MultiWii

Вот явный пример того, о чем я говорил выше, к примеру вы имеете 2 эти платы, и решили их скрестить.
Подтягивающие резисторы на верхней плате с подпаяными проводниками, на нижней это R2 и R3:
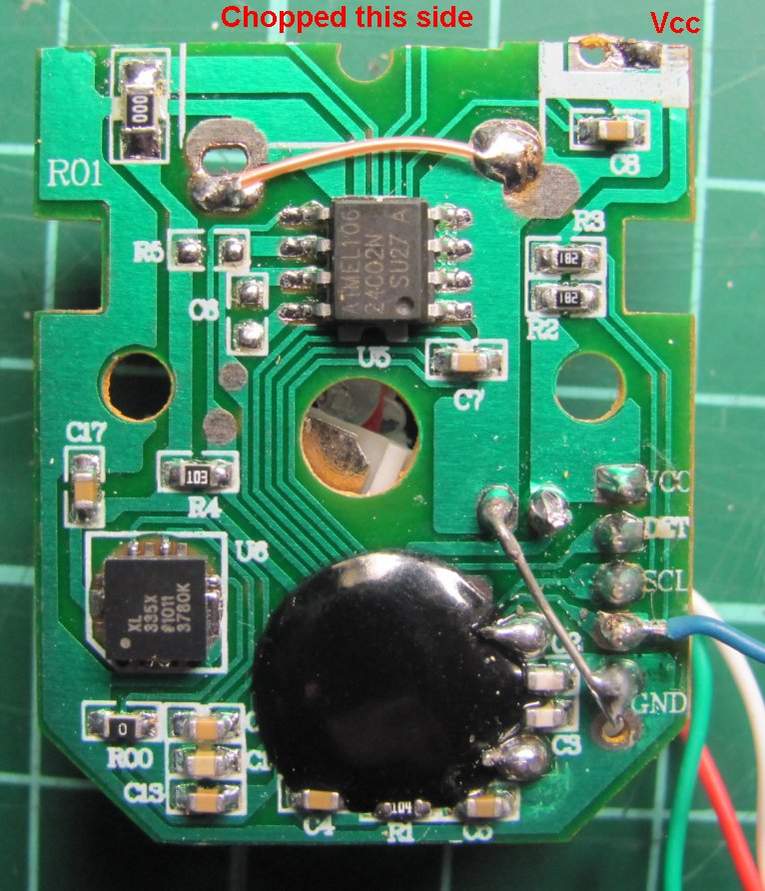
На первой по i2c стоят сопротивления 2к на второй 1.8к, по формуле (r1*r2)/(r1+r2) выходит 0.95к соответстенно логический 0 вы не получите, или получите на столько нестабильный, что ничего работать нормально не будет, так что смотрите сопротивления по шине внимательно…
Одна гира запускается, а когда подрубаете аксель, всё уходит вникуда.
Насчет самому паять датчики, выкладываю свои платы.
Базовая плата сделана под нано, приемник HobbyKing T6A без сателлита садиться на разъем прямо на плату. Питание с D12 через регулятор LM1117 на 3,3 В. На плате сделан преобразователь уровня 5 - 3,3 В (2 транзистора SN7002 и 4 резистора на 10 К)
схема из www.gaw.ru/html.cgi/txt/publ/interface/97055.htm
Платы датчиков на унифицированных по выводам отдельных платах, устанавливаются на цанговых разъемах сендвичем.
Платы датчиков ADXL345 и bmp085 сделаны (по даташитам), проверены, нормально работают.
По itgl3200 придет Wii+ на itgl3205 будем проверять.
Это ж где такая халява на оригинал, можно ссылку? Оригинал, кстати, тоже в Китае клепают, как минимум корпус)
www.consolestore.ru/…/wii-motion-wh/
Естесно в Китае, важно кто и как.
Это ж где такая халява на оригинал, можно ссылку? Оригинал, кстати, тоже в Китае клепают, как минимум корпус)
Здравствуйте
брал здесь www.xboxland.net/forum/index.php?showtopic=78044
плата как на фото по вашей ссылке
Подскажите по проблеме. Подключаю к ардуине вий - все работаен адекватно, корректно реагирует на наклоны, если лежит на месте то все графики идут одной линией. Но при подключении нунчака одна ось отходит от всех на 200 единиц, резко повышается чувствительность по всем осям. При резком наклоне вправо крыло на экране поворачивает тоже вправо, а при наклоне влево - сначало вправо а затем уже влево. Вий и нунчак с DX. Скетч для летающего крыла. Что делать и кто виноват?
Подскажите по проблеме.
Кнопочку калибрэйшн нажимали???
одна ось отходит от всех на 200 единиц
Синяя так и должно быть
резко повышается чувствительность по всем осям
надо смотреть какой цикл и менять interleaving
но мне помог переход с D12 на 3v3
Кнопочку калибрэйшн нажимали???
Это крыло. Там ее нет.
