Activity
в инструкции копать. в приложении есть функция запуска калибровки. затем вращаете аппарат по осям. все.
аппарат нормально летает после небольших доработок. если не армится - смотрите соообщения в мишен планер. он напишет в чем проблема. Просто сейчас зима. а зимой мало кто летает это раз. спецоперация это два. на машине едешь и то жпс то есть то его нету.
в этом дроне вижу одно существенное неудобство. в том что надо подключаться к сети дрона или пульта. при этом смартфон всячески сопротивляется т.к. эта сеть без доступа в инет. И второй момент что потенциально кто то другой может подключиться к дрону или пульту. Кто нибудь пробовал перенастроить вайфай таким образом чтобы к примеру пульт подключался клиентом к сети смартфона с предустановленным паролем?
попробовать подключить к мишен планеру и посмотреть что выводится в сообщениях при загрузке, адекватность компаса, офсеты
например “угонщик” ставит себе энжойфлай и когда дрон пролетает мимо дает ему команду на посадку. подключается с ноута mission planner к UDP порту телеметрии и посылает команду дизарм изменение параметров итд
У меня такой вопрос по теме коптер и пульт версии 1км используют открытую сеть без пароля. Выходит что если кто то подключится во время полета по вайфай к дрону то может угнать коптер? нет ли способа задать пароль для сети?
по моему у всех пульт по таймауту вырубается если нет соединения с коптером и нет шевеления стиками. и кстати коптер тоже
экран компасу как козе баян. ему мешают наводки от силовых проводов. обе пары проводов что идут к разьемам в центре свить в плотные витые пары а затем перекалибровать компас. если не калибруется изза большого магнитного смещения - можно размагнитить его окружение прибором для размагничивания. если вадает ошибку в мишен планере что компаса нет то значит когда переносили нарушили кабель
не включайте питание без антенн. передатчик мощный может погореть выходной каскад без подключенной согласованой антенны
да. все верно.
упала мощность передатчика по причине неисправности / обрыв или повреждение антенны / помехи в зоне полетов. из того что можно сделать самому попробовать другое место для полетов и проверить целостность антенн
красно-черные
чтобы не унитазило надо скрутить проводки которые приходят по центру платы в плотную витую пару и заново откалибровать компас
проблема видимо в том чем прошил, насколько я понимаю разработчик не предоставляет прошивки, собственная прошивка модифицированная и в свободном доступе не предоставляется
полетный контроллер собственной разработки, программное обеспечение адаптированный arducopter
чем сохраняете и куда. если модуль юблокс, а сохраняете в епром - проверьте есть ли дополнительная микросхема памяти на модуле. если нет то и сохраниить настройку в епром не получится
Всем добрый вечер. Может кто подскажет куда копать, при включении коптера индикатор мигает синим, а потом загорается розовым (не красным), тест камеры проходит, с приложением конектится, но моторы не запускаются. Буду благодарен за совет.
попробовать подключить по юсб к mission planer, заглянуть во вкладку messages возможно что то напишет
вайфай не экранировал, незачем это, там вч помехи они компасу не страшны.
мои доработки:
проводки питания что слева и справа от компаса свил в плотные витые пары вблизи к штеккерам, там они близко к компасу и могут создавать постоянное магнитное поле изза потребления нагрузки.
снял крышку барометра и положил туда битопласта кусочек (негниющий дышащий поролон) там даже ниша под поролон есть а почему не положили непонятно.
пид параметры уже неплохие, но перед передачей в массы еще немного пошаманю, понаблюдаю
вчера был короткий тестовый подлет после физических доработок, вцелом доволен, по яву не уводит, синим не мигает, высоту стал держать сильно лучше.
ps
что то не нравятся мне родные пропы, чуть что норовят выскочить штифты, да и сами лопасти скалываются при первой возможности. Есть ли совместимое что нибудь? может от мавик мини или фими мини не подойдут?
Всем привет.
в прошлые выходные мне пришел разъемчик для переходника юсб, удалось нормально подключиться к мишен планеру и поэксперементировать с пидами.
в принципе что хотел сделал настроил остроту реакции на стики почти как на гоночном дроне, большие углы отклонения. но есть некоторые нюансы.
особенность 1. параметр Angle max позволяет увеличивать максимальные углы чтобы увеличить скорость дрона, но в имеющихся режимах заданный в параметре угол будет работать только свыше 3м по высоте, ближе к земле углы ограничиваются в прошивке, в ходе подбора пидов взлетал невысоко и ломал голову почему не работает angle max
особенность 2. если разрешить максимальные угловые скорости по ролу и питчу то при настроенных пидах коптер очень отзывчив на ручку управления и даже повторяет дрожание оттянутого и брошенного стика, но на самом максимуме подвес камеры уже не успевает отрабатывать стабилизацию при резких маневрах.
