MultiWii

если вы собрались по i2c цеплять к криусу и ему подобным с 328p чипом, то я уже 100500 раз писал что от этого толку нет, т.к. нынешний i2c код расчитан на связку uartgps+328p (и вот уже эта связка выступает i2c устройством)
а если не к криусу, то тогда не понятно зачем вообще заморачиваться с I2C, если есть свободные UART?
upd: вот это не на него даташит? dz863.com/datasheet-8404442663-NEO-6M-0-001_U-blox…
если оно, то интерфейсы UART, SPI, DCC (написано что как i2c) и USB
Я его буду цеплять по serial на плату мегапирата с датчиками, которую мне удалось успеть купить за 41 уй.
Про резкие повороты.
Кажется все банально, но сомнения остаются. Начал с простого - проверил балансировку пропеллеров и выкосы двигателей. Один из пропеллеров был не очень, но в пределах того, что я обычно допускаю.
Отвисел один аккумулятор дома. Пока все идеально. Вечером пойду пробовать на улице.
Попутно возник вопрос. Есть ли возможность записать подробные данные телеметрии в полете в какой-нибудь адекватный вид (наподобии мегапирата)? Записать видео с gui могу, но как-то это некрасиво…
Есть ли возможность записать подробные данные телеметрии в полете в какой-нибудь адекватный вид (наподобии мегапирата)?
Люди знающие подскажите пожалуйста какой датчик на нунчаке стоит и вообще пойдет ли оно?
На нунчаке стоит аналоговый 3-х осевой акселерометр точно… у меня такой же попался
На нунчаке стоит аналоговый 3-х осевой акселерометр точно… у меня такой же попался
Да спасибо вродебы уже получил ответ на вопрос от SovGVD.
Сегодня решил посмотреть осциллографом по контрольным точкам, самый простой аксель вызвал у меня реально сказать бурю эмоций в плане его работы… поняв принцип работы устройства я начал допирать а почему же мультик висит - на то есть классный датчик реального положения в пространстве. т.е. внутри датчика как будто шарик на резинках и мозг чипа просто выдает силу натяжения нитей внутри. я подозреваю что в невесомости акселерометр даст показания 0,0,0 )))
Еще вопрос назрел а если самим плату сделать и напаять датчиков на 4-х слое можно натыкать датчики прям все все рядышком.
Аксель и гиру друг над другом воткнуть прям в центре, магнетометр баро и GPS где угодно…
Если платформа хорошая и тем более универсальная… у меня допустим уже отрисованая схема модуля EB-500 совместно с патч антеной 25х25 есть…
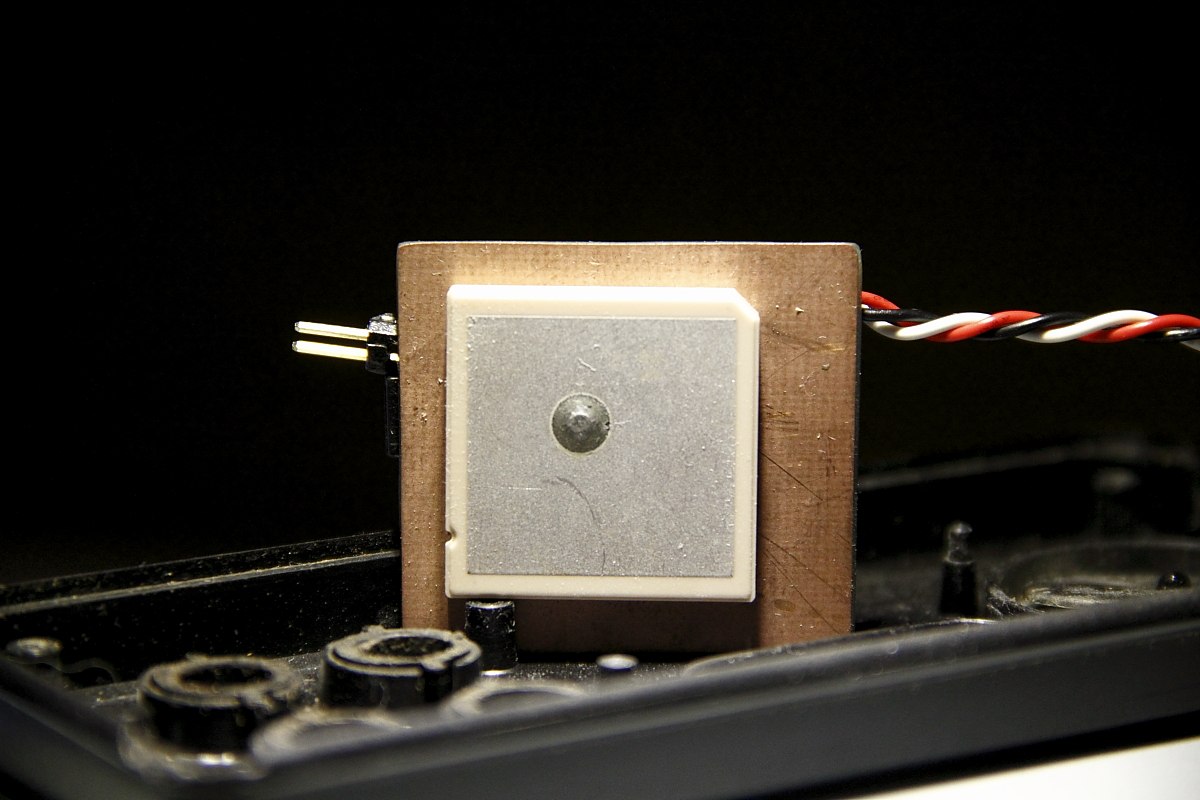
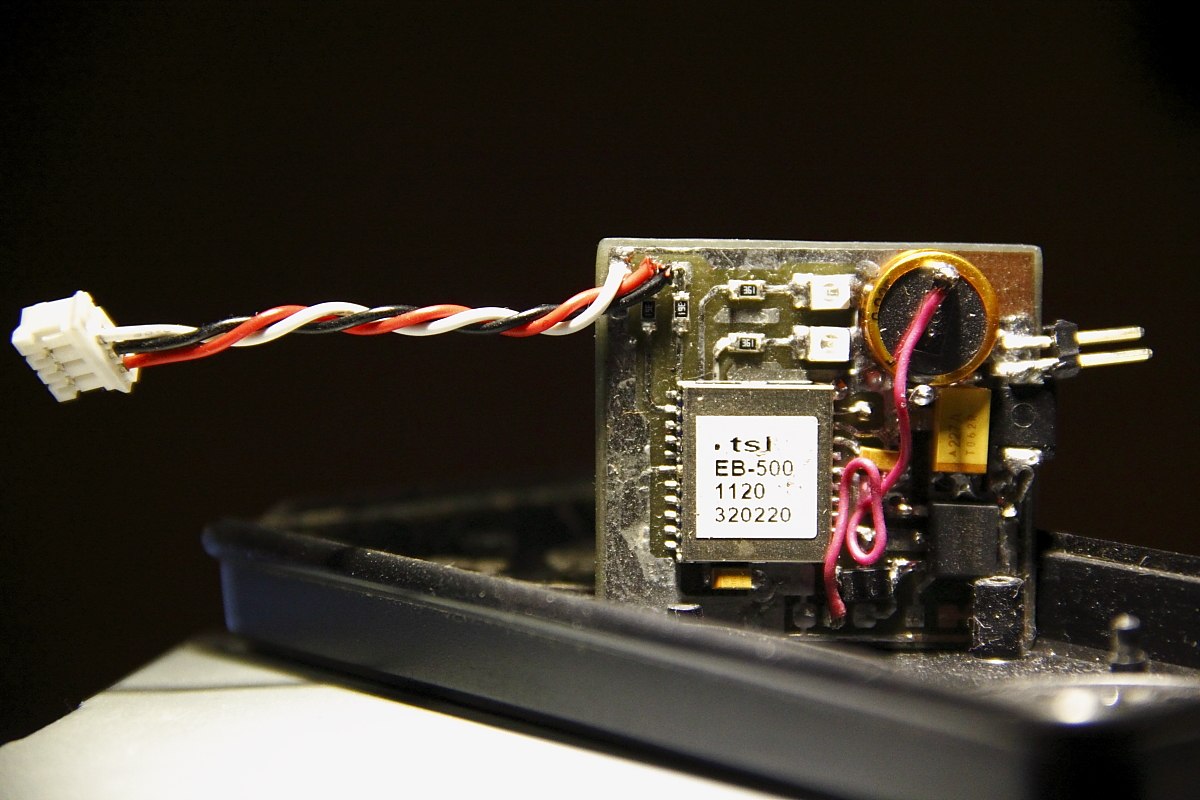
вместе с антенной вышло около 18-25 баксов
воткнуть прям в центре, магнетометр
и писец данным с него… магнитометр надо как можно дальше от всего выносить - иначе кроме направления на провода питания ничего не увидеть им
пора ГПС прикручивать… как раз приехал mtk3339 ))
www.multiwii.com/forum/viewtopic.php?f=8&t=649&sta…
ток както долго коннектится… 5-7 спутников собирает минуту-полторы… кто знает, это нормально?
5-7 спутников собирает минуту-полторы… кто знает, это нормально?
если холодный старт и приемник не на улице (или рядом с помехами) то вполне нормально
я вот себе уже сделал даже на макетке для криуса

