New entries

Я придумал и реализовал решение которое позволяет стабилизации работать во всем диапазоне хода стика газа без выключения моторов и вместе с тем дает возможность быстрого выключения моторов и включения их обратно стиком газа.
Для этого диапазон стика газа нужно тактильно разделить на 2 зоны:
- FlightZone 3-100% хода стика; моторы и стабилизация всегда включены (включен AirMode); стик газа двигается как обычно свободно
- MotorstopZone 0-3% хода стика; в этой зоне моторы выключаются; присутствует возможность выполнить арм/дизарм стиком; стик газа подпружинен и стремится вернуться во FlightZone
Что бы перейти из FlightZone в MotorstopZone нужно преодолеть небольшое сопротивление с кликом (например как нажатие кнопки трим или любой другой кнопки с кликом). Обратный переход свободный, после отпускания стика газа - он сам возвращается во FlightZone.
Смотреть всем любителям полетать высоко, далеко, да над народом владельцам Fantom, DJU и прочим RTF с камерами
Давно планировал изготовить кулаки для любимой машинки, но то времени не было, то материал не могу купить, ведь они выполнены из 30 мм капролона, и целый лист покупать не хотелось. Но вот звезды сошлись в нужную комбинацию, и все таки они вылупились
Госдума приняла закон об использовании беспилотников в воздушном пространстве России
www.gazeta.ru/army/news/8044601.shtml
пока такая инфа вот!
Погонялся zmr250 за машинами. 15 вылетов и 18 гигов материала утрамбовал в три минуты. ))
Добрый день, ищу трубу нержавеющую диаметр 8мм и стенка 1 мм. В розницу. Ищу надежное место.
Крепление хвостовой сервы выполнена из текстололита + втулочки с резьбой м3
Смешать, но не взбалтывать 😉
Исправленная русифицированная минимальная версия программы для подключения к компу Wltois v303
Кличка верту “Горыныч”
Немного легкой токарки
Изготавливаем канопу из стекловолокна, весь процесс не описываю, потому как муторно и руки постоянно грязные. а черновой вариант есть

Насмотревшись на подвиги коллег из ветки “далеко и высоко тактика и практика” я решил обзавестись Летающим крылом X8, после того как носитель был построен оказалось что имеющейся батареи 6000ma 6S хватает ему всего на час полета и ни о каком практическом применении с таким малым временем полета речи быть не может я решил озадачиться проблемой подбора емкой батареи. Имея опыт эксплуатации батарей в параллель, я вижу такое объединение весьма некомфортным, приходится постоянно заботиться о том чтобы батареи были равномерно заряжены, каждый раз объединяя их в “кластер” проверять равномерность заряда. Поэтому в неспешном режиме подыскивал емкую батарею с высоким отношением емкость/вес за приемлемые деньги.
Обычно я выбрасываю спам не читая, но так случилось что в этот раз я принял письмо китайского производителя батарей за письмо свое партнера. Вобщем китайцы предлагали батарейки и в их числе была такая как мне нужна… Чтобы не утруждать читателя не буду расписывать как заказывал и сколько ждал, в общем есть у меня теперь такой “кирпичик”
делаем площаку под аккум и площадку под гир и систему 3G
изготавливаем нижнюю площадку и резинки противоскольжения бонусом.
Размеры из интернета. Рисуем легкий эскиз и вперед!
потребовалось модифицировать файл проставки (от Юлиана) между пластинами квадра ZMR250, пришлось его реверснуть из stl файла.
ссылка на “оригинальный” файл SW - yadi.sk/d/f5jvi2DFmLYen
также модифицировал под свои размеры (высота 12 мм и отцентрированы и изменены выступы под лучи)
Мое любимое озеро для зимних полетов, внезапно сменило цвет )
Как известно основные проблемы всех полётных контроллеров связаны с вибрациями.
Я уже давно оснастил свой вертолёт платой Arduflyer (клон APM 2.5) от RCTimer.
Верт HK500GT с половиной запчастей уже от Align.
Недавно решил поставить мозги на демпфированный маунт. Вот что из этого вышло.
Маунт такой:
Лыжи изготовлены из ал. трубки ф8мм, шасси вырезаны из того же текстолита (каждая состоит из трех деталей) стыки пластин завалены смолой со стеклом.
Ну и покрасочка)))
Хвостовая балка от раптора 50
Блоки подшипников из текстолита + немного токарки
Впечатления получил двойственные. С одной стороны фильм снят очень здорово. Спецэффекты на высоте, динамика действия не дает оторваться ни на секунду, отлично выдержана оригинальная стилистика предыдущих частей саги… но вот все остальное, как бы это сказать 😃 С этого места предлагаю не читать тем, кто еще не смотрел фильм, но собирается это сделать. Дабы не поколебаться в вере в Светлую сторону Силы этом желании 😃
Решил построить вертолет своими руками. выбор пал на 550 рекса. смотрите сами
Вот что спасет нас от этого трэша)
Ко мне приехала Simple PDB плата, а это значит пришло время перестройки! Старая компоновка уже успела надоесть, аккумулятор всё время отлетает при крашах. Поставил мобиус - теперь они улетают вместе.
Поэтому я решил убрать как можно больше электроники внутрь первого этажа, расширенного до 10мм проставками (Юлиан своей новой сборкой тоже вдохновил, да и вот этот товарищ.
Итак, если с уменьшением высоты CC3D всё очевидно - там достаточно выпаять вертикальные штырьки и запаяться напрямую к плате - то с упаковкой приёмника FlySky IA6B всё намного сложнее. Даже без корпуса его высота порядка 15мм за счёт того, что к его торцу припаяна перпендикулярно плата с выводами. Как раз эту плату и было решено отпаять. Перед началом я прозвонил соединение и сохранил распиновку:
Андрюха кено снял про наши полетушки 😃
Удалось немного полетать в крытой студии на очень тесной трассе. Принимали участие в съемках репортажа Матч ТВ про гонки на коптерах.
Таки я его дожал.
Месячный НИОКР увенчался успехом.

