переделка перьевого плотера в CNC

Ну, это просто и без разборки определить - подвигайте нежно ручками портал и каретку
я тож так думал… двигал вроде легкими рывками шла каретка- ремни зубчатые поимели…
а тама обычные моторы оказались с энкодерами…
а поначалу обрадовался…))))
MWW, наши похожи, по крайней мере недостатками по оси Y - каретка полноценная и у Вас, походу, одна, а на вторую просто опирание подшипником?
И горизонтальным расположением направляющих
Вот у kret_a_v грамотная вертикальная балка:) и грузоподъемность поболее будет.А м.б. кошернее будет сделать как у нас, чтобы подшипники мелкие ездили по направляющей наружной обоймой? Возмёте закрытые и ага… 😃
хм…😎
да и жырнее…😛
помоему у меня там и стоят подшипники а на них обоймы пластмассовые…
надо будет глянуть…
таки ДА !!!
rcopen.com/files/000000000000000000000000
rcopen.com/files/000000000000000000000000
😛😝
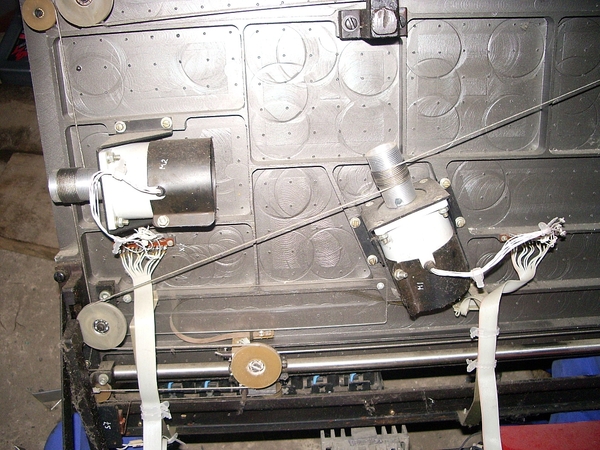
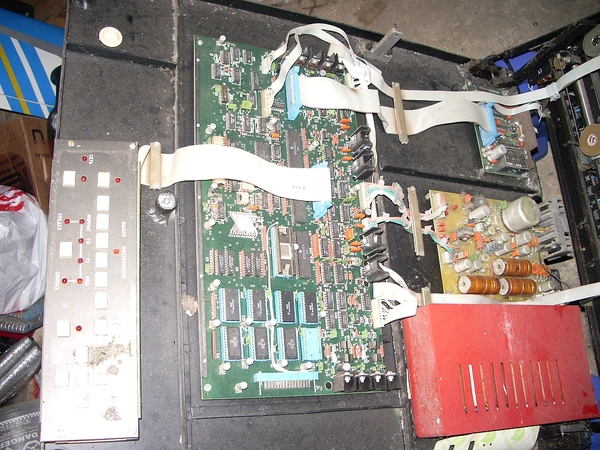
Ну, что… Добрался сегодня наконец-то до своего монстра… Четыре винта снизу, алюминиевый корпус снялся вверх. Потом еще один винт, и стол вместе со всей кинематикой и моторами откинулся вверх на двух шарнирных петлях, открывая вид на все внутреннее безобразие. В общем, моторы, как я понимаю, кажется шаговые. Тип определить не удалось, никаких бирок на них я не увидил, так-как закреплены они не за фланцы, а мощными хомутами прямо за корпус. Габариты - порядка 60мм в диаметре, и столько-же или чуть больше в длину. Со стороны выходного вала, квадратный фланец под четыре болта. Корпус покрашен светлосерой эмалью. А вот сзади, какой-то маховичек стальной, черного цвета, частично скрыт хомутом - вот это немного вызывает сомнение - может это энкодер? Просто я никогда не видел шаговых моторов, поэтому и такие сомнения… Жалею, что не взял с собой фотоаппарат - ну, ничего, завтра я это исправлю 😃 . Про электронику я вообще молчу - это просто кошмар… Даже если она полностью рабочая - то все равно ей место на помойке, однозначно…
ЗЫ Да, забыл написать - из моторов торчат выводы, МГТФ провода с бирками, по восемь проводов. Никаких редукторов на моторах нет - прямо на валах шкивы со спиральной канавкой для тросика.
А вот сзади, какой-то маховичек стальной, черного цвета, частично скрыт хомутом - вот это немного вызывает сомнение - может это энкодер?
Это маховик, применяется для борьбы с резонансами ШД
из моторов торчат выводы, МГТФ провода с бирками, по восемь проводов. Никаких редукторов на моторах нет - прямо на валах шкивы со спиральной канавкой для тросика.
