
Что-то не так с этой Почтой России…

Подарили мне самый, наверное, народный GPS треккер TK-102, или IB-GT102.

Дело в том, что TK-102 и IB-GT102 хоть и собраны в одном корпусе и на одной плате - на самом деле разные треккеры.
В общем, при получении мной этого треккера убил я пару дней на подключение его к сервису онлайн отслеживания GPS-Trace.
Напишу пару строк в первую очередь для себя, а во вторую для тех, кто хочет попробовать прошивку Байчи для облегчения входа.
Оговорюсь сразу - это не мануал, как надо делать, это описание моего опыта.
Все опыты проводил на передатчике и приёмнике OrangeRX от Хоббикинга. Если у вас комплект от Flytrone - это тоже самое. Прошивки для передатчика 1 ватт и 100 милливатт одинаковые.
У Байчи есть прошивки и для других передатчиков и приёмников.
Соберу в кучку мысли и ссылки по интересному проекту приёмыша 433.
У приёмыша нет выходов PWM, зато есть PPM, SBUS и RSSI. И предельно маленькие размеры.
Совместим приёмыш с OpenLRSng и Baychi.
Разработан в двух версиях. С SMA разъёмом и без него.
Ссылка на Гитхаб.
Версия без SMA там лежит в формате EAGLE, с SMA в формате DipTrace.
Сами платы обоих версий можно заказать тут.
Для платы понадобятся:
Самая дорогая деталь - фильтр LFCN-490
По запросу HC-06 и сортировке по возрастанию цены на ебеях в первых пунктах (а значит в самых дешёвых) выпадает вот такой модуль.
Заказал ради интереса. На тот момент стоили в два раза дешевле “оригинала”.
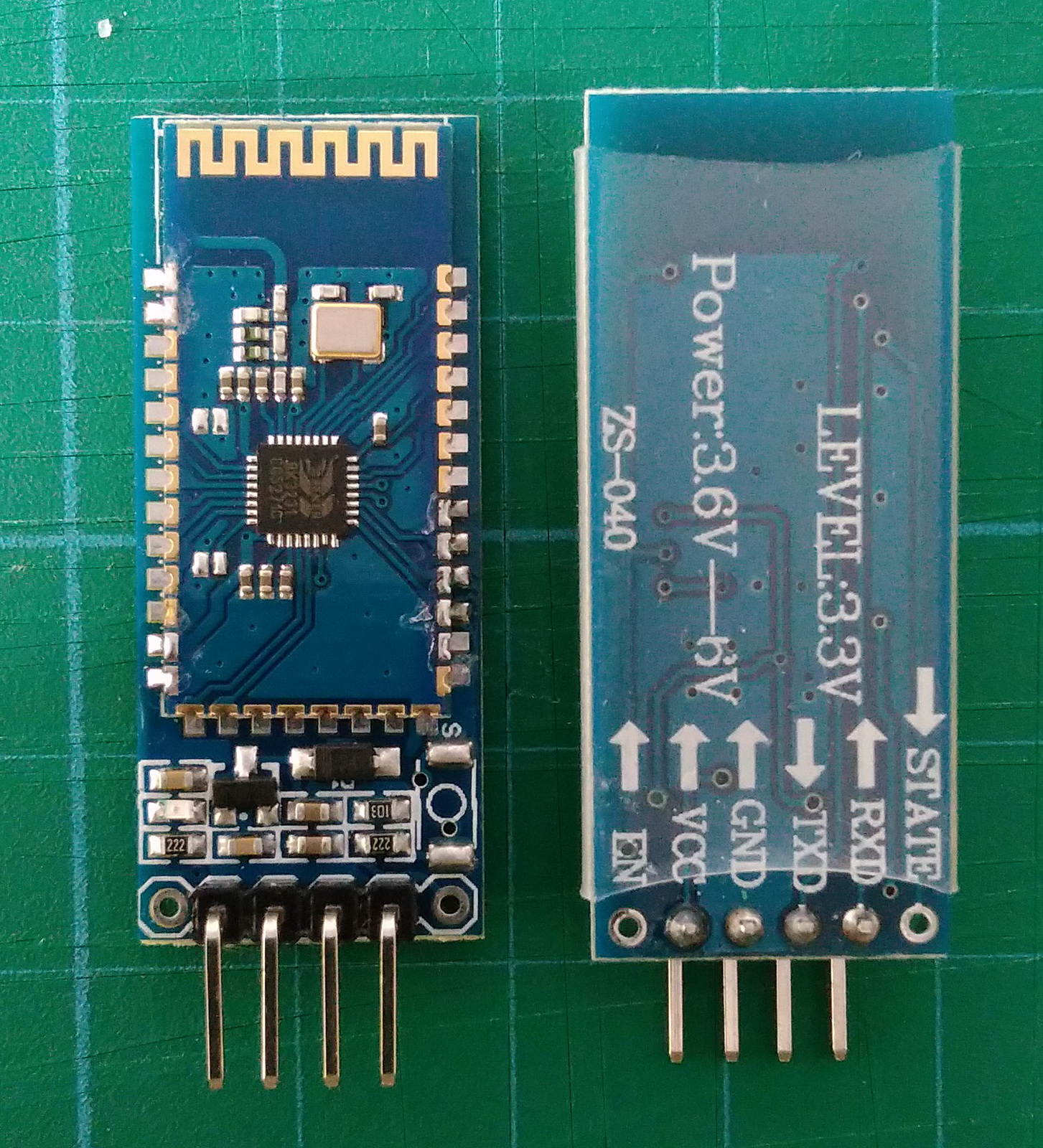
По радио модуль видится и подключается. Опознаётся как BT-04A, пин 1234.
Однако в одном терминале ни на одной скорости на AT он не отзывался.
Удалось достучаться до модуля только из монитора порта Arduino IDE, выбрав внизу “Оба NL & CR” по скорости 9600.