На сайте ведомства FAA, которое в США отвечает за эксплуатацию летательных аппаратов, на всех владельцев беспилотников массой от 250 г до 25 кг с 21 декабря этого года распространяется требование пройти процедуру регистрации - речь идёт о частных владельцах БЛА, которые не используют их для извлечения выгоды.
RC best momenys 2015 - лучшие моменты
оригиналы можно увидеть тут:
Продолжим пожалуй, дурняк крепчал 😃
Испытания колец.
Поначалу было сложно попасть, т.к. колечко с 20 метров уже не видно, но потом приловчился 😉
Свечение в пасмурный день практически не помогает, посмотрим что будет в темноте (на снегу).
FPV вид
www.youtube.com/watch?v=5xgxqrFHl3g
Вид со стороны
Вода VS бесколлекторный мотор, дурняки продолжаются 😃
Горячий ЗИП.
Поскольку я клеил клеем УХУ-ПОР, перед ошкуриванием нужно сделать следующее:
смачиваю жидкостью для снятия лака (отобрал у жены) тряпку и удаляю этой тряпкой клей, который выступил по швам:

Нарезал! Все детали для сборки летающего крыла “Сова” поместились на четырех блоках 300*400мм и одном блоке 100*300мм, материал - экструдированный пенополистирол.

Пронумеровал детали. Детали с буквой R - для правой половины, с буквой L - для левой. Детали с буквой К - для крыла. Номерация от носа - к хвосту и от корня крыла - к законцовке.
Приобрёл пульт Avionix (один из клонов Turnigy 9X) и, разумеется, руки непомерно чесались прошить его на er9X. Только вот проблема - USBasp у меня не было и на радиорынке его, разумеется, не нашлось.
Зато у меня был Arduino Nano. И, как оказалось, им тоже можно прошить.
Процедура подпайки проводов описана для обоих ревизий неоднократно.

Немного предыстории
Практически с самого начала моего увлечения мультироторами я летаю на Cleanflight. До поры до времени меня всё устраивало, но когда мне надоело летать низко-близко встал вопрос возврата домой (обычного и по отказу РУ). После некоторого ковыряния в коде я решил переделать всю навигацию с нуля.
Так в апреле 2015 года началась работа над проектом Nav-Rewrite (который позже переименовался в iNav).
Главной идеей проекта стало добавление к “официальному” Клинфлайту продвинутой навигации.
Как, наверное, многие знают, проект OpenPilot перестал поддерживать полётные контроллеры CC3D. Соответственно, чтобы пользоваться CC3D приходится сидеть на старой версии.
Многие разработчики OpenPilot отпочковались в отдельный форк, LibrePilot. Совсем недавно, в ноябре, они выпустили свой первый релиз.
Изменений по сравнению с OpenPilot GCS 15.02 совсем немного. Главное для меня то, что они пофиксили креш на Mac OS - OpenPilot вылетал при перезагрузке полётного контроллера, в итоге визард приходилось проходить N раз, да и вообще было ощущение что вот-вот вылетит, и настройки потеряются.
Итак, я поставил LibrePilot, прошёл Wizard c нуля, по ходу обновил прошивку в CC3D до той, которую заливает LibrePilot. Выбрал предустановленный сет настроек “ZMR250 Chinese clone” - я раньше использовал его в OpenPilot, меня устраивает, всё стабильно и резво.
Остальное всё прошло абсолютно так же, как и в OpenPilot, разве что ничего не вылетало. Тестовый взлёт в домашних условиях прошёл успешно, на месте висит стабильно. Теперь нужно протестировать в поле.
Мотор SkyRC 1350KV сенсорник, регуль Xerun 150A


