Activity
Сделал небольшой обзор на Китайский клон Original Prusa i3 MK3S от FYSETC 1th Store.
Скажу как владелец 3-х разных принтеров (Wanhao Duplicator i3 Plus, Anycubic Kossel linear plus и FlyingBear Ghost v3) PRUSA i3 MK3S просто БОМБА! По качеству печати сравниться с ним может только первый принтер (Wanhao Duplicator i3 Plus), остальные даже рядом не стояли (ИМХО).
Было похожее,когда компас умер.
Буду пробовать новый датчик. Больше ничего не остается.
Не могу понять, по одной оси дрейф. Хэдтрекер с RCgroup. Tilt и Roll отлично работают, а Pan (влево вправо) плывет. Пробовал в GUI гейны и фильтры крутить, ничего не помогает.
Никто с таким не сталкивался? Может плата с датчиками такая?
Emax 12A можно прошить OneShot125 ???
RapidESC
Это где такое?
Там только от 50Hz-490Hz
Сделайте поиск по теме по слову “OneShot”.
Нашел. И как я понял этот режим работает только на BLheli прошивках?
В OpenPilot’е Configuration -> Output появилась возможность выбирать частоту общения с мотором.
Какую частоту выбирать для Emax Simonk Series 12A?
И появился режим OneShot125, что это за режим?
Как сделать с Аурдины программатор ?
Имеется в виду что нужно сделать движение стиком в противоположном направлении чтобы коптер не улетел.
а гугл переводчик говорит
Счетчик настроить, чтобы остановить его от того, чтобы убежать
и как бы ядогадался, если бы Сергей не помог?
Сергей может и с остальной частью перевода поможете?
Народ а может сможем сделать правильный перевод этому гайду?
PID gains:
How to tune Kp - how to get fast corrective response:
- Set Ki for roll and pitch to 0.00300, put the responsiveness for rate mode response and max rate attitude to 300deg/sec for all
- Enable TxPID and put Kp roll and pitch on two sliders, set min. to 0.00100 and max. to 0.00500 - this pits the slider center to 0.00300
- Start flying LOS in rate mode (pitch and roll), make quick stick movements (start with pitch) and listen to how the controller stop when it has done the movement (counter adjust to stop it from getting away)
- If you you hear a quick double wrrh-wrrh, i.e. it overshoots/corrects, the rate is too high, lower and try again, the response should be precise with no sudden motor responses when it has hit the final position/angle
- Do the same for roll - on a H-quad the pitch rate is normally a little higher than the roll rate because of the weight distribution and delay in angular acceleration/momentum
How to tune Ki - how to keep the platform at an angle:
- After Kp is tuned, put Ki for roll and pitch on two sliders, set min. to 0.00100 and max. to 0.00700 - this pits the slider center to 0.00400
- Put the slider low to get a value of about 0.00100, start flying LOS in rate mode, and roll to the right at a fairly steep angle, see how it holds the angle - it will most certainly loose the angle and level out, or move in a swirling motion
- Adjust the value up and try again, increase until the angle is holding for a fairly long distance (10-20m) - no stick input should be necessary to keep the platform moving in that direction, other than throttle
- Do the same for pitch - the pitch value will also be a bit higher then roll
- With the final values set, re-test the Kp value by redoing the steps above
How to tune Kd - how to add a small amount of breaking to Kp:
- Add the Kd on two sliders, set min to 0.000000 and max. to 0.00090 - this puts the center at 0.00045
- Turn down the sliders to zero and start flying to get a feeling of how quick roll stick angle changes feels or looks in the goggles - should be very crisp and maybe a bit of overshoot/wiggle at the end of the correction
- Increase the roll slider and see how the breaking of the Kd dampens the end of the angle correction - Kp should have a diminishing effect and slow down as it approaches the set angle
- Keep the value low for good fast response and increase to add smoothness to video footage/goggles
Сижу пытаюсь перевести с помощью переводчика на человеко понятный русский, получается не очень…
Перевел первую часть…
Как настроить Kp - как получить быстрый корректирующие ответ:
- Установить значение Ki для roll и pitch 0,00300, поставить значения для Rate mode response и Max rate attitude 300deg/s
- Включить TxPID и назначить Kp roll and pitch на два ползунка, установить min. 0,00100 и max. 0,00500 - это края ползунков, центр получится 0,00300
- Начните летать в Rate mode (pitch and roll), сделайте быстрое движение стика (начните с pitch) и слушайте, как контроллер остановился, когда было сделано это движение (???)
- Если Вы слышите быстрый двойной wrrh-wrrh , т.е. проскакивает/исправляет, rate слишком высок, сделайте его меньше и попробуйте еще раз, ответ должен быть точным без резких моторных реакций, когда он попал в финальное положение/угол
- Сделайте то же самое для roll - на H-квадриках скорость тангажа является обычно немного выше, чем скорость крена, потому что распределения веса и задержки в угловом ускорении/импульса разные
PID просишь не дают
Прошил D8R-II Plus прошивкой D8R-XP. Вопрос - какие настройки надо выставить в меню настройки модели, что бы приемник мог отдавать CPPM? Как то так.
Перемычка на 3 и 4 канале стоит, все работает, но через некоторое время на приемнике загорается красный светодиод и все перестает работать.
как на раме ZMR250 ноги на лучи одевать?
Присоединяюсь к вопросу
Может кто разъяснение дать по режимам полета?
Manual - полностью ручной режим
Rate - как я понял, тоже что и manual
Attitude - удержание горизонта
а остальные что делают?
Axislock
WeackLeveling
Virtualbar
Rattitude
после установки на виброскотч все исправилось.
А что за скотч, ссылку можно?
Конструкция жестко закреплена, или на виброскотче?
Жестко. Буду эксперементировать…
Собираю мелкого на базе ZMR 250. Сделал Power Distribution Board под отверстия CC3D. Вот что получилось:





В архиве печатная плата в Sprint-Layout 6.0
Написал небольшой мануал по прошивке E-OSD.
А собственно где можно Назе32 купить?
Собственно прошил E-OSD, все получилось все работает. Кто-то здесь писал что у него не получилось… Сделал небольшую инструкцию.
На БГ появились DYS BE1806 2300KV Black Edition. $9.85

Залил файл .eep и все заработало!
И его пробовал заливать. Ничего не меняется.
И правда получилось! Неправильно открывал его в программе.
Продублирую здесь. Может кто поможет?!
После пере прошивки E-OSD этой прошивкой на экране вместо текста прямоугольники.
Там eep файл не просто так лежит
И его пробовал заливать. Ничего не меняется.
Кто говорит-то?
Нажимаю Checkout и ниже надпись
We can’t send to your country, please leave a message to us
Само собой адрес доставки заполнил и выбрал страну!
Халява, халява, скорее!
Говорят что не отправляют в Россию( Как у них можно купить?
Новый летающий кирпичик от ХК - Dart 250 Mini H Quad
Материал фанера 1 и 1.5 мм влагостойкая
Где нашли такую тонкую фанеру?
ВЕС так сильно греется
У меня есть один BEC 5V 5A с HK так вот он сам по себе уже 100мА кушает и тоже греется!
Нарезал из 1мм стеклотекстолита деталек на шлем по чертежам лунатика. Два дня пытаюсь их склеить, ничего не получается.
4 вида эпоксидки попробовал - склеивается плохо. С циакрином та же беда.
Может кто подскажет чем можно склеить стеклотекстолит?
какой контроллер лучше всего для мелкого , cc3d или naze32 ?
Как я понял из прочтенного в этой теме если хочешь ‘поставил и полетел’ то CC3D, а naze32 это уже для более продвинутых пользователей (придется поиграться с настройками).
CC3D вроде как самый распространенный вариант для квадров 250-го размера. Заказал такой на Aliexpress. Именно у этого продавца здесь уже заказывали!



Посидел пару дней почитал тему, набросал для себя табличку mini QUAD подборка комплектующих (внизу много вкладок).
Кстати на БГ появилась новая рама Diatone DIY FPV 29# V1 230mm Frame Kit, пока предзаказ.
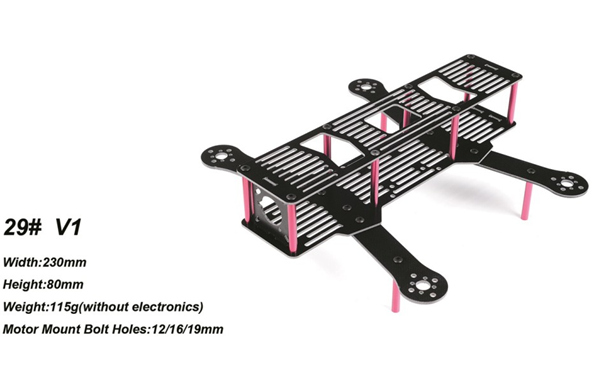
Обещают 115гр. веса.
Пробовал кто текстолит 1мм на лазере резать?
но что-то нигде не могу найти, что для этого нужно, какие переходники-провода
gopro fpv cable
или вот например
GoPro Hero 3 to FPV Transmitter Lead - 200mm
какое радиооборудование подойдет
В принципе любое, но как правило на коптерах используют видеолинк на 5.8Ghz.
Извините за офф, но почему никто на этом форуме не добавляет сообщения в начало темы? Что не страница так вопрос: где это взять и т.п.
Подскажите где можно приобрести алюминиевые винты М3, за рубежом и у нас?
Вот что получилось у меня