но чето никак не затестирую =(
если холодный старт и приемник не на улице (или рядом с помехами) то вполне нормально
Ну ГПС без батарейки, значит холодный.
А около окна вообще не ловил. Один раз законнектился, но на это ушло 10-15 мин, когда чай пошел пить )) Странно, а вроде писали, что он более чувствительный чем 3329… купился… И дом даже не железобетон, а 3-хэтажка деревянная, где я на втором… Или пофиг дерево бетон, т.е. сам факт что через перекрытие не идет сигнал?
В итоге вытащил на балкон и тогда за минуту спутников набрал…
/me имеет holux m1000, холодный старт, за 1-2 минуты в железобетонном доме ловит 6-7 спутников, на улице до 12 без проблем 😉
для криуса
там чел пишет про фикс от Патрика для авто выборки ГУИ/ГПС
www.multiwii.com/forum/viewtopic.php?f=8&t=649&sta…
www.multiwii.com/forum/viewtopic.php?f=8&t=1569&st…
авто выборки ГУИ/ГПС
я не хочу там извратом заниматься, пусть лучше 2 CPU будет - один под горизонт и высоту, другой только GPS функуионал (да и всё уже спаянно, только залить прошивку и соеденить воедино)
/me имеет holux m1000, холодный старт, за 1-2 минуты в железобетонном доме ловит 6-7 спутников, на улице до 12 без проблем
для RTH и PH очень важен еще update rate 5…10hz
поддерживает?
и где брал и по чем? ))
поддерживает?
знать бы как измерить (UART отдает 33.6кбит/с, но как часто сами данные обновляются - не знаю)… а брал года 2 или 3 назад на DX, он и сейчас там есть
я не хочу там извратом заниматься, пусть лучше 2 CPU будет - один под горизонт и высоту, другой только GPS функуионал
в текущей прошивке от EOSBandi даже с I2C_GPS обсчет последнего все равно в основном контроллере (там где IMU), а второй только данные с gps по i2c отдает…
в текущей прошивке от EOSBandi даже с I2C_GPS обсчет последнего все равно в основном контроллере (там где IMU), а второй только данные с gps по i2c отдает…
может быть, когда нибудь, но чую это всё быстрее на арм переселится… тем не менее всё спаяно и обратной дороги нет 😉
знать бы как измерить
в консоль выведи, и по идее с той частотой, с которой, увидишь новые НМЕА строки - оно и есть … но по идее ))
ток както долго коннектится… 5-7 спутников собирает минуту-полторы… кто знает, это нормально?
не знаю как у вас у меня ЕВ-шник за 4 секунды самое быстрое с момента подачи питания уже дает 3д ориентирование и видит 8-12 спутников сразу, через 10сек добавляется еще 3-4 в зависимости от положения.
Нюанс Перед этим включением приемник сутки находился включенным на открытой местности, чтоб полностью заполнить “альманах”, резервное ионистор на 0.47Ф
Ну ладно… дошли руки до GPS