особенность 3 и даже некоторая тайна. при первом же отклонении коптера на 45 градусов он выключился и свалился, к счастью без повреждений. судя по логу как только угол коптера достиг 45 градусов он отключил моторы и через пару секунд отрубил питание. Поэтому в последующих экспериментах я понизил максимально допустимый угол до 30 градусов.
собственно по пункту 3 вопрос: наблюдал ли кто нибудь подобные отключения питания в полете?
это какие пиды?
В алтитуде моде все отлично
за исполнение заданного стиками или системой навигации угла в ардукоптере во всех режимах за исключением ACRO отвечают пиды ATT_ …
если коптер переворачивается никакие - пиды гпс режима тут непричем.
пиды стабилизации должны обеспечивать невыход наклонов за пределы angle_max что по дефолту для ex4 20 градусов.
пиды навигации до того как вы настроите стабилизацию трогать вообще нелогично.
ваш малыш еще не пополз а вы ему норматив по бегу ставите.
никаких качков свыше установленных 20 градусов быть не должно.
пиды стабилизации должны работать четко и жестко.
например коптер висит в альтитуде, на высоте в пределах человеческого роста. поднимаем его за ногу одного луча - при этом при правильно настроенных atc пидах он должен просто подняться весь, сохраняя горизонтальное положение, не допуская крена ни на градус.
я делал тесты в прошлые выходные. поднял фильтры с 40 до 100 и стал поднимать рэйт P пиды, но даже при коэфициентах вдвое больших изначального присутствует вялость, надо добавлять еще.
но на большее мне не хватило терпения, через вайфай коптер постоянно вырубается, мишен планер конект отваливается, надо через юсб соединиться и нормально настраивать. на этой неделе пришли разъемы, если позволит погода в выходные продолжу
с дефолтными пидами этот летающий фотоаппарат совсем не для полетов в ветер, об этом честно сказано в инструкции.
у него максимальный угол всего 20 градусов, он специально задуман и реализован для съемки в штиль.
компас калибруют в два приема после нажатия кнопки калибровки в приложении нужно медленно и плавно его провернуть вокруг себя соблюдая горизонтальное положение рамы, получив сообщение что пора вторую ось - нужно поднять его строго носом вверх также медленно и плавно провернуть вокруг этой оси так чтобы нос всегда оставался сверху.
после калибровки компаса нужно перевключить дрон.
для безопасного полета чтобы в экстренной ситуации можно было воспользоваться автовозвратом нужно дождаться точного фикса по жпс, на дроне при этом перестает мигать зеленый статус и начинает светиться зеленым непрерывно.
Взлетать наиболее безопасно в режиме альтитуде - горит красный и зеленый на пульте.
взлететь можно автовзлетом и сразу добавить немного высоты ручкой газа.
Одна из фишек ардупилота в том что пролетев по прямой метров 10 вперед назад без поворотов система ориентации устраняет ошибки и неточности компаса,
после этого можно перейти в режим работы по спутникам - это два зеленых на пульте и position в приложении.
При полетах в удержании по спутникам в случае если вы видите что аппарат начинает нарезать круги по спирали нужно вернуться в режим альтитуд, бороться с утитазингом за счет управления стиками нецелесообразно. При посадке с высокой горизонтальной скоростью можно сломать ногу.
посадку удобно делать кнопкой автопосадки в режиме altitude - спустите аппарат до 1-3 метров и зажмите автопосадку на 3 сек. аппарат сам снизится и обнаружив касание земли автоматически выключит моторы
сине-зеленое перемигивание указывает на несоответствие данных гироскопов и компаса.
