MultiWii

Если коротко то в конфигураторе выставляются PID значения, только не понял почему у тебя конфигуратор 1.6 если прошивка 1.7
Не конфигуратор 7-й и прошивка 7-я, это я так первую попавшуюся вставил фотку. То есть, после того как я установил прошивку, в конфигураторе надо выставить пиды и потом сохранить это все в конфигураторе?
Правильно, после прошивки запускаешь конфигуратор, подключаешься к своему COM порту, нажимаешь START, потом READ. Прочитаяшь дефалтовые установки. Мышкой на двигаешь по цифрам и они меняются. После того как установил нажимаешь WRITE и они будут записаны в атмегу. Чтоб откалибровать нужно добиться максимальной горизонтальности твоего коптера (гироскопов) Нажал CALIBRATE, затем WRITE.
Вот так делал я.
сегодня вот немножко полетал, пока не крешнулся пару раз основательно 😃 можно сказать отделался легким испугом: -1 проп и чутка погнутый луч… электронику пока не проверял… надеюсь все ок…
Классно летает. Мой пират пока так не может…
Классно летает
только пилоту бы (мне т.е.) руки проапгрейдить было бы ваще гут 😃 А то мой бедный квадрик уже столько раз падал, что не сосчитать 😃
уже один мотор клеенный, луч один погнул так что при попытке восстановить он не выдержал и ушел в утиль 😃 Вибрация стала сильнее т.к. моторы колбашенные-переколбашенные… одним словом учусь понемногу 😃 Надо больше в симе летать, не лениться… После него многие элементы на ура в реалиях повторяются… полезно одним словом…
Кстать летаю на дешевых пропах с HK 8 дюймов… и за счет того что они тонкие и гибкие, ломаются редко, что дает большой плюс новичкам… на днях буду пробовать девятки уже… те потолще, думаю будут ломаться чаще… и помним - не забываем что эти пропы надо балансировать…
Мой пират пока так не может…
уверерн что дело в ПИД-ах… я както писал пост про ПИД-ы… там ссылки были полезные… рекомендую разобраться, поможет понять как это работает и как тюнить…
уверерн что дело в ПИД-ах
Не думаю. На В8 прошивке летал, правда с колбасней, но летал. А на 33 не хочет. Вернусь на В8
Парни, подскажите еще такой вопрос, сильно не пинайте, я пока с малого разбираюсь, вчера каким-то чудом заработал конфигуратор, а когда графики начали дергаться от моей WMP, радости не было предела 😃. Но есть еще вопросы.
Прошу подсказать, вот на схеме для реализации GIMBAL (см. пожалуйста во вложение внизу) там если не подключать приемник сервы должны работать? Не пойму для чего при реализации подвеса камеры нужна связь с приемником? Гира же должна отслеживать сама горизонт. Просто у меня получается, что в конфигураторе отрисовываются движения гироскопа (у меня WMP ITG 3205 подключал пока по шине I2C), а сервы стоят. Я подключил пока без приемника.
для реализации GIMBAL
- В скетче раскомментировать //#define SERVO_TILT, перезалить прошивку.
- Запустить конфигуратор, START-онуть, нажать READ, “закрасить” 3 квадратика правее надписи camstab нажимая мышкой на них.
- Нажать WRITE для записи параметра, потом READ для проверки.
Пришел мне BMA180. Подключил. Режим стабилизации есть, работает. Вобщем, в горизонте все нормально, а стоит наклонить коптер и немного разогнать и все, потом очень тяжело его вернуть в горизонтальное положение. Прошивка последняя DEV
DEV
У меня платка AllInOne. Там тоже аксель BMA180. Вчера летал на DEV20110705. При включении стаб мода его колбасит и почему то тянет назад.
Плата AllInOne припаяна на PARIS Aerial Photography v3.0 board. Калибровку выставляю по уровню “таблетка”. Уменьшал P почти до акро мода. Не помогло.
Вот еще странность этой прошивки…при включении бары секунды 2 повисел, потом стрельнул вверх. Выключил бару, взлетел повыше, включил и квадрик повисел 2-3 сек и дернул вниз…ух уж эти DEV эксперименты.
В итоге самой стабильной считаю dev20110629. Вернулся к этой прошивке и аксель стал работать как надо.
Но баро на ней вообще не работает. Включаю бару, отпускаю газ, а квадрику пофиг до удержания высоты…в чем может быть дело?
Значит эти DEV на столько отличаются? Кошмар… Попробовал бы dev20110629, да только ее уже нет на code.google… Хотя, у меня осталась. Буду пробовать. Спасибо
Вопрос к пользователям Аллинон. Контактные площадки на плате относятся к адресу акселя? Гдето прочитал, на этой ветке, что обе нужно подключить на землю. Так и сделал, но в ГУИ не меняются показания акселя, хотя моделька коптера реагирует адекватно и даже компас работает.
