Трикоптер.

Хотите летать- рейсеры, хотите снимать- диджаи.
Это пройденный этап, просто было скучно, почитав Ваши посты, ну и приспичило…
к осени надо закупиться моторами, перебрать складную 450ю, ну осилю может трифекту
Проще сделать раму с нуля из карбоновых листов и трубок. Все необходимые крепления уже продаются в готовом виде, ничего печатать не нужно.
А почему именно трикоптер? Я с трифектой связался потому что она на 2015 год была самой маленькой складной рамой. У меня была мечта сделать маленький складной съемочный коптер.
Мне кажется трикоптер по всем статьям проигрывает квадрику, кроме маневра по яв. Но маневренность нужна только рейсерам, а рейсер должен быть крашестойкий, а трикоптер с механизмом поворота крашестойким быть не может. Ну и учтите что при одинаковых пропах и массе (если масса сервы равна массе моторки) время полета квадрика будет значительно больше! Так что тупик в трикоптеростроении…
Если кому то реально очень скучно и хочется время поубивать, то у меня идея: берешь две рамы трифекты, соеденяешь их задними сторонами (откуда третий луч торчит) и получаешь классный складной квадрик типа Валкера Витус.
берешь две рамы трифекты, соеденяешь их задними сторонами (откуда третий луч торчит) и получаешь классный складной квадрик типа Валкера Витус.
попробуем, как раз доедет втораяя рама
А почему именно трикоптер?
Да просто прикольно. Без особых преимуществ. Трифекта себя хорошо показала в плане эффективности и компактности, хочу получить такой же коптер, но побольше и без неудобств трифекты.
А потом бикоптер 😃
Шестеренки пока не дошли, собрал на пробу без них по соосной схеме
Может быть и не нужны они вовсе тогда.
Добрый! Настраиваю INAV 2.0 под трикоптер. Доска MATEK F405OSD. Захожу на вкладку mixer и вижу: серва висит на s1, motor2 на s2, motor3 на s3, а мотор 1 куда подключать?
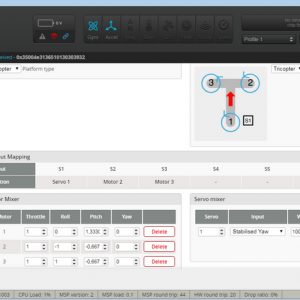
серва висит на s1, motor2 на s2, motor3 на s3, а мотор 1 куда подключать?
Мотор 1 на S2, мотор 2 на S3, мотор 3 на S4.
Мотор 1 на S2, мотор 2 на S3, мотор 3 на S4.
Когда загружаешь настройки для трикоптера