Несмотря на наезды некоторых Аксакалов, решил продолжить нести разумное, доброе вечное в не окрепшие умы вновь обращенных моделистов-коптероводов, первая серия видео ликбеза-плата распределения питания, что это, для чего, и как сделать изговнаипалок если сильно приспичило, а в доме нету 😃
Пульт Devo12E - сложная и непростая конструкция от компании Devention, которой оснащаются все продвинутые модели от Walkera - с 350Pro до Voyager3. Но разобраться в ней зачастую непросто, даже когда оно идёт в комплекте с аппаратом, поэтому пошагово опишу настройки пульта.
Базовая навигация в меню пульта: вход в меню по ENT; далее EXT - сброс, ENT - выбор, UP/DN и R/L - вверх-вниз и влево/вправо (что зачастую равноценно).
Прошивка
Для начала следует обратить внимание на прошивку: Ent - System Menu - About. Если прошивка (software) ниже 1.5 или версии B - смело переходим к обновлению прошивки, хуже не будет.
Существует две основных версии прошивки - 1.5 Pro (с настройками стиков и прочими полезностями) и 1.6 lite (удобная, но без настроек). Для начала работы крайне рекомендую выставить прошивку 1.5А.
Буквенные литеры прошивок олицетворяют максимальную мощность передатчика - для B-версий она ограничена 10 mw, т.е. +10dB; А-версии позволяют выставлять 100mw, т.е. +20 dB (System menu - Power Amplifier). А больше ничем они не отличаются, так что про В-версии смело забываем.
В последнее время огромную популярность получили видеообзоры всего. Наверное чтение и написание текстов становится чем то невероятно сложным. 😛
Я всё обозревать не стану, у меня нет всего. Моторчиков нет, самолётов нет, коптеров нет. Но у меня есть объектив и я его обозрею.

