 1000 - 2000 я не торопился.
К тому же в мануале нашлась интересная табличка, в которой шим был сопоставлен процентам уровня газа:

Считаем:
1208 - 1144 = 64 мкс
11 - 3 = 8%
1% = 8 мкс
0% = 1144 - (8*3) = 1120
100% = 1120 + (8*100) = 1920
И получаем диапазон минимум-максимум равный 1120 - 1920 мкс.
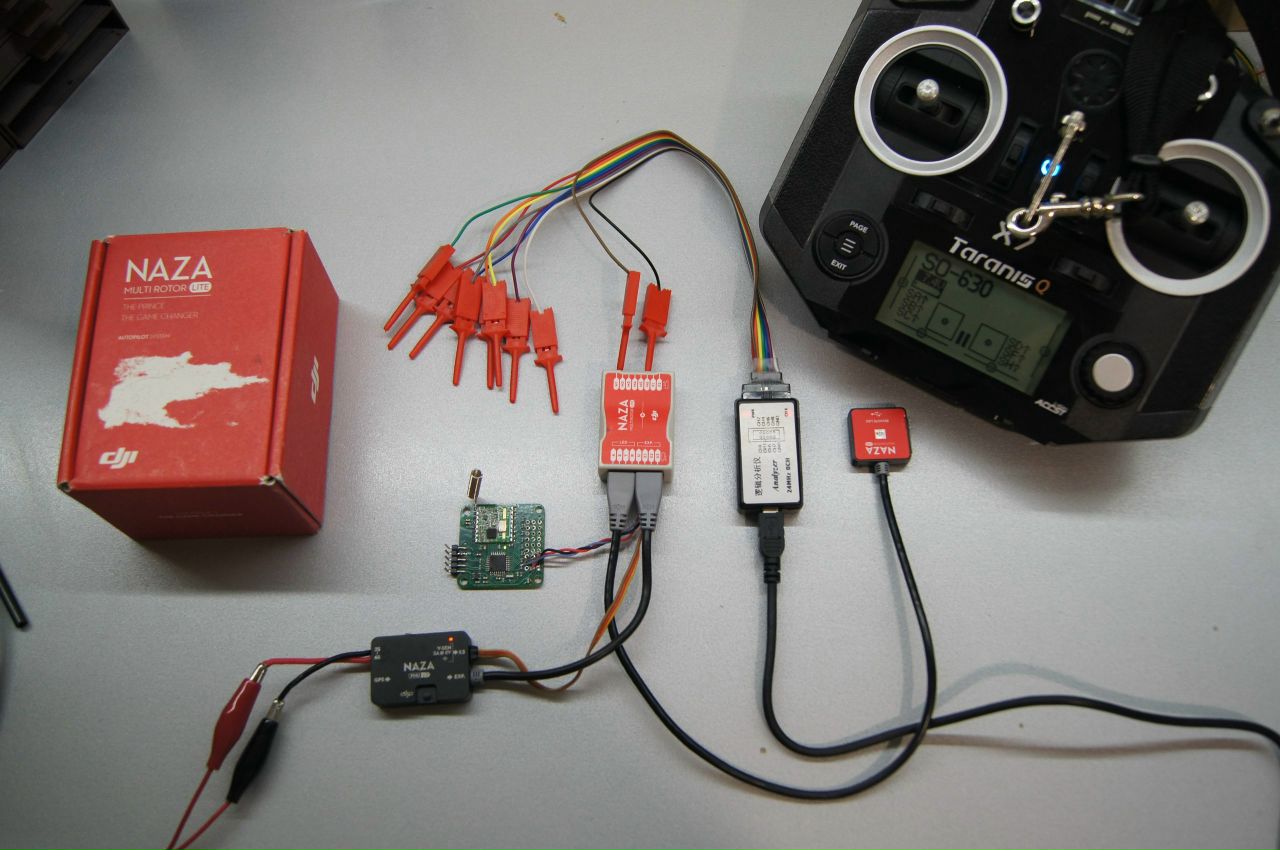
Когда я привёл эти расчеты и спросил, а откуда, собственно, взялся диапазон 1000 - 2000, меня назвали еретиком и предложили сжечь на костре. Поэтому я перешел к следующему этапу: нашел коробку с шитым лайтом и подцепил логический анализатор на выход М1. Результаты на скринах.