Это хорошо - четыре обмотки с индивидуальными выводами от каждой. Возможны варианты с коммутацией в биполяр и в униполяр. Видел я такие ШД живьём, не застав акта потрошения. И кажется на rcopen.com тоже когда-то фотография ШД со спиральной втулкой на валу и маховиком была.
По поводу выкинуть электронику - всегда успеете. Она Вам может помочь хотя бы точно идентифицировать выводы ШД, слегка разрисовава выходной каскад драйвера. Мож, удастся использовать драйвер и БП. Фотографируйте
Ок. Завтра сфоткаю. Блок питания там трансформаторный, тяжеленный… А выходные каскады на транзисторах простых, в корпусе типа как у КТ-814. Каждый на своем радиаторе, их там многоо…
По поводу контроллера с драйверами - такой: 3ax LPT применить можно? Я понимаю, что это примитив, но это и не тот проект, на который электонику по две-три сотни зеленых ставить…
Почему бы и не применить, если работает?
на http://www.purelogic.ru скачайте файлик, (у меня на компе называется SM_connection.pdf ) - там представлена коммутация обмоток в биполяр и написано в чем разница получится момент vs скорость.
Ок. Завтра сфоткаю. Блок питания там трансформаторный, тяжеленный… А выходные каскады на транзисторах простых, в корпусе типа как у КТ-814. Каждый на своем радиаторе, их там многоо…
По поводу контроллера с драйверами - такой: 3ax LPT применить можно? Я понимаю, что это примитив, но это и не тот проект, на который электонику по две-три сотни зеленых ставить…
Ковырял я похожий. Драйвер там униполярный микрошаговый 1/8, сделан на таймере 580 серии и рассыпухе. Выдрать из схемы не получится - таймер инициализируется процессором 1801ВМ2. Завтра поищу, где то у меня были и фото и комбинация кнопок, котрая выводит его на встроенный тест: приятно посмотреть. Блок питания там хороший, если электролиты не высохли.
Это обещанные картинки - осциллограммы с измерительного резистора драйвера ШД плоттера.
Частота ШИМ примерно 40 кГц.
Двигатель ДШИ-200-0,5.
Команды:
- ввод+4 - нарисовать формат (контур)
- ввод+6(5) - взять перо и выполнить тест.
И 20 с лишком лет назад делали неплохие вещи, пусть и электроника была попроще, а платы - побольше.
Вот, как и обещал, фотки внутренностей:



Первый, и пока наверно единственный вопрос - как определить, что это за моторчики, какие у них параметры, совместимы ли они с каким-либо готовым драйвером, из бюджетных, ну, например из моей ссылки выше? Бирок на них никаких нет, если только под хомутами, но их снимать - значит всю конструкцию разобрать… А мне сейчас, до теплых времен не хочется этим заниматься… А вот потратить это время на заказ и получения драйвера, самое то было-бы…
Двигатель ДШИ-200-0,5.
ATLab, в моем - это они?
ЗЫ Только сейчас, на фотках 😃 заметил - движки закреплены все-таки фланцами… Хомуты вообще непонятно, зачем… Их наверняка можно снять, не разбирая всю конструкцию. Надо посмотреть, если это так, то вполне возможно, что под ними есть маркировка моторчиков…
Вроде это экраны, а под ними нет ли энкодеров? Проводов то много вон идет. У меня “потроха” от старого матричного принтера, там на горизонтальной подаче стоят и тут наверное тоже.
Вот, как и обещал, фотки внутренностей:
Первый, и пока наверно единственный вопрос - как определить, что это за моторчики
очень похожи ДШИ200-2
думаю даже точно, измерьте габариты, вал
MWW: У меня был такой же. Моторы ДШ-200-0,5 По сути те же ДШИ-200, только чуть слабее и индуктивность выше. Эти хомуты черные для красоты, а на валу круглые штуки - это типа так боролист с резонансом. тоже все снимается и остается просто сквозной вал. электроника с интерфейсом “стык2” - в помойку. я крутил-вертел и все-таки вставил современный контроллер. про бальзу не знаю - все-таки хлипковато. если вопросы - пишите - я свой такой же перебрал вдоль и поперек.
Спасибо, более менее все понятно стало… Насчет электроники - тут однозначно, даже и заморачиваться нехочу, только современный контроллер.