Вот такой обозреваемый. А теперь собственно обозреваем.
Пришли супер легкие моторчики для подвеса камер го-про и мёбиус класса.
Накидал небольшой обзорчик 😃
Вес моторов с проводами всего 18г.
Почему нужно подключать сигнальный земляной провод, и почему “а у меня и без него работает”.
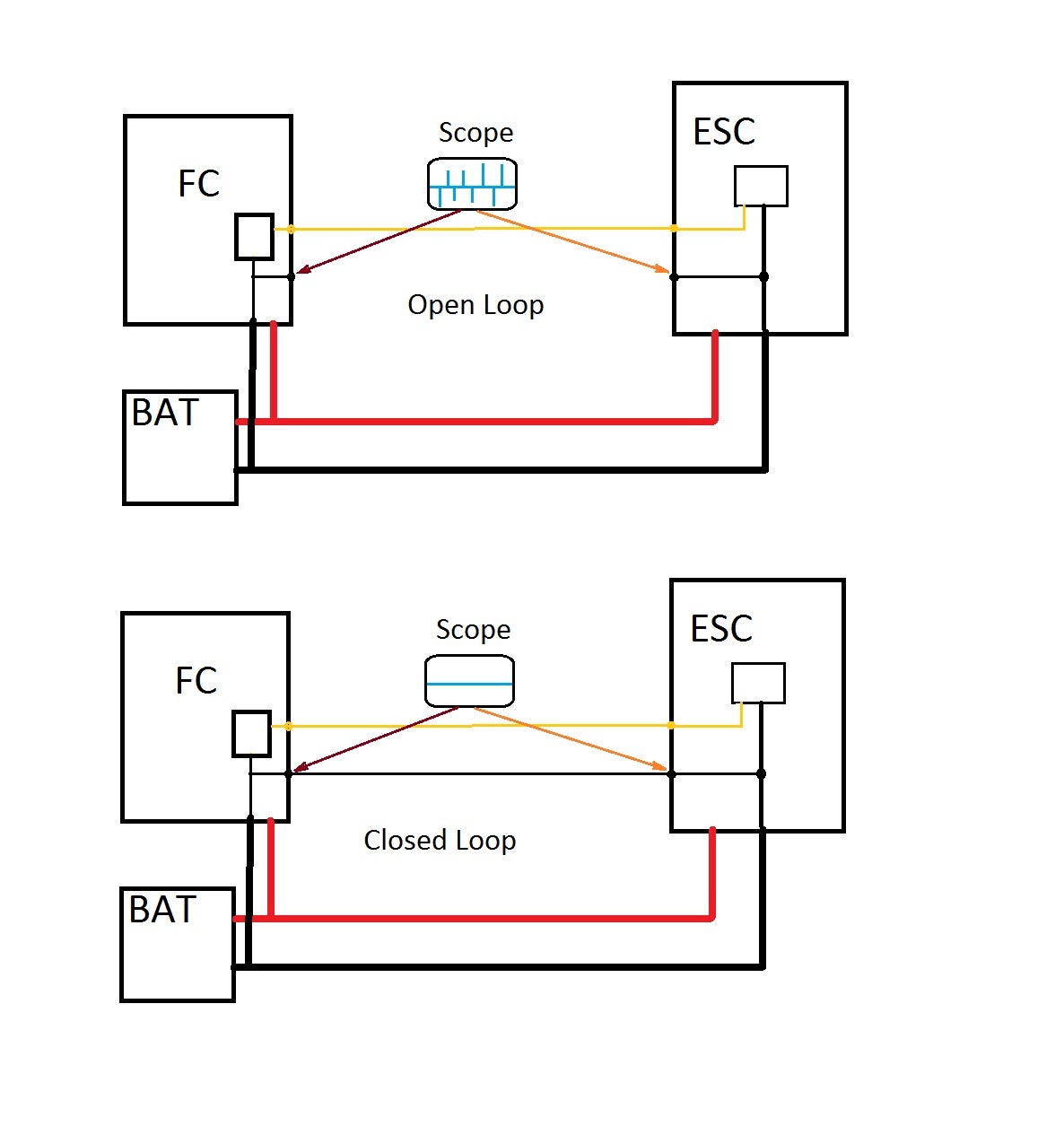
I do that type of scope measurement and we have a saying, “ground is not ground is not ground”. Meaning there is ALWAYS a Potential difference between two points if any current flows (Ohm Law: E = I*R).
Решил вот немного пографоманить и сделать что-то типа упрощенного обзора на процесс овладения радиоуправляемым вертолетом без особого углубления в технические подробности. Чтобы интересующиеся, пока еще в качестве «чайников», хотя бы приблизительно представляли себе, как это выглядит на самом деле.
Если вы хотите летать на нормальных 3Д моделях, а не на китайских одноразовых игрушках, то вы попали в правильное место! Но сначала нужно узнать несколько фактов-аксиом этого хобби.
Сначала кратко о нескольких фактах:
В ертолеты - это долго, сложно и дорого. И чем дальше в лес (глубже в хобби), тем толще нужен кошелек. 😃 На сегодняшний день сумма относительно
Итак, отписываюсь для отчёта. Решил я прошить свои регуляторы последней прошивкой. К счастью, в них уже зашит SimonK bootloader, и можно прошиваться по сервопроводу. USB ESC Linker-а у меня не было, поэтому собрал из arduino ArduinoUSBLinker. ОК, подключился, установил RapidFlash (у меня мак, поэтому не хотелось запускать винду для запуска BLHeli софтины).
Подключил, выбрал всё как положено в интерфейсе (COM port и ArduinoUSBLinker, master release, TGY прошивка), запустил прошивку. RapidFlash стирает старую и… зависает на writing. “Океееей”, думаю я. Если что, есть запасной ESC.
После нескольких неудачных попыток пришлось установить древнюю Java 6, ссылку на которую для мака ещё поискать надо, и запустил kkFlashTool. Запускаю прошивку оттуда. Начинает шить, но каждую секунду зависает с receiveMessage() timeout, ждёт, заливает ещё несколько байт и снова отваливается. В итоге минут за 10 он прошивает, но верификация так же не проходит. ОК, пытаюсь запустить двигателем с этим ESC, но не работает.
Я долго думал, почему же так происходит. Рабочей гипотезой были наводки на сигнальный кабель, цепь выходила достаточно длинной. Перепробовал кучу вариантов, в конце концов подцепился прямо к проводу на ESC, отрезав его от рамы. Но результат был тот же. Так же пробовал проишться из под виртуалки с виндой, в том числе из под BLHeli приложения. Нет.