MultiWii

Подскажите имею такой девайсы
платка Crius Multiwii Lite v0.2
и Oled дисплейчик
подскажите в какой порт его подулючать?
что касательно прошивки вроде все расскоментировано.
подскажите в какой порт его подулючать?
Вам без паяльника не обойтись, его цепляют на i2c, а на Вашей плате разъемчик отсутствует.
У меня тоже очередные вопросы имеются - перестраиваю плату на летающее крыло, 500гц на ESC для него явный перебор, это:
#define USE_THROTTLESERVO // For use of standard 50Hz servo on throttle.
не помогает.
Что нужно поменять, чтобы было 50 гц?
И второй затык с армом - не нужен он на самолете, тем более планирующем. Совсем не хотелось бы, чтобы после очередного отключения двигатель не включился.
И третий - чего только не комментировал и не менял - минимальная длина импульса на мотор 1150
#define MINTHROTTLE 1000
не помогает.
eeprom почистите и будет вам счастье, а то оно на новые дефайны не смотрит, а смотрит, что у него в еепром прописано, а там старые значения…
eeprom почистите и будет вам счастье, а то оно на новые дефайны не смотрит, а смотрит, что у него в еепром прописано, а там старые значения…
К сожалению, полное счастье не наступило. Минимальная длина пульса установилась, а вот что делать с частотой и армом - по-прежнему вопрос. Тупое решение - сделать арм при любом положении AUX1 не работает.
Что-то со счастьем сегодня напряженка.
Даже пытаюсь переназначить выводы - и то не работает
#define PRI_SERVO_FROM 5 // use servo from 1 to 2
#define PRI_SERVO_TO 6
С мотором тоже - вроде как надо подменить мотор сервой здесь
#if defined(FLYING_WING)
motor[0] = rcCommand[THROTTLE];
if (f.PASSTHRU_MODE) {// do not use sensors for correction, simple 2 channel mixing
servo[0] = PITCH_DIRECTION_L * (rcData[PITCH]-MIDRC) + ROLL_DIRECTION_L * (rcData[ROLL]-MIDRC);
servo[1] = PITCH_DIRECTION_R * (rcData[PITCH]-MIDRC) + ROLL_DIRECTION_R * (rcData[ROLL]-MIDRC);
} else { // use sensors to correct (gyro only or gyro+acc according to aux1/aux2 configuration
servo[0] = PITCH_DIRECTION_L * axisPID[PITCH] + ROLL_DIRECTION_L * axisPID[ROLL];
servo[1] = PITCH_DIRECTION_R * axisPID[PITCH] + ROLL_DIRECTION_R * axisPID[ROLL];
}
servo[0] = constrain(servo[0] + conf.wing_left_mid , WING_LEFT_MIN, WING_LEFT_MAX );
servo[1] = constrain(servo[1] + conf.wing_right_mid, WING_RIGHT_MIN, WING_RIGHT_MAX);
#endif
пытаюсь отключить массив моторов и подменить дополнительной сервой
// #define NUMBER_MOTOR 1
#define NUMBER_MOTOR 0
и все равно не выходит каменный цветок, даже GUI перестает все отображать 😦
Убил полностью исходники, начал править по новой
#elif defined(FLYING_WING)
#define NUMBER_MOTOR 0
#define PRI_SERVO_FROM 1 // use servo from 1 to 2
#define PRI_SERVO_TO 3
и так
#if defined(FLYING_WING)
//motor[0] = rcCommand[THROTTLE];
if (!f.ARMED){
servo[2] = MINCOMMAND; // Kill throttle when disarmed
} else {
servo[2] = rcData[THROTTLE];
}
if (f.PASSTHRU_MODE) {// do not use sensors for correction, simple 2 channel mixing
servo[0] = PITCH_DIRECTION_L * (rcData[PITCH]-MIDRC) + ROLL_DIRECTION_L * (rcData[ROLL]-MIDRC);
servo[1] = PITCH_DIRECTION_R * (rcData[PITCH]-MIDRC) + ROLL_DIRECTION_R * (rcData[ROLL]-MIDRC);
} else { // use sensors to correct (gyro only or gyro+acc according to aux1/aux2 configuration
servo[0] = PITCH_DIRECTION_L * axisPID[PITCH] + ROLL_DIRECTION_L * axisPID[ROLL];
servo[1] = PITCH_DIRECTION_R * axisPID[PITCH] + ROLL_DIRECTION_R * axisPID[ROLL];
}
servo[0] = constrain(servo[0] + conf.wing_left_mid , WING_LEFT_MIN, WING_LEFT_MAX );
servo[1] = constrain(servo[1] + conf.wing_right_mid, WING_RIGHT_MIN, WING_RIGHT_MAX);
#endif
теперь почему-то заработало.