автопилот считает что компас не здоров )
такое бывает когда
- компас неверно откалиброван
- силовые провода создают помеху работе компаса
- металл или руда вблизи места полетов (батарея отопления если вы дома тестите или например вы живете в каком нибудь магнитогорске итд)
из существенного у вас в пидах занижен пропорциональный коэффициент скорости выравнивания по питчу
ATC_RAT_PIT_P дефолтный 0,06 у вас 0,04
компасмот не может так влиять, он вообще влияет только адекватность компаса, если в полете у вас не появляется сине-зеленый перемигивающийся сигнал значит с компасом все в порядке
дефолтные параметры с нового дрона sites.google.com/site/…/EX4Default.param?attredire…
сравнить можно через программу mission planner в секции полного списка параметров есть кнопка compare
или открываете рядом два текстовых редактора
в вашем случае особое внимание к параметрам wpnav phld
PHLD_BRAKE_ANGLE,2000
PHLD_BRAKE_RATE,8
WPNAV_ACCEL,100
WPNAV_ACCEL_Z,100
WPNAV_LOIT_JERK,1000
WPNAV_LOIT_MAXA,250
WPNAV_LOIT_MINA,15
WPNAV_LOIT_SPEED,500
WPNAV_RADIUS,200
WPNAV_SPEED,700
WPNAV_YYZ_BKE_KP,0.85
или скачайте параметры со своего дрона в файл и опубликуйте, я посмотрю.
скрины не о чем. нужен именно файл параметров выгружаемый программой mission planner
Ну да только в режиме GPS такое поведение, Спутников если меньше 12 не взлетаю, обычно 18 и больше.
Ощутимой вибрации нет ни на одном из моторов, даже с винтами.А вот про пиды навигации можно подробнее, что это и где?
секция WPNAV на вашем скрине и в полном списке параметров.
если есть возможность подключиться через разьем под батарей к мишен планнер сохраните файл параметров, затем можно будет сравнить ваши параметры с файлом с нового коптера и тем самым выявить что вы накрутили
сегодня впервые полетал на этом аппарате, пока настройки не трогал и внутрь не лез. настроил по инструкции компас и левел.
конечно не гоночный дрон но со своими функциями справляется. в дачных дворах около 7 спутников на старте, в поле видел до 14 но ждать каждый раз надо минуты две-три. не очень удобно.
камера днем -просто бомба, подвес мегасупер. полетное время вполне для такого малыша.
прост в управлении, мой 8 летний сын никогда раньше не управлявший дроном вполне справляется.
очень удобная кнопка взлета и посадки, очень хорошо что сразу после касания земли выключает моторы
минусы немного корявенькое приложение, но привыкнуть можно.
маловат максимальный угол - низковата скорость, в сильный и даже умеренный ветер унесет, но об этом честно сказано в инструкции.
У кого есть какие советы? А еще лучше бы скрин PID настроек коптера
тут дело не в пидах
похоже жпс дурит. сколько спутников при таком поведении? пиды навигации не крутили?
проверьте вибрации на моторах они могут негативно влиять на здоровье инерциалки и состояние жпс.
возможно падали и погнули ось мотора или дизбаланс
при включенном моторе держите рукой снизу и сравните нет ли “зуда” под одним из моторов
stabilize roll P stabilize pitch P в значениях 18-20 и приводит к тому что управление аппаратом очень грубое.
для типовых прошивок ардукоптера дефолтное значение 4.5
в оригинальном программном коде 4.5 это 4500 сантиградусов управления,
раньше была такая схема управления, может конечно поменялсь что
автопилот(навигация) или стики в зависимости от режима “задают” целевой угол по ролу и питчу, этот угол задается в виде команды, диапазон значений от -4500 до +4500 а затем “программный модуль контроллер стабилизации” используя рэйт пиды пытается регулируя газ моторов достичь заданного угла.
так вот максимальные отклонения стиков при значении стаб пидов 4,5 скалируются в диапазоне -4500 до +4500
если пид сделать вдвое большим то при половинном отклонении стиков достигается максимум команды в 4500 единиц и дальше идет мертвая зона.
затем по мере развития прошивки ардукоптера решили максимальный угол доступный для управления в 45 градусов подходит не для всех моделей, у кого нехватает тяги тому нужны меньшие лимиты, для спортивных дронов можно и 60 разрешить. и лимит сделали регулируемым через параметры ANGLE_MAX и его типовое значение 4500
по сути большие значения стаб P делают управление грубым, почти дискретным.
чтобы решить проблему нужно фильтры на 100, убавить пошагово (чтобы не разбить коптер) стаб P до 4,5 увеличивая при этом рэйт пиды P и D
это касается только рола и питча, яв и пиды удержания высоты трогать не надо
по общепринятой практике обычно пиды регулируют пошагово не изменяя значение более чем на 20% за один раз.
все верно, по мере изменения фильтра и другие пиды надо постепенно возвращать к дефолту типовой ардукоптер прошивки.
вот примерные пиды 250 ардукоптера времен ардукоптер 3.6 sites.google.com/…/ac36_250frame_alien.param?attre…
что примечательно фидфорвард составляющие нужны обычно для моделей которым трудно преодолеть собственный цт, например традиционным вертолетам и обычно atc_ …_ff у мультироторов
занулены.