то s4 пусто.
Если же добавить 4 мотор вручную, через add new mixer rule, то получается как вы сказали, серва - s1, m1 - s2, m2 - s3, m3 - s4. Но тут проблема - третий мотор не крутится, никак не реагирует.
Доска MATEK F405OSD
У меня матек 405 CTR, может там есть отличие от OSD.
Также я еще не загружал Inav 2.0
Попробуйте начать с 1.9.1
Сайт Матека утверждает следующее
www.mateksys.com/?portfolio=f405-std#tab-id-6
Оказалось все работает отлично, просто у меня регуль 4 в 1, да еще китайцы намудрили с выводами из-за этого некорректно работали моторы, один просто не виделся.
просто у меня регуль 4 в 1, да еще китайцы намудрили с выводами из-за этого некорректно работали моторы, один просто не виделся.
Это каким образом получилось? Вы шлейфом соединяли регуль с матеком или как?
Это каким образом получилось? Вы шлейфом соединяли регуль с матеком или как?
Регуль 4 в 1 hackrc, соединяется с pdb matek, а pdb уже шлейфом с контроллером, но на регуле маркировка моторов не совпадает с действительной, короче выставил микшер для QUADX, перепаял очередность моторов на правильную и потом поменял настройки в микшере на tricopter
Встал такой вопрос. Хвостовой мотор, который наклоняется сервой, стоит выше центра вращения. Мотор с пропом весят 60 грамм. Соответственно получается, что это не очень хорошо, да? Т.е. центр тяжести перемещаемого объекта не совпадает с центром вращения. Вообще такое положение мотора наблюдал у многих трикоптеров, так что, видимо, это не смертельно.
Но не могу успокоиться - оставить как есть или пытаться переделать, чтобы мотор стоял ближе к оси вращения?
Тут еще такой нюанс, что когда мотор стоит выше, то поток воздуха от пропеллера получается более эффективным, т.к. разбивается об луч позже, а если мотор будет стоять на уровне оси вращения, то проп окажется прямо над лучом. Что тоже, наверно, нехорошо.
Что тоже, наверно, нехорошо.
заднему мотору на трехе всегда приходится работать за двоих.
разница в высотах роли не играет никакой. даже если перепад размером в половину рамы коптера - ну увеличится плечо и вектор тяги, электроника сама отработает получившуюся разницу, когда будет выравнивать в горизонт. Даже сам мотор хвостовой можно вообще другой вкорячите, другого производителя, с похожими характеристиками и размерами пропа, все равно летать будет. Разницу по тяге мозги сами скомпенсируют.
разница в высотах роли не играет никакой. даже если перепад размером в половину рамы коптера - ну увеличится плечо и вектор тяги, электроника сама отработает получившуюся разницу, когда будет выравнивать в горизонт
Да нет, я не за разницу в тяге переживаю, а за нагрузку на серву. С бОльшим рычагом ей придется больше энергии тратить и на поворот, и на удержание. Ну вот почему например в подвесах для камер все оси должны быть выровнены по центру тяжести?
Я наверно непонятно написал. Мотор находится на площадке, которая в свою очередь находится на вращающейся оси, которая вращается от сервы. Таким образом, центр тяжести мотора находится выше этой оси, и если мы его свободно отпустим, он сразу перевернется вниз. А если бы мотор располагался центром тяжести там же, где ось, то при его отпускании он бы не переворачивался, а оставался в том же положении. Вот стоит ли к этому стремиться?
в подвесах для камер все оси должны быть выровнены по центру тяжести
там немного другой принцип. модельный/подвесный БК мотор на старте имеет крутящий момент значительно ниже чем у сервы .Если бы всё было иначе, на трикоптеры заместо серв народ бы ставил бкшки, и радовался.
А вообще бы взглянуть на вашу конструкцию, у моей кинематика такая, что без разницы, насколько длинная штанга, роль играет только ее крепление к качалке сервы (ближе/дальше от шестеренки), соответственно меняется передаточное отношение, и нагрузка на серву/подвижные части
А вообще бы взглянуть на вашу конструкцию
Конструкция в этом посте: rcopen.com/forum/f123/topic156768/4713
(Ось находится внутри карбоновой трубы.) Я просто собрал хвост на пробу, он у меня валялся-валялся, потом внезапно подвернулась подходящая рама, стал ставить хвост и что-то призадумался. В любом случае попробую как есть, и параллельно буду делать вторую версию с другой балансировкой.
спорная конструкция, честно говоря. Ось сервопривода далеко от нижнего фланца движка, не очень с точки зрения живучести и энегрозатрат на удержание. Самая удачная из виденных мною - у пираньи, rcopen.com/blogs/14032/10771 , там мотор находится в “кроватке”, и воображаемая ось вращения проходит прямо через него.
Ось сервопривода далеко от нижнего фланца движка, не очень с точки зрения живучести и энегрозатрат на удержание.
Вот именно про эту проблему я и пишу. Я могу сделать уголок пониже и поставить мотор-блинчик, но полностью она не решится.
А насчет спорности - ну, говорю, что у многих такой же принцип. Например вот:

воображаемая ось вращения проходит прямо через него.
Вот теперь тоже хочу, чтобы ось проходила. Но не знаю - то ли сразу все сломать и переделать, то ли попробовать как есть.