Но при дизарме мотор включается на максимум. Хоть на приемник напрямую мотор вешай, но хотелось бы обойтись приемником с SPPM только.
Ну и в GUI mot больше не отображается.
Подскажите пожалуйста.
ведь можно одновременно подключить бортовой аккумулятор и usb кабель, чтобы в GUI наблюдать обороты двигателей?
В связи с проблемами с доменным именем сайт переехал по адресу multiwiifaq.ts9.ru
можно одновременно подключить бортовой аккумулятор и usb кабель
Да, можно. Только не обороты, а уровень сигнала на каждом двигателе.
В прошивке, есть строчка для активизации управления (движками) с помощью ШИМ, а на выходы контроллера ставятся транзисторные ключи…
Где про это прочитать ? также по какой схеме ключи запаивать ?
Мосфеты нужны N канальные или P канальные ?

Ключи уже есть
Это фотка из инета как выглядит готовое .
У меня обычная мультивий плата криус. Там нет ключей !
очередной вопрос:разёмы допоял экранчик ожил,и на этом все закончилось,на экране горит только версия прошивки и тип коптера
Вопрос: как зайти в меню настройки,может чтото снова надо чтото расскоментировать?
Это фотка из инета как выглядит готовое .
У меня обычная мультивий плата криус. Там нет ключей !
Может эту строчку надо расскомментировать?
/********************************** PWM Setup **********************************/
//#define HWPWM6
А ключи-выходной каскад как в коллекторном регуле без реверса?
и
N-канальные ключи
,на экране горит только версия прошивки и тип коптера
Должна загореться и тухнуть
Паяли кондёр и резистор на резет дисплея?
как зайти в меню настройки
Посибки получилось.
вот ешё проблемка зачастую снег на экране,как лечить?
Посибки получилось.
вот ешё проблемка зачастую снег на экране,как лечить?
Паяли кондёр и резистор на резет дисплея?
Наверное PPM-ом.
В заблуждение ввела вот эта фотка с www.multiwii.com/faq#Be_sure_your_ESC_can_support_…
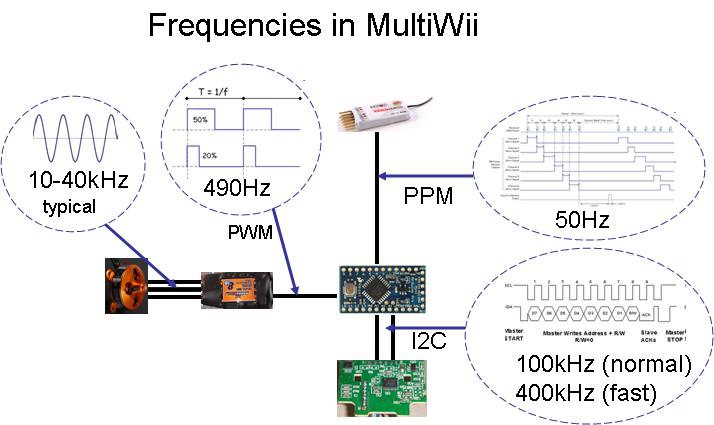
😵
да еще и эта тема Прошивка ESC Mystery 20A 400Hz PWM
😃
вот ешё проблемка зачастую снег на экране,как лечить?
Было так же. Впаял резистор на 120 Ом по питанию и все заработало.
Было так же. Впаял резистор на 120 Ом по питанию и все заработало.
А пальцем тыкнуть на фото можеш куда паять?
доброе время суток! Небольшая проблема с платой MultiWii MicroWii на ней есть UART в прошивке 2.2 с него легко взять телеметрию (использую OSD) но как только раскомментирую GPS (I2C) прошивка не влазит в память. Перехожу на 2.1 (и что ниже)все входит но по UART нет телеметрии . Пробовал залить через программатор но видимо микросхема 32U4 специфичная область памяти загрузчика трогать нельзя. Прошу помощи. как мне активировать UART в 2.1 или есть какие прошивки где работает GPS (I2C) +UART с телеметрией. В просторах инета я ответа не нашел. Самому найти в прошивке что раскомментировать что бы UART заработал не получается.