прошивка позволяет каким то образом отключить альтхолд чтоб полетать в stabilize? “altitude” не самый лучший режим для настройки пидов так как он постоянно подруливает желая удержать позицию по сенсорам
Были в этой теме фото вскрытия штатного модуля GPS - ионистор там есть под экраном
ссылка rcopen.com/forum/f135/topic549678/20 и пост 22
вот тут человек пишет что нет ионистора, к сожалению фото неразборчивы
Всем привет, стал обладателем сего чуда. повелся на распродажную цену в 7700р за комплект с 3 батареями и контроллере основанном на ардупайлоте.
спасибо за интересную тему,
пока еще не выбирался на полеты. Подключился через родное приложение, откалибровал компас, акселерометры, подключился qgroundcontrol по вайфай, проверил фактическую ориентацию, стороны света примерно на своих местах.
Дома жпс не ловит и что бесит от батареи все время норовит выключится не давая поковыряться в настройках.
К сожалению аналогично qgroundcontrol через udp к mission planner так и не получилось подключиться,чтобы подключиться через юсб заказал разьемчики, но пока они придут…
вопросы пока такие 1. получалось ли у кого подключиться миссион планером по udp?
2. как оперативно отключить моторы в случае неудачного взлета? летать буду на поле с высокой травой.
3. аппарат новый, настройки не менял оба стика подпружинены газ слева по умолчанию?
некоторые комменты по обсуждению
если в покое компас работает нормально но в полете уходит это значит что силовые поля от проводников питающих регули создают постоянное магнитное поле, лучший способ переместить компас как можно выше и дальше от точки возникновения. Экранирование малоэффективно т.к. вч помеха роли не играет а постоянные поля не экранируются.
В ардупилоте 3.4 чтобы снизить кривость компаса перед переходом в гпс режим желательно пролететь пару раз метров 10-15 туда сюда про ПРЯМОЙ
по жпс вариант без ионистора это +минута на старте, полюбому надо как минимум ионистор ставить. в ардупилоте современных версий в ходе инициализации используется юблокс протокол с баудом 115200 при этом минимизируется время доставки данных, уменьшается задержка являющаяся причиной унитазинга, поэтому если будете конфигурировать стороний модуль через ю-центр то бауд 115200 предпочтительнее.
обратил внимание что со стока стоят неподходящие для размеров аппарата фильтры в группе ATC по ролу и питчу, заданы фильтры в 40 гц, при этом на таких малышках очень трудно настроить пиды и предотвратить раскачку. нужно повышать фильтры с 40 до 100.
Спасибо за инфу что регули поддерживают дшот, для маленьких аппаратов это весьма полезно
Здравия всем, пилоты!
Обращаюсь за помощью!
Имеется GPS-модуль u-blox 8 с заводского дрона, имеется u-cener v.19.2.
Имеется программатор usb to ttl и установлены драйвера.
U-CENTER видит модуль и работает с ним.
Необходимо вытащить ДАМП конфигурации с этого модуля.
Подскажите пожалуйста, как это сделать?
Tools -> GNSS Configuration GNSS >> File сохранение конфигурации в файл
Tools -> GNSS Configuration File >> GNSS записывает конфигурацию из файла в приемник
Но вот сделать запрос на добавление этого изменения в релиз, головы и знаний английского, не хватает…
помимо технической части при внесении подобных изменений вот что еще понадобится
1 убедить “модераторов проекта” в том что ваши изменения важны нужны
2 убедить что внесенные изменения работают и не приводят к глюкам
3 создать новую документацию по подключению для пользователей
4 организовать техническую поддержку пользователей
мне чтобы пофиксить багу с делителем на аналоговом пине пришлось потратить недели две на то чтобы убедить по пункту 1
в подобной ситуации проще форкнуть в свой репозиторий (сделать копию проекта в собственном экаунте сервиса github), к нему сделать доку по подключению, собрать бинарник актуальной версии и на этом всем спасибо - пользуйтесь как есть
Куда копать?
нужно настроить чтобы висело в центральном положении стика, тогда переход между альтхолд и стаб не будет столь резким
ardupilot.org/copter/docs/ac_throttlemid.html
Может подскажете дебаггер для чибиос?
могу подсказать где могут подсказать
gitter.im/ArduPilot/ChibiOS
DJI Naza образца 2014 года за 30 минут решит ваши проблемы 2019 года )))
простите за помидор, но шутка старая и несмешная
самому скомпилировать в мастере даже ссылку на строчки дали, а я этого пока не умею вот жду.