Насчет хлипковато - есть такое… Особенно ось Y. Или вторую круглую направляющую ставить, или как-то укреплять ту, которая плоская. По оси X, жесткость ИХМО достаточная… В качестве шпинделя, максимум, что можно применить - это моторчик типа ДП-25, или авиамодельный инранер, с цангой под самую маленькую фрезу. Надо еще что-то с осью Z придумывать, очень легенькое… В общем - игрушка получается, для “просто попробовать” что это такое… Ну, да ладно, попробую, а дальше видно будет.
Хомуты вообще непонятно, зачем…
Чтоб радиомеханика не накрутило на маховик при обслуживании 😃
ATLab, в моем - это они?
Вот ТТХ www.planar.by/ru/production/sm/dsi200/ можно померить сопротивление и индуктивность
Спасибо, по ссылке это именно они, сопротивление померяю при первой возможности…
Вот только теперь, возник еще один вопрос - в чем измеряется этот параметр - “Единичный шаг, град. и погрешность отработки шага - 1,8 (±3%)” - я так понимаю, что в градусах? Если так, то получается 200 шагов на оборот. Вот отсюда сомнения в точности - при перемещении каретки от края до края, вал двигателя делает (точно не знаю, примерно) два оборота. Значит, порядка 400 шагов. Точность позиционирования получается около 1 милиметра! Это конечно ни в какие рамки не лезет… Меня-бы еще 0.1 мм. устроила, но не целый милиметр! Но, плоттер тоже не мог рисовать так грубо… Значит я в чем-то ошибаюсь? Может этот параметр измеряется в минутах?
Спасибо, по ссылке это именно они, сопротивление померяю Может этот параметр измеряется в минутах?
если поможет
1,8° есть 1° 48’ ,
хоть мерь с десятичными, хоть с минутами, для полного оборота нужно 200 шагов и все дела
Но, плоттер тоже не мог рисовать так грубо…
Конечно, нет, где-то 0,1 мм должна быть повторяемость линии с учетом погрешности пишущего узла.
ATLab говорит, что там микрошаг 1/8 присутствовал, то есть 360/200/8=0,225 (тысячных) градуса. Я вот не знаю точно диаметр ШД, где-то сантиметров 6-8 по памяти руки 😃 .
Если прикидывать диаметр шкива, пусть будет миллиметров 25. Тогда Lокр=3,14*25= 75 мм или 75/200= 0,375мм перемещения троса на целый шаг. Или /8 =~0.05 мм- вот где-то так и д.б. быть.
Еще, есть подозрение, что за счет полиспастной схемы, движение по оси в два раза меньше, чем перемещение троса…
Значит я правильно понял… Как-же он тогда рисовал… Может мне показалось, что два оборота на весь ход каретки? Надо сегодня заехать, посчитать точнее.
Во, пока писал - уже ответили! 😃 Понятно, посмотрю сегодня.
Конечно, нет, где-то 0,1 мм должна быть повторяемость линии с учетом погрешности пишущего узла.
то есть 360/200/8=0,225 (тысячных) градуса.
ошибка вышла , sorry
У меня была документация пролная этого плоттера. Там заявленная точность - 0,3мм. Контроллер там древний - про микрошаг забудьте. Дискрета из расчета 200ш/об у этого плоттера и выходит 0,3мм в полном шаге (20ммвал*3,14/200шагов). Я поставил драйвера с дроблением 1/64 и стало все совсем хорошо.
У меня была документация пролная этого плоттера. Там заявленная точность - 0,3мм. Контроллер там древний - про микрошаг забудьте. Дискрета из расчета 200ш/об у этого плоттера и выходит 0,3мм в полном шаге (20ммвал*3,14/200шагов). Я поставил драйвера с дроблением 1/64 и стало все совсем хорошо.
Что ж так “забудьте”? Я же привел осциллограммы его родного драйвера, вполне красивый микрошаг 1/8, другое дело, что выдрать его скорее всего не получится.
Imho, с практической точки зрения, актуальнее вопрос с осью Y: там нужно не только повысить жесткость, но и приподнять ее, она же практически по столу ползает. А драйвер дело третье-четвертое-…-десятое.
Про микрошаг и повышение разрешаюшей способности механики от этого, уже устал повторять: микрошаг - для плавности движения, в данном случае, чтобы буквы и кривые на чертеже не были угловатыми.
Механически одна ступенька микрошага (в данном случае 1/8) не эквивалентна 1/8 полного шага. Если же добиваться такого результата, то кривая
- будет далека по форме от синусоиды
- для точности ее нужно формировать индивидуально для каждого двигателя,
- ее вид будет зависеть от скорости.
Я приподнял вот так. Правда, это стоило денежку, т.к. родные детали литые силуминовые = копеечные, а штучно изготовлять - фрезеровка и причем довольно сложная.