MultiWii

ззы. Так что там с компасом на меге 2560? щас как раз платку под нее развожу. С ней хоть летает все? или еще не стоит тратить время, которого ужасно мало )))))))
Делайте смело,все прекрасно работает и даже летает)))
А вот кто что посоветует, собрал квадрик, моторы rctimer 2830 750kv, винты 11х45, регуляторы turnigy plush 30a, батарея 3s 20-30c 2700мач, плата freeimu2, прошивка 1,9а2.
При старте взлетает вертикально, но на другие стики кроме собственно газа вообще не реагирует. В следующие старты вообще взлетает на 30 см, дергается, как будто не хватает тока для работы двигателей, и пытается упасть… что это может быть? Из датчиков включены только гира и аксель.
А вот кто что посоветует, собрал квадрик, моторы rctimer 2830 750kv, винты 11х45, регуляторы turnigy plush 30a, батарея 3s 20-30c 2700мач, плата freeimu2, прошивка 1,9а2.
При старте взлетает вертикально, но на другие стики кроме собственно газа вообще не реагирует. В следующие старты вообще взлетает на 30 см, дергается, как будто не хватает тока для работы двигателей, и пытается упасть… что это может быть? Из датчиков включены только гира и аксель.
скриншот гуя выложите
Я себе заказал MTK3339… NMEA держит… должно быть ОК… www.aliexpress.com/product-gs...olesalers.html
У меня такой есть! Поделитесь опытом, когда прикрутите?
а зачем I2C? NMEA и вперед!
При условии, если у вас ардуина мега…
вот именно, если контроллер мега2560; с другими, менее ногастыми и портастыми, такая штука не проходит. 😉
тут как бы шило на мыло - либо еще одна дополнительная мега 168(256) для конвертера, либо плата с 2560. по-моему по совокупной цене деталек примерно одинаково будет )
Да верю)))) Но на самом деле статья там эта давно, ту что вы приводили, ее там выложили почти сразу после публикации на форуме, а сейчас я смотрю сайт немного переделали. Потому что когда я последний раз заходил меню по другому было организовано. В общем в любом случае сайт полезный и новечковые вопросы отпадают если все внимательно почитать.
Глеб отписался в личку, что небыло там статьи и что на днях ее добавил…
@tda2030 Дима, может всеж отрелизишь финальный вариант?! 😉
p.s. по GPS от Глеба: "и там еще по поводу i2c… это не тот i2c что думают - там через i2c не голый приемник, а ардуинка с кодом, которые рулит всякими GPS плюшками, для 328 чипа НЕТ пока что никакого нормального варианта подключения GPS, есть вариант с убиванием всеего Serial функуионала и вместо него NMEA приемник"
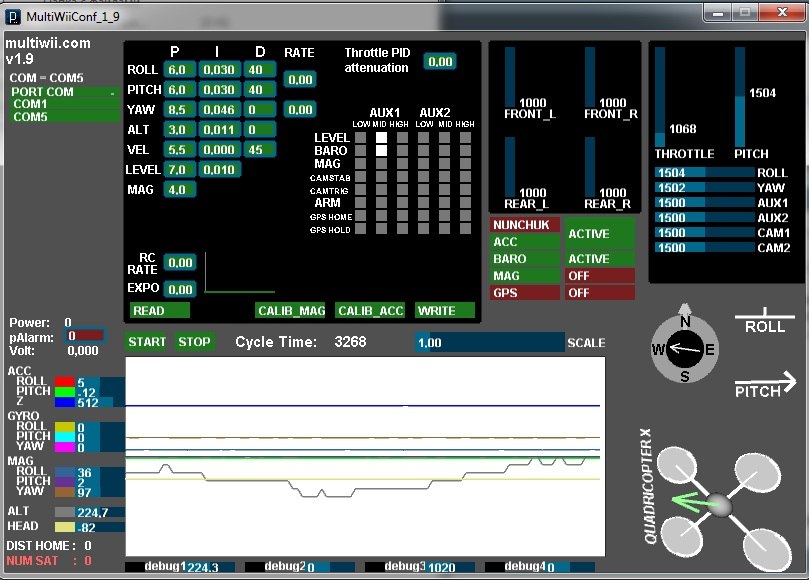
скриншот гуя выложите
вот, пожалуйста:
моторы rctimer 2830 750kv, винты 11х45, регуляторы turnigy plush 30a, батарея 3s 20-30c 2700мач, плата freeimu2, прошивка 1,9а2.
При старте взлетает вертикально, но на другие стики кроме собственно газа вообще не реагирует. В следующие старты вообще взлетает на 30 см, болтается-дергается, как будто не хватает тока для работы двигателей, и пытается упасть… что это может быть? Из датчиков включены только гира и аксель.
Из датчиков включены только гира и аксель.
Ну по картинке еще баро. И на низкой высоте порядка 30 см. с баро будет колбасить мама не горюй.
Я баро включаю от 3 метров.
А в гуи есть движения стиков?
Ну по картинке еще баро. И на низкой высоте порядка 30 см. с баро будет колбасить мама не горюй.
Я баро включаю от 3 метров.
А в гуи есть движения стиков?
Да, баро уже отключил)
В гуи движения стиков есть.
Грешу на график rc rate и rc expo. надо наверное что то большее от ноля поставить.
