MultiWii

для реализации GIMBAL
- В скетче раскомментировать //#define SERVO_TILT, перезалить прошивку.
- Запустить конфигуратор, START-онуть, нажать READ, “закрасить” 3 квадратика правее надписи camstab нажимая мышкой на них.
- Нажать WRITE для записи параметра, потом READ для проверки.
Пришел мне BMA180. Подключил. Режим стабилизации есть, работает. Вобщем, в горизонте все нормально, а стоит наклонить коптер и немного разогнать и все, потом очень тяжело его вернуть в горизонтальное положение. Прошивка последняя DEV
DEV
У меня платка AllInOne. Там тоже аксель BMA180. Вчера летал на DEV20110705. При включении стаб мода его колбасит и почему то тянет назад.
Плата AllInOne припаяна на PARIS Aerial Photography v3.0 board. Калибровку выставляю по уровню “таблетка”. Уменьшал P почти до акро мода. Не помогло.
Вот еще странность этой прошивки…при включении бары секунды 2 повисел, потом стрельнул вверх. Выключил бару, взлетел повыше, включил и квадрик повисел 2-3 сек и дернул вниз…ух уж эти DEV эксперименты.
В итоге самой стабильной считаю dev20110629. Вернулся к этой прошивке и аксель стал работать как надо.
Но баро на ней вообще не работает. Включаю бару, отпускаю газ, а квадрику пофиг до удержания высоты…в чем может быть дело?
Значит эти DEV на столько отличаются? Кошмар… Попробовал бы dev20110629, да только ее уже нет на code.google… Хотя, у меня осталась. Буду пробовать. Спасибо
Вопрос к пользователям Аллинон. Контактные площадки на плате относятся к адресу акселя? Гдето прочитал, на этой ветке, что обе нужно подключить на землю. Так и сделал, но в ГУИ не меняются показания акселя, хотя моделька коптера реагирует адекватно и даже компас работает.
Всем спасибо, разобрался. Площадки в Мильтивии также работают, обе замкнуты на землю. Проблема в адресе акселя. По умолчанию 0Х80, поставил 0Х82 и все заработало. Спасибо kergo. Наверное проще установить дефайн для платы в дефах. Как на других платах.
Аллинон. Контактные площадки на плате относятся к адресу акселя
rcopen.com/forum/f123/topic232641/825
Я замкнул двойную площадку, в тройной средний контакт посадил на землю. В Ардупирате работает, насчет мультивии- не знаю.
Вопрос к пользователям Аллинон.
Я просто меняю адрес в скече
#if !defined(BMA180_ADDRESS)
//#define BMA180_ADDRESS 0x80 <----c этого
#define BMA180_ADDRESS 0x82 <----на этот
#endif
что обе нужно подключить на землю.
Нужно обе подключить на землю и изменить в скетче адрес акселя на 0х82
Платку только принесли, попробовал подключить и изменил адрес. Похоже сегодня поработаю с коптером после возвращения с работы, руки чешутся! Пока с Мультивием, но и Пирата теперь можно пробовать.
В dev0714 вроде заработал alt_hold!!! Сегодня проверю!
Может кто сталкивался? Собираю коптер… Ардуина + платка wii. От акб стартует норально, моторами крутит,пытался подлетнуть даже… Вроде ведет себя адекватно. При подключении к USB + прога конфигуратор ардуина запускается через раз,виснет и.т.д. Иногда может поработать несколько минут и зависнуть. При внешнем питании и USB комп вообще пишет неопределенное устройство.
Продолжаю разбираться, скажите, как такое может быть. Использую Мультивии 1_7. Есть вопросы:
- Раскоментировал только строку GIMBAL, гироскоп и акселерометры ни один в списке не раскомментирован, а сервы работают, то есть реагируют на шевеление гироскопа, так и должно быть?
- плата гироскопа и акселерометра (нунчак 6331) пока лежать раздельно, не являются одним целым, так сказать, так вот когда шевелю гироскопом все рисует четко и очень чувствительно, сервы работают резво и на полный ход, чуть резко наклонишь пики выскакивают далеко вверх за белый экранчик, а когда отдельно шевелю акселерометр (нунчак), то по осям тоже отклоняются кривые, но очень медленно и плавно и сервы еле двигаются, когда трясу акселерометр с амплитудой 20-30 см, пики увеличиваются, но за экран не выходят, как сильно не тряси. Скажите так и должно быть? Или надо загрублять чувствительность гироскопа? Или когда аксель и гира будут стоять на одной платформе все будет ОК?
Из RSS - Demystifying PID Control with a look at the new Arduino PID library
Ыыы… МБ адаптируют и в Мультивий…
при подключении к компу напротив нунчак зелененьким что он включен, как только подключаю апу надпись меняется на красную OFF
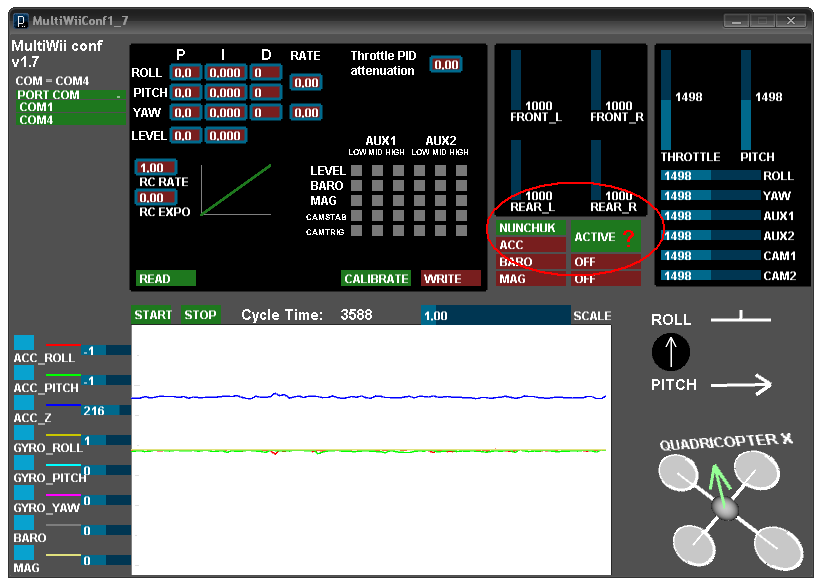
при переключении тумблера на апе меняются только показания в полях CAM
и AUX подскажите что не так?
А где квадратики зачеканные в табличке AUX1 LEVEL BARO MAG? Нет квадратиков, значит не включится ни левел, ни баро, ни маг.
А где квадратики зачеканные в табличке AUX1 LEVEL BARO MAG? Нет квадратиков, значит не включится ни левел, ни баро, ни маг.
благодарю, поставил чеки на два кубика, заработало
если не трудно, объясните назначение этих чек-боксов, спасибо
Например левый квадратик - включено в минимальном положении тумблера или крутилки, средний в нейтральном, правый в максимальном. Уменя левел включен всегда, маг в ннйтральном и максимальном, баро только в максимальном.
подскажите, где в новых(в 1.7 видел, а в новых не вижу) прошивках загрубить гиру ?
подскажите, где в новых(в 1.7 видел, а в новых не вижу) прошивках загрубить гиру ?
а как в 1.7 загрубить гиру?
а кто-то уже использует эту прошивку для стабилизации крыла? щас собрал на wmp+nunchuck + 2 сервы - как то они странновато себя ведут имхо
Добрый день! Только начинаю…
Пожалуйста распинуйте подключение чака и моушена к плате на фото ниже (Freeduino Nano v5):
так же как тут:
radio-commande.com/wp-content/…/quadX.jpg