-
Питание подано, коптер не заармлен:
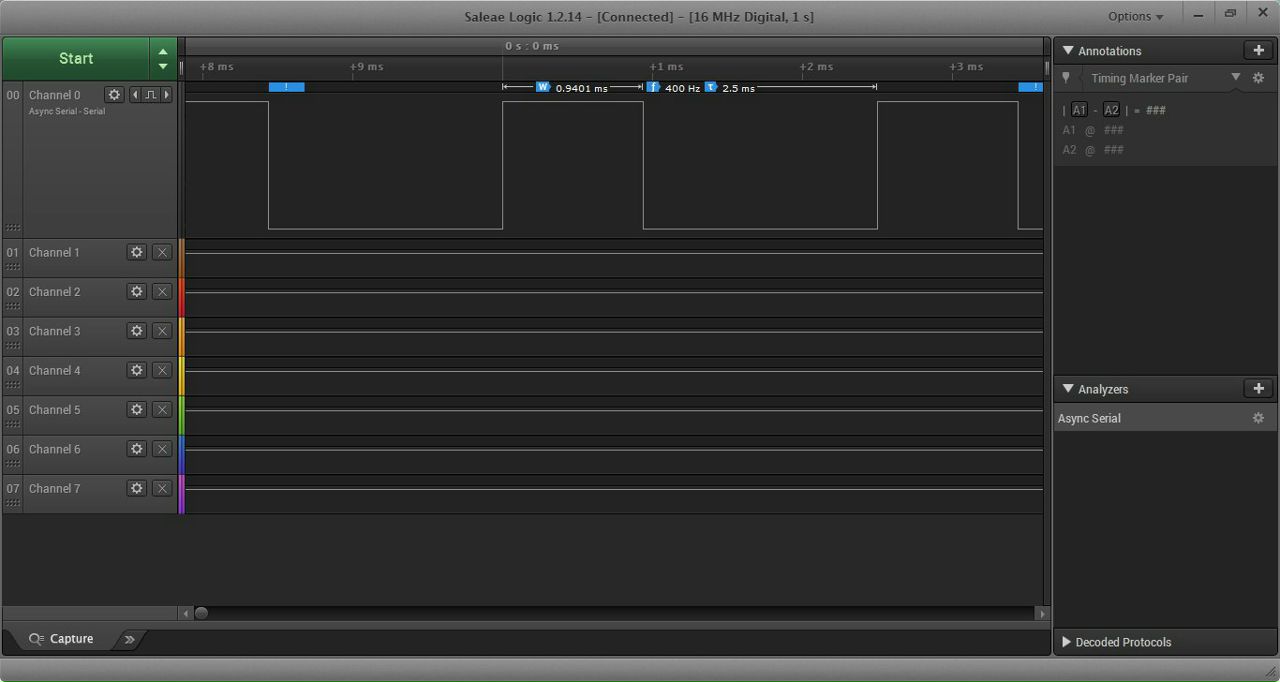
940 мкс, 400 Гц -
Коптер заармлен, моторы вращаются на холостом ходу (режим Intelligent), Idle Speed - Recommended:
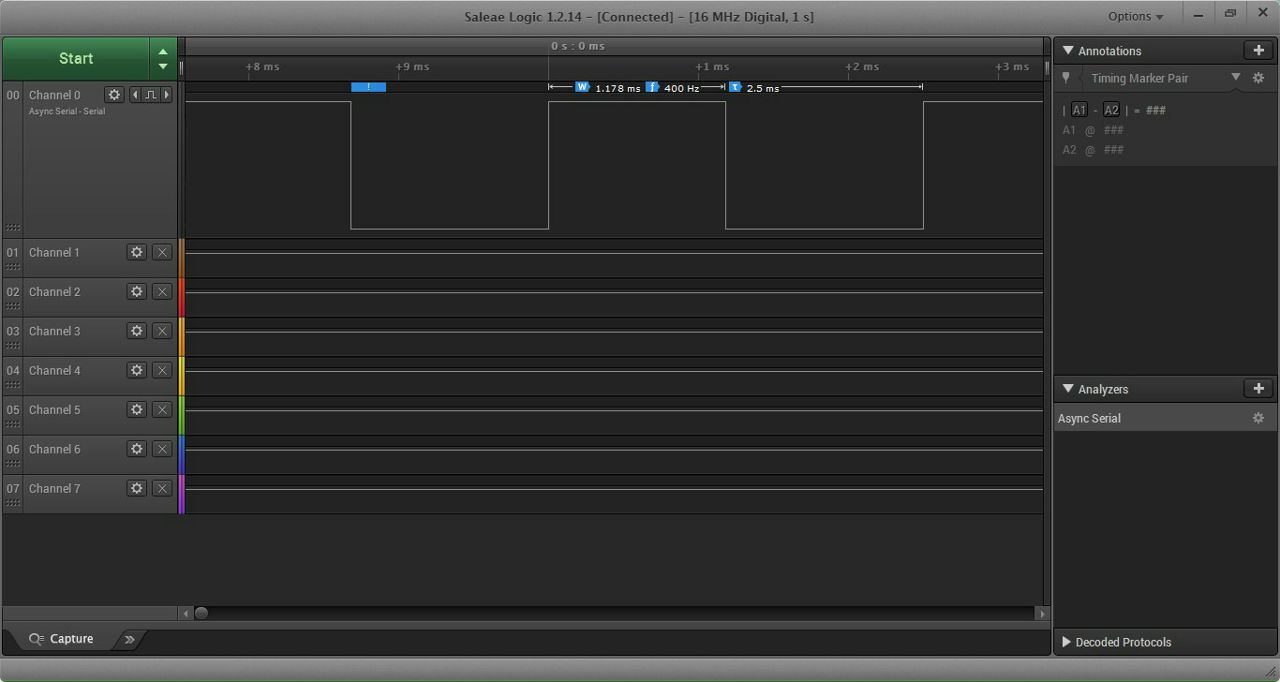
1178 мкс -
То же самое, но Idle Speed - Low:

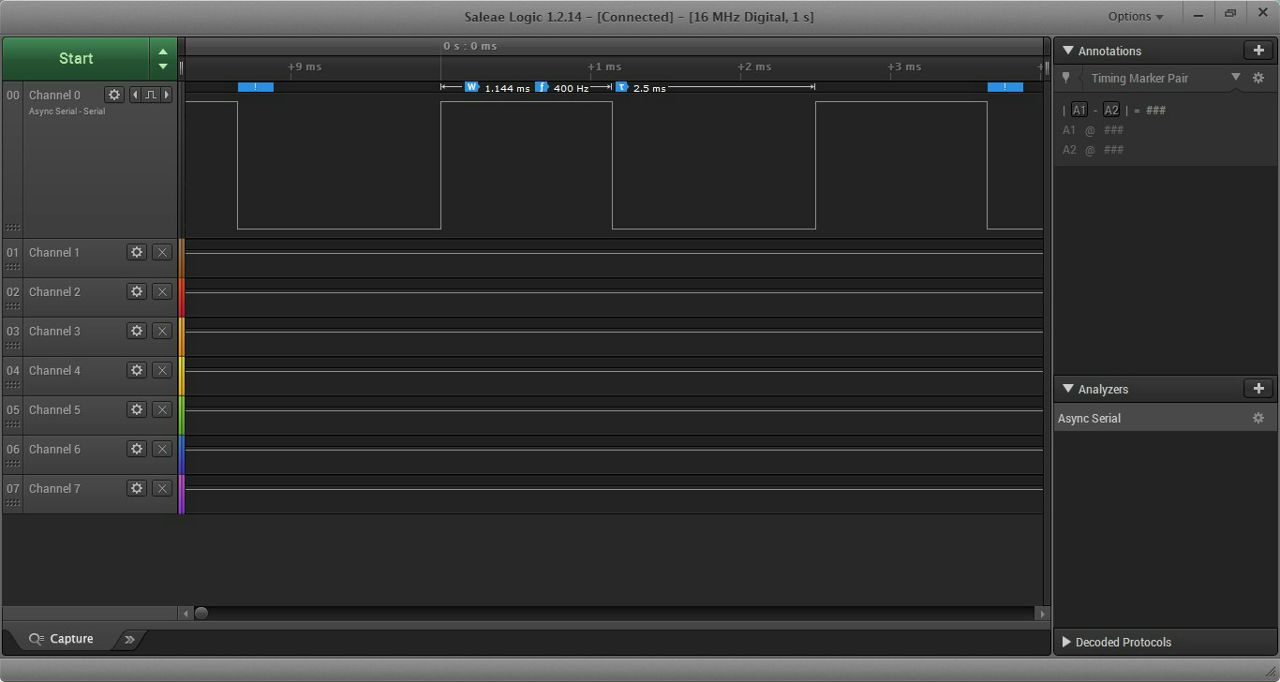
1144 мкс -
То же самое, но Idle Speed - High:
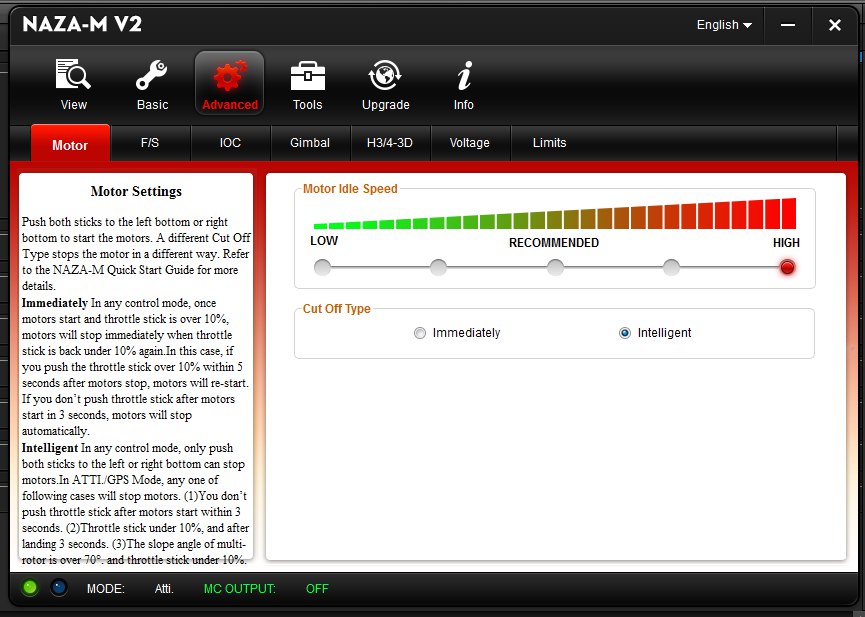
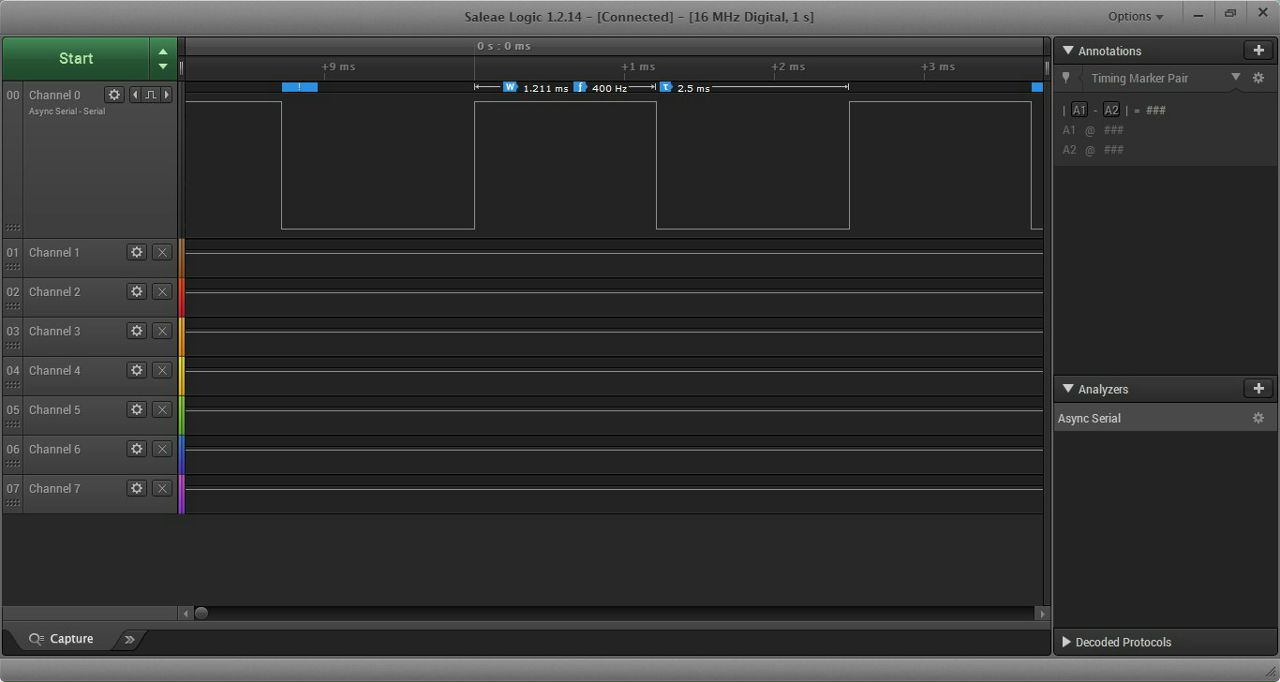
1211 мкс -
Максимальный газ (режим Atti):
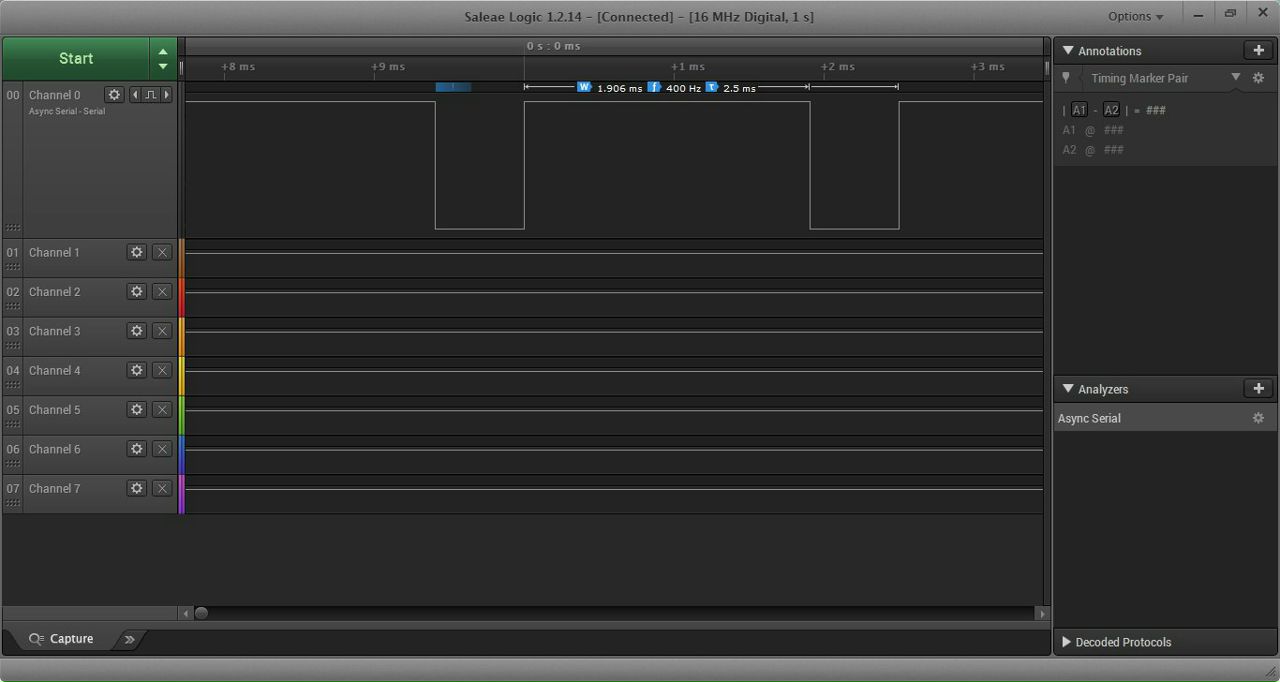
1906 мкс
Сам измерительный стенд:
Видно, что для холостого хода расхождение реальных значений с заявленными в мануале очень мало.
Макс. газ немного не дотягивает до 1920, в среднем он равен 1908 - 1910 (все измерения были проведены несколько раз).
Итоги:
- В сюите можно смело указывать уровни газа 1120 - 1920, никаких 2000 мкс Наза не выдает даже в режиме Manual.
- При калибровке через приемник моторы ни при каких условиях не выйдут на 100% газа, их потолок будет 91-92%. Мелочь, но неприятно.
