MultiWii

Продолжаю разбираться, скажите, как такое может быть. Использую Мультивии 1_7. Есть вопросы:
- Раскоментировал только строку GIMBAL, гироскоп и акселерометры ни один в списке не раскомментирован, а сервы работают, то есть реагируют на шевеление гироскопа, так и должно быть?
- плата гироскопа и акселерометра (нунчак 6331) пока лежать раздельно, не являются одним целым, так сказать, так вот когда шевелю гироскопом все рисует четко и очень чувствительно, сервы работают резво и на полный ход, чуть резко наклонишь пики выскакивают далеко вверх за белый экранчик, а когда отдельно шевелю акселерометр (нунчак), то по осям тоже отклоняются кривые, но очень медленно и плавно и сервы еле двигаются, когда трясу акселерометр с амплитудой 20-30 см, пики увеличиваются, но за экран не выходят, как сильно не тряси. Скажите так и должно быть? Или надо загрублять чувствительность гироскопа? Или когда аксель и гира будут стоять на одной платформе все будет ОК?
Из RSS - Demystifying PID Control with a look at the new Arduino PID library
Ыыы… МБ адаптируют и в Мультивий…
при подключении к компу напротив нунчак зелененьким что он включен, как только подключаю апу надпись меняется на красную OFF
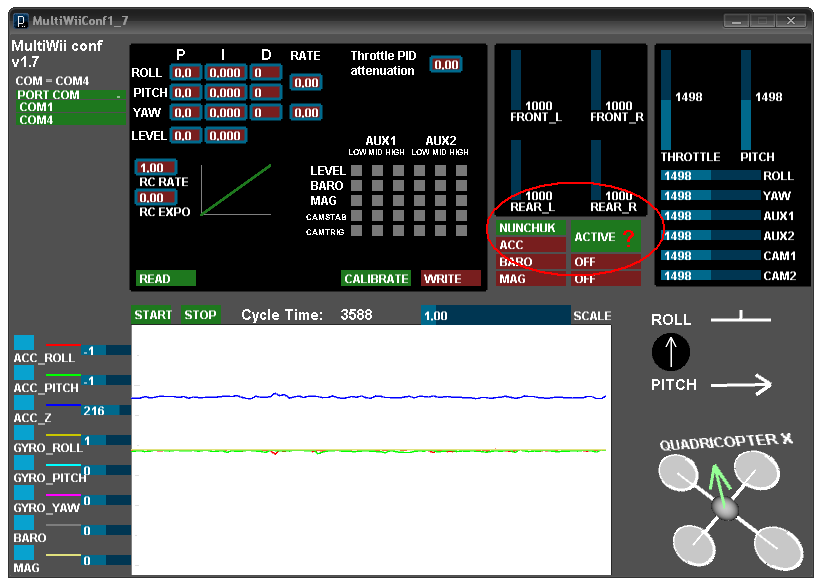
при переключении тумблера на апе меняются только показания в полях CAM
и AUX подскажите что не так?
А где квадратики зачеканные в табличке AUX1 LEVEL BARO MAG? Нет квадратиков, значит не включится ни левел, ни баро, ни маг.
А где квадратики зачеканные в табличке AUX1 LEVEL BARO MAG? Нет квадратиков, значит не включится ни левел, ни баро, ни маг.
благодарю, поставил чеки на два кубика, заработало
если не трудно, объясните назначение этих чек-боксов, спасибо
Например левый квадратик - включено в минимальном положении тумблера или крутилки, средний в нейтральном, правый в максимальном. Уменя левел включен всегда, маг в ннйтральном и максимальном, баро только в максимальном.
подскажите, где в новых(в 1.7 видел, а в новых не вижу) прошивках загрубить гиру ?
подскажите, где в новых(в 1.7 видел, а в новых не вижу) прошивках загрубить гиру ?
а как в 1.7 загрубить гиру?
а кто-то уже использует эту прошивку для стабилизации крыла? щас собрал на wmp+nunchuck + 2 сервы - как то они странновато себя ведут имхо
Добрый день! Только начинаю…
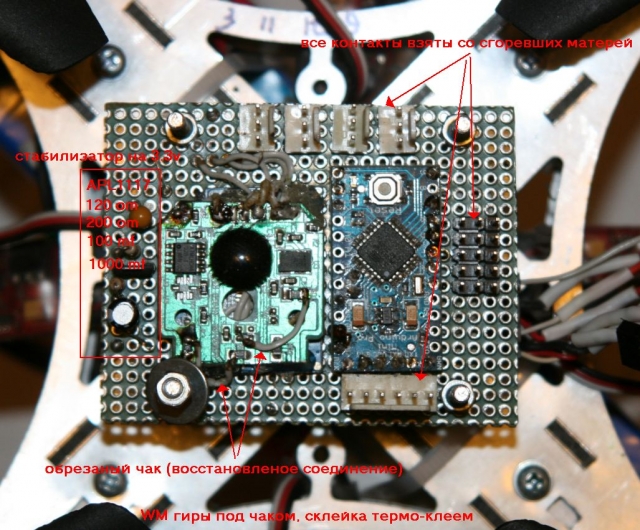
Пожалуйста распинуйте подключение чака и моушена к плате на фото ниже (Freeduino Nano v5):
так же как тут:
radio-commande.com/wp-content/…/quadX.jpg