Update:
выключил баро, поставил rcrate 0,96 и rcexpo 0,70, запараллелил 2 аккума по 2200 3s 25с, все равно дергается и даже не желает подниматься вообще(((
p.s. по GPS от Глеба: "и там еще по поводу i2c… это не тот i2c что думают - там через i2c не голый приемник, а ардуинка с кодом, которые рулит всякими GPS плюшками, для 328 чипа НЕТ пока что никакого нормального варианта подключения GPS, есть вариант с убиванием всеего Serial функуионала и вместо него NMEA приемник"
о,а подробнее, если я замучу отдельно с 168ой или 328ой мегой i2c gps и подключу к основному вию я что-то потеряю кроме cycle time ?
Просто сейчас сижу составляю потихоньку в корзинку себе заказик , и 2560 мега выходит явно дороже чем две 328ые меги замутить даже с самым дорогим обвесом и дорогущими мелко-кварцами.
вот, пожалуйста:
у вас rc rate на нуле, сделайте 0,9 - 1 экспоненту по вкусу, у меня 0,25
аксель нажмте calibrate, там у вас аж 512 ось Z, вроде не более 254 обычно
Да, баро уже отключил)
В гуи движения стиков есть.
Грешу на график rc rate и rc expo. надо наверное что то большее от ноля поставить.Update:
выключил баро, поставил rcrate 0,96 и rcexpo 0,70, запараллелил 2 аккума по 2200 3s 25с, все равно дергается и даже не желает подниматься вообще(((
попробуйте побороть аксель , и может thrusted acc Z закомментить, хотя это хз.
Не поможет вырубите level, подлетните только на гире, заодно пиды подстроите по феншую начиная с P. expo 0,7 это дофига
З.Ы. Если полетит то Level на место и " I "Pitch Roll Yaw все по 0.010 D Pitch roll 0
Повесил АРМ на тумблер, сажусь, клацаю, и тут квадр решил, что ему чем-то не понравился рядом стоящий стул, и на всем газу карает этот стул ))) Хорошо, что 2-м пропам тут же крышка, иначе еще бы что-нибудь или кого-нибудь покарал бы 😁
мораль то усвоили? если не включается не надо заставлять.
Ну наконец подружил блютус с квадриком и андройдом ,обещают графики на днях поставить.
omegapraim, это, извиняюсь, Вы к чему сказали? Что значит-не надо заставлять?
Для полноты повествования добавлю, до этого момента несколько армингов-дисармингов тумблером проходили без проблем.
ЗЫ Что-то я смотрю, Вы последнее время придираетесь к моим постам, интересна причина…
Вон чего нагородили… На двадцатку бы дешевле - взял бы. Одних портов 5 штук…
Вон чего нагородили… На двадцатку бы дешевле - взял бы. Одних портов 5 штук…
а за что такие деньги?
о,а подробнее, если я замучу отдельно с 168ой или 328ой мегой i2c gps и подключу к основному вию я что-то потеряю кроме cycle time ? Просто сейчас сижу составляю потихоньку в корзинку себе заказик , и 2560 мега выходит явно дороже чем две 328ые меги замутить даже с самым дорогим обвесом и дорогущими мелко-кварцами.
это Глебу в личку пиши… а ответ сюда пости! 😉
GPS on 328 mega: www.multiwii.com/forum/viewtopic.php?f=7&t=1654 прям как по заказу… ток запостили ))
p.s. уломал АлексаВПариже таки на использование флоат филтра в ИМУ для акселя + фактор гиры поднят на 400 + ПИДы по умолчанию для левел мода теперь более правильние… читать тут
так что теперь ДЕВ прошивка свежая почти не отличается от алтернативных 😉
аксель нажмте calibrate, там у вас аж 512 ось Z, вроде не более 254 обычно
а сейчас вот по рукам за такие советы! 😃
у каждого акселя свой acc_1G параметр (кол-во единиц на ускорение в 1G)… смотреть в Sensors.pde… тоже значение должно быть на оси Z после калибровки…
Вон чего нагородили… На двадцатку бы дешевле - взял бы. Одних портов 5 штук…
Какая кульная штука 😃 Наверно, и на мегапират пойдет.
аксель нажмте calibrate, там у вас аж 512 ось Z, вроде не более 254 обычно
попробуйте побороть аксель , и может thrusted acc Z закомментить, хотя это хз.
Не поможет вырубите level, подлетните только на гире, заодно пиды подстроите по феншую начиная с P. expo 0,7 это дофигаЗ.Ы. Если полетит то Level на место и " I "Pitch Roll Yaw все по 0.010 D Pitch roll 0
вот что то непонятно, и так, и сяк пробовал, но не выходит, ось Я все равно 512. нажимаю calibrate - график опускается до нуля, и тут же снова подскакивает до 512… может аксель косячный?
в коде поправки делал - не получилось исправить.
вот что то непонятно, и так, и сяк пробовал, но не выходит, ось Я все равно 512. нажимаю calibrate - график опускается до нуля, и тут же снова подскакивает до 512… может аксель косячный?
так и должно быть… все ок… проверьте лучше полярность осей www.multiwii.com/faq#How_should_be_the_sensor_axis…
Для тех кто любит хэнд-мэйд плата с 2560АТмегой+плата с датчиками,правда относительно экзотическими)))
Файл в формате Спринта,по идее можно уместить все датчики на одной плате,но ИМХО лучше иметь раздельные платы.
LLC я не использовал(на плате разведен),одинаково работает и без него при наличии подтягивающих резисторов номиналом 4.7К.
Размер кварца весьма экзотический.
По сравнению с 328 на много удобней,можно цеплять много моторов и ГПС без всяких доп преобразователей и РРМ сумматоров.