Вот такая прошивка на модуле.
Очень мне нравилась прошивка для OSD именуемая MWOSD.
Сейчас контроллер NAZA и я потратил несколько дней, чтобы подружиться с minNAZAOSD.
Не вышло. Не подружился. Просто ничего не работало.
И тут как-то краем глаза заметил, что MWOSD оказывается таки поддерживает DJI NAZA.
Надо-ли говорить, что радости моей не было предела. Наконец-то можно будет настроить через адекватное GUI!!
Итак, прошился. Спутники, компас - заработало сразу.
Все дополнительные данные у меня кушала AIOP и по UART-у отдавала на саму OSDшку.
С NAZA такого кайфа не будет. Придётся паяться к ножкам АТМеги.
Туториала на какую ножку что должно идти - нет.
Стал отталкиваться от единого стандарта с KV_team.
На них нашлась вот такая картинка:
RC_PITCH -> EXT_ROLL
RC_ROLL -> EXT_PITCH
FC_ROLL -> RC_PITCH
FC_PITCH -> RC_ROLL
BTN -> BTN
Колин Фёрз (Colin Furze) — британский каскадёр, сантехник и изобретатель — построил в своём гараже действующий ховербайк — летающий мотоцикл, поднимаемый в воздух двумя туннельными вентиляторами и зависающий над землёй, сообщает сайт журнала Popular Mechanics.
Ховербайк — это летательный аппарат, похожий на мотоцикл. Его идея появилась в фантастических произведениях, однако там он представляет собой действительно настоящий летающий мотоцикл. На данный момент в мире ховербайки существуют только в виде прототипов. Активный интерес к разработке ховербайков проявляет армия США.
Досталась машинка с раздолбанными пластмассовыми брызговиками.
Что делать? Cтавить алюминиевые.
В Кастораме куплена полоска алюминия шириной 50 мм и толщиной 2 мм.
Из осколков старых брызговиков делаем выкройку.