для сборки надо убунту ставить либо под вин10 либо как отдельную ос, либо в виртуалке. а потом еще ставить и обновлять утилиты, репозиторий, субмодули
полюбому на моем старом компе это целый вечер мороки, поэтому сейчас не возьмусь…
жду с китая новую мать+проц+память+м2диск
ориентировочно к концу январских каникул прибудет.
тогда скинете мне ссылки и под какой таргет я вам соберу, а заодно проверю скорость компа
если же захотите самостоятельно годные варианты
это под виндой 10
ardupilot.org/…/building-setup-windows10.html
это с убунтой
Есть датчики с уже установленным транслятором, однако они дороже и не всегда при выборе можно понять есть он там или нет.
а зачем транслятор? вроде как все шины i2c stm32f427 толеранты к 5v сигналу
www.st.com/resource/en/datasheet/dm00071990.pdf даташит, страница 53
“FT” означает 5 V tolerant I/O
ну и дальше поиском по таблице по слову “I2C” в первом столбце стопиновый корпус
в случае если случаются перевороты нужно проверить соответствует ли порядок подключения моторов выбранному типу рамы
как правильно тут ardupilot.org/…/connect-escs-and-motors.html#conne…
дополнительно можно снять винты и выполнить тест порядка включения моторов при правильном порядке если смотреть на раму как на циферблат они будут включаться по очереди по часовой стрелке
проверьте что все моторы стоят четко соосно, что нет наклонов осей моторов влево-вправо
до тестов автоматических режимов втч лоитера нужно обеспечить идеальную работу в режиме стабилизации.
любые воздействия стиками втч до упора не должны приводить к переворотам, коптер должен четко без раскачки и остаточных качков четко повторять управление со стика, ограничиваясь отклонением в 45 градусов по ролу и питчу, повороты по яву не должны приводить к потере горизонтальной стабилизации.
только после того как вышеуказанное достигнуто можно начинать пробовать лоитер и автоматические режимы.
при использовании внешнего компаса с апм нужно установить настройку рол180 (но в случае с 32 битными контроллерами этого делать не следует так как 32 битные имеют под внешний компас отдельную внешнюю шину и могут различать внешний он или внутренний)
после калибровке компаса нужно проверить его работу направив нос коптера на север, юг, запад, восток (по ориентирам, туристическому компасу итд) и сверив направление красной линии в мишен планер сторонам света (север -верх карты)
апм лучше заменить на один из 32 битных контроллеров, это должно решить массу скрытых проблем, втч с компасом, лоитером
Я так понимаю, что имеется в виду повороты по ВСЕМ осям
параметр влияет не на повороты по осям. он определяет интенсивность запуска процедуры расчета “навигации”
в управлении самолетом три основных процесса
-
стабилизация достижение требуемых положений, углов и угловых ускорений по всем осям в пространстве. у стабилизации есть входные целевые значения определяемые либо системой навигации либо положением стиков
-
навигация расчет и задание целевых углов для системы стабилизации в автоматических режимах, в полуавтоматических режимах стаб, фбв, круиз целевые значения для системы стабилизации формируются со стиков
-
расчет требуемой энергии винта (в авто режимах)
Их так и нельзя прицепить?
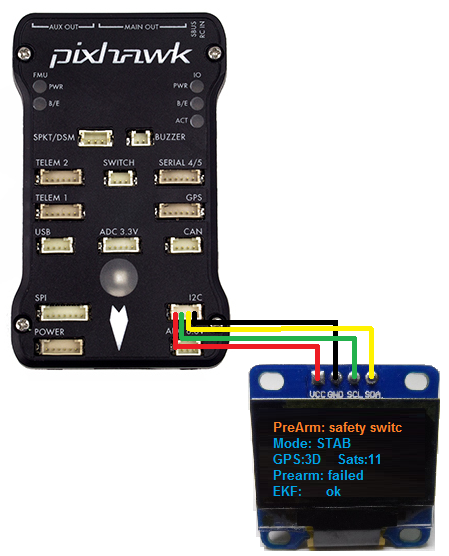
светодиодный семафор - стало крайне не информативно для современных прошивок. появилась масса предполетных проверок в частности число спутников достаточно ли, контроль вольтажа батареи, адекватность компаса и масса других сообщений.
для этого всего в i2c можно воткнуть и настроить компактный легкий и достаточно дешевый олед дисплей
извините, следовало процитировать пост
rcopen.com/forum/f123/topic516869/1451