Всем спасибо, разобрался. Площадки в Мильтивии также работают, обе замкнуты на землю. Проблема в адресе акселя. По умолчанию 0Х80, поставил 0Х82 и все заработало. Спасибо kergo. Наверное проще установить дефайн для платы в дефах. Как на других платах.
Аллинон. Контактные площадки на плате относятся к адресу акселя
rcopen.com/forum/f123/topic232641/825
Я замкнул двойную площадку, в тройной средний контакт посадил на землю. В Ардупирате работает, насчет мультивии- не знаю.
Вопрос к пользователям Аллинон.
Я просто меняю адрес в скече
#if !defined(BMA180_ADDRESS)
//#define BMA180_ADDRESS 0x80 <----c этого
#define BMA180_ADDRESS 0x82 <----на этот
#endif
что обе нужно подключить на землю.
Нужно обе подключить на землю и изменить в скетче адрес акселя на 0х82
Платку только принесли, попробовал подключить и изменил адрес. Похоже сегодня поработаю с коптером после возвращения с работы, руки чешутся! Пока с Мультивием, но и Пирата теперь можно пробовать.
В dev0714 вроде заработал alt_hold!!! Сегодня проверю!
Может кто сталкивался? Собираю коптер… Ардуина + платка wii. От акб стартует норально, моторами крутит,пытался подлетнуть даже… Вроде ведет себя адекватно. При подключении к USB + прога конфигуратор ардуина запускается через раз,виснет и.т.д. Иногда может поработать несколько минут и зависнуть. При внешнем питании и USB комп вообще пишет неопределенное устройство.
Продолжаю разбираться, скажите, как такое может быть. Использую Мультивии 1_7. Есть вопросы:
- Раскоментировал только строку GIMBAL, гироскоп и акселерометры ни один в списке не раскомментирован, а сервы работают, то есть реагируют на шевеление гироскопа, так и должно быть?
- плата гироскопа и акселерометра (нунчак 6331) пока лежать раздельно, не являются одним целым, так сказать, так вот когда шевелю гироскопом все рисует четко и очень чувствительно, сервы работают резво и на полный ход, чуть резко наклонишь пики выскакивают далеко вверх за белый экранчик, а когда отдельно шевелю акселерометр (нунчак), то по осям тоже отклоняются кривые, но очень медленно и плавно и сервы еле двигаются, когда трясу акселерометр с амплитудой 20-30 см, пики увеличиваются, но за экран не выходят, как сильно не тряси. Скажите так и должно быть? Или надо загрублять чувствительность гироскопа? Или когда аксель и гира будут стоять на одной платформе все будет ОК?
Из RSS - Demystifying PID Control with a look at the new Arduino PID library
Ыыы… МБ адаптируют и в Мультивий…
при подключении к компу напротив нунчак зелененьким что он включен, как только подключаю апу надпись меняется на красную OFF
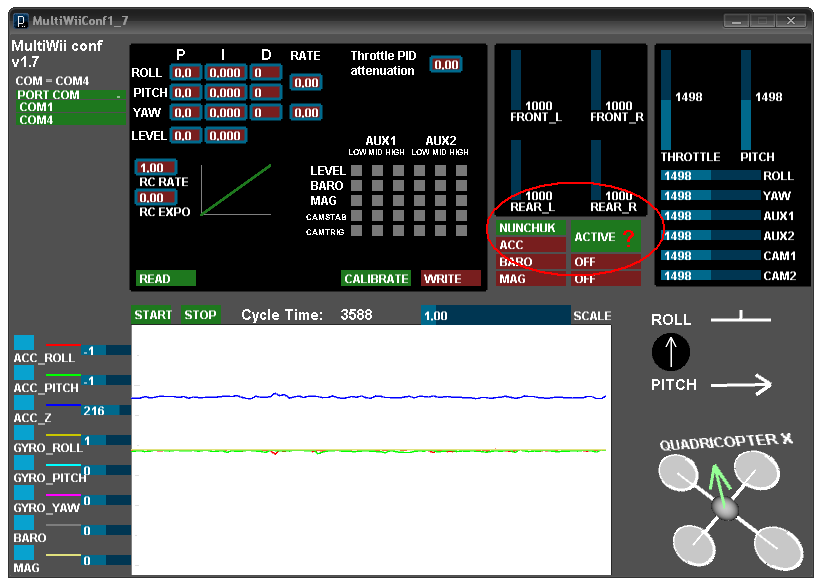
при переключении тумблера на апе меняются только показания в полях CAM
и AUX подскажите что не так?