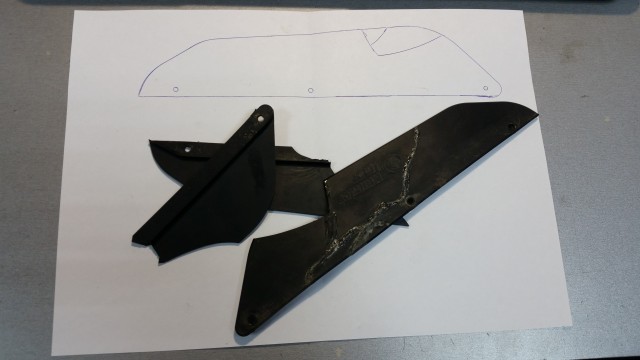
И долго и кропотливо выстригаем из алюминия бокорезами и ножовкой по металлу.
Дорабатываем напильником, сверлим дырки и вуаля!
Неубиваемые брызговики.
Достался мне Авионикс, а-ля Турнига 9Х и вместо батареек у него старенький аккумулятор.
И давно валяется заказанная на сдачу кучка разношёрстных внешних контроллеров.
И вот один из них решил попробовать внедрить в пульт.
Проверка на коленке показала отсечку вниз на 9.7, вверх не замерял, но надеюсь что всё хорошо.
Распаял в соответствии со схемой.
Дневник, в первую очередь, для себя, чтобы не забыть.
Имею две платки AIOP и пришёл мне датчик напряжения и тока, коих в итернетах полно.

Модуль содержит в себе датчик тока, датчик напряжения и BEC на 5 вольт с нагрузкой до 2А
Распиновка модуля такая:
Приобрёл пульт Avionix (один из клонов Turnigy 9X) и, разумеется, руки непомерно чесались прошить его на er9X. Только вот проблема - USBasp у меня не было и на радиорынке его, разумеется, не нашлось.
Зато у меня был Arduino Nano. И, как оказалось, им тоже можно прошить.
Процедура подпайки проводов описана для обоих ревизий неоднократно.

Данная статья не будет интересна специалистам, или просто разбирающимся людям, но, возможно, она хоть чуть-чуть упростит решение вопроса таким-же как я новичкам, которым впервые в руки попала эта OSDшка и на которых свалилась куча иногда противоречивой информации с сайтов на разных языках.
Из всех полётных контроллеров серии “сделай сам” я решил остановиться на AIOP, как на самом, как мне кажется, продвинутом.
Ну и, разумеется, если уж на аппарате есть видео - хочется и OSD.
Самым простым и самым доступным на сегодня способом организации OSD является MinimOSD, или MavlinkOSD, что, по сути, одно и то-же. Ревизий и внешних видов этих плат - огромное количество, но форм-фактор и принципы одни. Сегодня существует ещё одна плата, построенная на том-же принципе - Micro MinimOSD. В ней уже доработано питание, выведены необходимые разъёмы на измерение напряжения бортовой сети, видеосистемы, разъём датчика тока и разъём для измерения RSSI.
Однако я-же стал “счастливым” обладателем именно Mavlink OSD. Основной проблемой этого девайса является частое сгорание микросхемы MAX7456, которая, собственно, и отвечает за наложение информации на видео.
В этой плате питание цифровой части, на которой расположен процессор ATmega, отвечающий за обработку данных с полётного контроллера и питание аналоговой части, от которой питается вышеозначенный MAX разделены.
Как и все, захотел сделать себе коптер.
Изначально для видеосъёмок, потому может и под зеркалку даже.
Всвязи с этим выбор пал на гексу.
Не сильно вдаваясь в тему были куплены 6 медленных моторов, дешёвые китайские регуляторы, AIOP, дешёвая шестиканальная аппа FlySky и два комплекта дешевейших китайских 12" пропеллеров.
Тут и первая ошибка.
Дешёвые пропеллеры оказались очень мягкие и выгибались при работе наверх.
Однако, я не расстроен. Дело в том, что все возможные калькуляторы говорили, что летать моя комплектация не будет, ввиду этого не стал раззоряться на карбон, чтобы можно было с наименьшими потерями переделать комплектацию.
Однако гекса полетела. И полетела хорошо и относительно долго.
Вторая ошибка - аппаратура FlySky FS-CT6B.
Однако ошибка эта весьма относительна. При небольшом бюджете я-бы и сейчас остановил свой выбор именно на этой аппаратуре.