- Некоторые ПК оставляют запас для стабилизации, т.е. вручную позволяют дать лишь 85-90% газа, а 95-100% полётник выдает только на нужные моторы при стабилизации по питч/ролл.
Наза к таковым не относится, ее алгоритм стабилизации позволяет выводить моторы на полный газ, а если возникает необходимость в компенсации или создании крена (на полном газу), она просаживает шим на нужных моторах. Скринить не стал, надеюсь поверите на слово.
UPD 02/09/17
При калибровке через приемник тоже можно попасть в нужный диапазон 1120 - 1920, если не хочется терять драгоценные 8% газа 😃
Для этого необходимо в меню аппаратуры сдвинуть конечные точки до диапазона 1120 - 1920 на том канале, который вы будете использовать для калибровки (например, на третьем).
Для тараниса это проще всего сделать через вкладку Outputs:
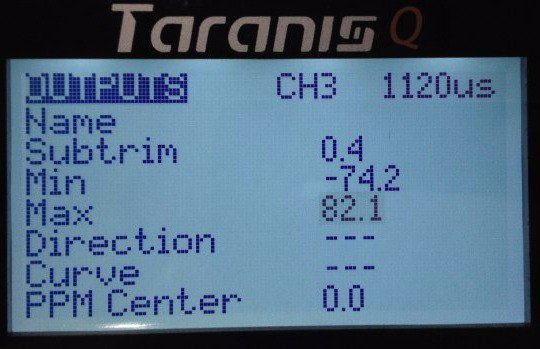
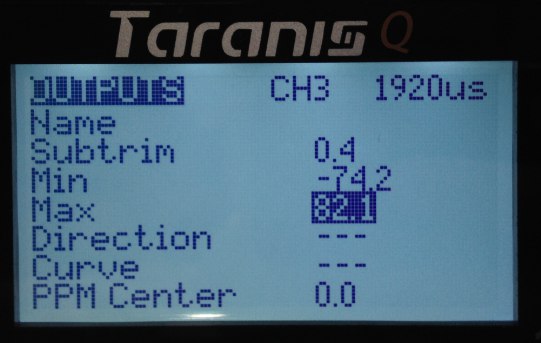
После чего можно откалиброваться под реальный диапазон 1120 - 1920 через 3 канал приемника.
Не забудьте вернуть эндпоинты к диапазону 1000 - 2000 после калибровки!
Оказавшись в “башне”, компас начал конфликтовать с находившимся там GPS-модулем.
Поскольку компас переносить было уже некуда, я стал искать место для переноса GPS.
В одном видео на ютьюбе я увидел довольно интересное решение, по сути копировавшее заводское расположение GPS-модуля на Фантомах:

И решил тоже сделать нечто подобное.
Для начала GPS-модуль был приклеен на 1 слой двустороннего скотча к куполу:

В качестве экрана было решено использовать пищевую алюминиевую фольгу по причине ее доступности.
Был вырезан кусок 100х120мм, который для повышения прочности был с 2 сторон оклеен широким металлизированным скотчем.
Перед оклейкой второй стороны я положил на фольгу зачищенный от изоляции многожильный провод, расположив его жилы веером для наилучшего контакта.
Паять было лень, но если кто-то собирается это делать - юзайте флюс Ф-64, алюминий им паяется шикарно.
Далее получившемуся “сэндвичу” была придана яйцевидная форма, повторяющая форму купола cx-20.

В завершение был нанесен слой тонкого двустороннего скотча для крепления всей этой порнографии к куполу.

Последний шаг - оклейка GPS-модуля получившимся экраном и, главное, пайка провода, идущего от экрана, к черному (общему) проводу GPS-модуля.
Если провод не припаять, экран не будет ничего экранировать.

На этом всё.
Для проверки получившейся конструкции я положил ее на работающий ЭЛТ-телевизор советских времен (уверен, фонит он неплохо) и подключил к U-Center’у:

Погодные условия во время теста:

Итог:
12 спутников
PDOP = 1.6
HDOP = 0.8
Разброс на DeviationMap около 2 метров.
(Скрин в высоком разрешении для недоверчивых - ЗДЕСЬ)
Чисто субъективно, в воздухе состояние GPS немного улучшилось: если раньше предельным числом спутников было 9-11, то сейчас коптер без проблем ловит 11-12 в безоблачную погоду. Хотя может это просто совпадение.
Но основной задачей я всё же считаю снижение вероятности сбоя GPS (или потери спутников) из-за наводок, и эта задача была выполнена.
Замечания / предложения / оскорбления / угрозы, как обычно, приветствуются.
АПДЕЙТ
Еще пара слов об экране.


Не буду настаивать на его пользе, но ни 13 спутников, ни тем более PDOPа 1.2 - 1.3 до экранирования у меня ни разу не было 😃
До недавнего времени заставить микроконтроллер (далее мк) измерять напряжение на акб можно было только одним способом - подпаивать резистивный делитель к 84 лапе мк.

Однако на моём коптере, заказанном 16.04.2015 на банггуде, стояла в очередной раз обновленная плата APM (по словам китайцев, “newest version with GPS antenna Antek BQ-V0”).
Из отличительных особенностей - GPS вынесен в башню, на плате с портами ввода-вывода 4 разъема вместо одного-двух (два 4-пиновых и два 5-пиновых).
Изменения коснулись и платы с “мозгами”:

Увидев нечто, похожее на резистивный делитель, я уже было подумал, что спустя год китайцам всё же удалось интегрировать эту сложнейшую схему на плату АПМ, но нет.

Дорожка оборвалась, перейдя на другую сторону платы.
Таким образом, чтобы сделать полноценный failsafe по питанию, достаточно припаять всего 1 провод от “плюса” акб к резистору R2 (отмечен на втором фото).
Масса у АПМ и силовой части общая, поэтому одного провода достаточно.
Конденсатор C1, насколько я понял, съедает переменную составляющую сигнала (ВЧ-помехи от моторов и ESC), облегчая жизнь атмеге.
Подпаиваемся к резистору

И фиксируем провод термоклеем

Затем последний шаг - подпаиваем провод к “плюсу” акб, удобнее всего это сделать на плате.

Остается лишь зайти в МП, активировать battery monitor и откалибровать его.
Процесс калибровки описывать не буду. Скажу только, что существуют 2 способа калибровки:
- Измерить фактическое напряжение, и вписать его в строку “Measured battery voltage”, МП сам высчитает коэффициент деления и фактическое напряжение сравняется с расчетным.
- Рассчитать коэфф. деления делителя по формуле k = (R1 + R2) / R2 и вписать его в строку Voltage divider.
В первом случае можно рассчитывать на более высокую точность, но я откалибровался вторым способом и получил погрешность порядка 0,02В или 0,15%, что меня вполне устраивает.
После успешной калибровки МП покажет такое же напряжение, как и подключенный к акб мультиметр:

На этом всё. Хочется верить, что платы, подобные моей, будут в скором времени ставиться на все банггудовские Чирсоны.
Замечания / предложения / оскорбления / угрозы приветствуются 😃