пока что вот такая красота о_0… завтра, если будет время, залью с нормальным конфигом и почищу eeprom, как указанно в мане
зы: 7 спутников - приемник лежит далеко от окна в центре комнаты
конфиг: crius lite + i2c-nav платка с bmp085, gps и компасом (ничего не калибровал еще)
Ну наконец пришла ко мне Mega2560 с гудлака.😆
Во избежании всяких китайских ошибок переустановил сам Бут ардуины(при проверке Бута нашёл пару косяков).
Надписи ужасные,целый час потратил на подключение.

На сенсорах нашёл недопилиные дырочки,решил допилить.


И установил такую стаб. платформу.

Датчики ,догрузил бронзовымы пластинами.
Для подключения датчиков в MultiWii-2_0.
config.h
...
//#define FREEIMUv1 // v0.1 & v0.2 & v0.3 version of 9DOF board from Fabio
//#define FREEIMUv03 // FreeIMU v0.3 and v0.3.1
//#define FREEIMUv035 // FreeIMU v0.3.5 no baro
//#define FREEIMUv035_MS // FreeIMU v0.3.5_MS <- confirmed by Alex
#define FREEIMUv035_BMP // FreeIMU v0.3.5_MS
...
//enable internal I2C pull ups
//#define INTERNAL_I2C_PULLUPS
def.h
#if defined(FREEIMUv035) || defined(FREEIMUv035_MS) || defined(FREEIMUv035_BMP)
#define ITG3200
#define BMA180
#define HMC5883
#define ACC_ORIENTATION(X, Y, Z) {accADC[ROLL] = -X; accADC[PITCH] = -Y; accADC[YAW] = Z;}
#define GYRO_ORIENTATION(X, Y, Z) {gyroADC[ROLL] = Y; gyroADC[PITCH] = -X; gyroADC[YAW] = -Z;}
#define MAG_ORIENTATION(X, Y, Z) {magADC[ROLL] = -X; magADC[PITCH] = -Y; magADC[YAW] = Z;}
#undef INTERNAL_I2C_PULLUPS
Пока,кроме некоторых надписей,возражений нет.

P.S.Что-то не вижу LLC,в Mega2560 ставить надо?