А в каком режиме подключать нунчак то? native, adcacc?
чет ребят форум в скукоту превратился какуютА… ни идей новых, ни мыслей умных, ни видива удачно собравших коптеры…
глобальная миграция на MegaPirate?
А в каком режиме подключать нунчак то? native, adcacc?
если только один нунчак, то там в коде в разделе акселерометров есть строка про него… если через wmp, то просто ничего не раскоментировать в датчиках
Завтра мигрирую на дачу с коптером. Точнее уже сегодня.
Для начала - освоить полёт. Потом…
А вот потом у меня закуплена платка Leaf Maple (Cortex M3)
Собственно - это ARM со всеми его прелестями, но с Ардуино-совместимостью, причём как-бы так вплоть до того, что его IDE - адаптированная Ардуиновская…
Хочу, соответственно, адаптировать, поставив вместо Сидуины. Даст большую скорость обработки и позволит реализовать разные навороты…
Ну и в плюсе - прибарахлился эхолокатором: посадку МБ будет делать норм…
как отключить изменение программы в контроллере?
дело в том что у меня постоянно сбрасываются настройки/скеч при включении/выключении
как загрубить гиру в 1.7?
напишите пример кода пожалуйста
С мегапиратом не лучше…
Павел, давай подключай ARM, будет супер если заработает!!!
Товарищи, помогите чайнику разобраться, а то опасаюсь спалить WMP 😊
Кто делал коптер с wmp на itg 3205, укажите к каким контактам на плате нужно подпаяться. Думаю мою головоломку “для блондинок” не сложно будет заполнить… Спасибо.
Вот так припаивать с перерезанием дорожки
rcopen.com/forum/f123/topic221574/2927
Это при условии что WMP именно той версии.
А вот потом у меня закуплена платка Leaf Maple (Cortex M3)
Собственно - это ARM со всеми его прелестями, но с Ардуино-совместимостью, причём как-бы так вплоть до того, что его IDE - адаптированная Ардуиновская…
Хочу, соответственно, адаптировать, поставив вместо Сидуины. Даст большую скорость обработки и позволит реализовать разные навороты…
буду следить за успехами в адаптации …
вытянул проекты печаток маплОФФ , можно будет заказать пустых платок для народу по демократичной цене … да и stm32 стоят ужо дешевле avr …
ЗЫ : FFIMU печатки ужо заказал … недели через 2-3 получу … если кто сподобится прикрутить к проекту MPU-6000 то резведу и закажу супермелкие платы под мегу328 и/или stm32 (48 ног) для супермелких квадрикОФФ …
У Фабио много наработок по платкам с датчиками www.varesano.net/blog/fabio
У кого-то есть в Москве свободный комплект разъемов XT60? С радостью бы приобрел. В пилотаже таких нет.
Или подскажите где в выходные можно приобрести 😃
ну, вот и я полетел )


содержимое:
C2822-1400 Электромотор бесколлекторный outrunner для самолета, 100Вт, 1400RPM, 37г
TURNIGY Plush 10amp 9gram Speed Controller
пропеллеры epp0845
WM
NC
Arduino mini pro
LiPo 3000 mA 3s
рама учебный вариант (крестовина второй вариант здесь)
аппа Турниги 9ч
да, плюш слабее чем мотор, но работает и греется не очень, градусов 60 не более, так получилось что они раньше пришли
рама переделана под учебный вариант, не убиваемая, защита от падений метров с трех (гнутся шасси, отваливается аккумулятор (вырывает его по инерции, закреплен на стяжках) но все остается живым)
время полета примерно минут десять
устанавливался моск ХК, очень радовало до того как запустил на ардуино с акселем, летает стабильно да же при не настроенном ПИД (П-4, все остальное по нулям)
с ПИДом пока не разобрался, постоянно что то не получается настроить, то одно не пашет, то другое, по несколько раз не могу запустить моск, но как запускается, радости полные штаны от полета )
рама первый вариант (здесь) не работает, очень сильная вибрация с этими моторами, моторы которые были заказаны пришли все с дефектами (заказывались с российского сайта, линк выше с сайта производителя, еще идут, как придут отпишусь о качестве), у некоторых шумит подшипник, у двух смещены крепления под проп, в общем под раму со слабыми лучами вибрация бешеная, но стоило поставить лучи на 15мм квадрат, вибрация исчезла, полет стабильный
а, еще, не делайте раму из фанеры (относится к учебному варианту), фанера таких крашей не выдержит, делайте из композита, он тяжеловат, но крепкий, проверено на собственном опыте, каждый краш сопровождается выравниванием руками и продолжением полетов, да же иногда лучи не выдерживали из алюминия, но рама всегда готова к полетам, конечно не вечная она, первый вариант рамы уже в хлам превратил, выгибать уже нечего )
а где фото/видео полета? сколько примерно летает?
Ты прям как Станиславский с его нетленным “Не верю!” 😃
Александр, а вес коптера не известен? Сколько он в такой кольчуге весит интересно? 😃
Мой на такой раме из 3 мм оггстекла и круглых трубках 10 мм с батареей 2,2 весит 1050 г. С винтами 10х6 с ХК взлетает на 1/3 газа