надо смотреть какой цикл
Уже не посмотрю. Что-то стало с нунчаком. Перепаял и он перестал определяться. Когда подключаю к шиннам не видит даже вий.
…Это крыло. Там ее нет.
😃) кого нет? вы же multiiwii плату собираете, калибровали нунчак? какая прошивка у вас?
Ну чтож, игрушка вроде полетела, есть вопросы:
при полете с нунчаком, все хорошо, только иногда (1н раз в 10-20 сек.) вздрагивает.
и самое главное при отпускании стика правого, идет приличный крен назад, если немного держать стик вперед, то висит отлично.
калибровал и ровно на столе и немного вперед наклоняя и немного назад, всеравно тянет назад! что с этим сделать?
при полете без нунчака, в руках гирики вроде прилично держут, но в полете мало, постоянно раскачивается. если добавить PID то при полете с нунчаком уже начинается тряска.
прошивка самая последняя.
Отдельное спасибо Siberian за подсказку по хвостовой серве (отказывалась работать)
гдеб увидеть описание , что делают цифры в GUI , кроме PID , что делают все остальные?
Пилять! Достала меня эта мультипульти 😃 Вчера вот до первой крови доигрался! Осторожно, мальчики, если у Вас силовая ака подключена и пепелац еще по USB в комп воткнут и ГУИ работает, а вам вруг позвонили в телефон-не дергайтесь, ведь если USB шнурок выпрыгнет вместе с вами из компа-есть шанс увидеть какого цвета у Вас кровь, я вчера увидел, еще и пульт упал на пол и поддал жару!!! 😦
Второй день пляшу с бубном вокруг собранного наконец-то Себе квадрика и чтот мне его поведение ну совсем не нравится, все предыдущие летали изумительно но как только начал себе делать любимому-фортуна почемуто наровит ко мне жопой развернуться!
В итоге сегодня утром поменяв демпфера под датчиком удалось получить более менее сносное висение но все равно какие-толчки по высоте почему-то присутствуют
А как Гиры затупить случаем никто не знает, чего-то я пропустил похоже, сил моих больше нетути
прошивал перепрошивал, менял питание, причем у меня датчики одинаково работают и от 5 вольт и от 3.3
А как Гиры затупить
rcopen.com/forum/f123/topic221574/838 тут посмотрите
Спасибо! хоть у меня и не ITG IDG 650 но думаю все равно должно сработать
всеравно тянет назад
Полезно проверить ориентацию платы нунчака относительно рамы - мозг выравнивает в горизонт именно ее, а не коптер.
На меня хоть и не прыгал квадрик, но один раз в гостинной под рождество, при кучу народу родственников я решил продемонстрировать как его прет преодолеть притяжение. Не знаю что там произошло, но в какойто момент двигатели рванули на максимум. Ладно кисть инстинктивно сжалась и я поймал квадрик… Так что будьте аккуратны.
Полезно проверить ориентацию платы нунчака относительно рамы - мозг выравнивает в горизонт именно ее, а не коптер.
А разве калибровка не призвана для установки горизонта по раме (если она была горизонтальна при калибровке)?
А разве калибровка не призвана для установки горизонта по раме (если она была горизонтальна при калибровке)?
Если нунчак изначально неправильно сориентирован, то никакая калибровка не поможет.
Если нунчак изначально неправильно сориентирован, то никакая калибровка не поможет.
А каков максимальный угол расхождения горизонтов нунчака и рамы, чтобы калибровка помогала?
кого нет?
Кнопки калибрейшн. Прошивка для стабилизации летающего крыла. www.rcgroups.com/forums/showpost.php?p=17026044&po…
Если нунчак изначально неправильно сориентирован, то никакая калибровка не поможет.
тоесть если трикоптера тянет назад, то нунчак нужно наклонить относительно рамы чуть назад? чтоб компенсировать этот угол?
калибровал и ровно и криво, не помогает.
вот примерно что получилось
тоесть если трикоптера тянет назад, то нунчак нужно наклонить относительно рамы чуть назад? чтоб компенсировать этот угол?
Это не в полете проверяется!
- сначала проверяем в ГУИ как графики себя ведут:
- при наклоне коптера вправо ACC_ROLL и GIRO_ROLL (или как там его) должны изменяться в положительную сторону. влево - отрицательную.
- при наклоне вперед ACC_PITCH и GYRO_PITCH должны изменяться в положительную сторону, назад - отрицательную.
- Ставим коптер на ровную поверхность, берем уровень и прикладываем к мотору или основанию винта, куда можете приложить. вот именно эти точки у всех трех-четырех моторов должны быть на одном уровне. Выставили моторы-пропы по уровню - калибруем акселерометр. Вот теперь у вас в воздухе коптер будет висеть в режиме стабилизации точно по горизонту.
- Если чуть чуть коптер все равно плывет - триммируем аппаратуру, регулируем ПИДы.
Подскажите пожалуйста, что значат выделенные записи:
#define DIGITAL_TILT_ROLL_PINMODE pinMode(A1,OUTPUT);
#define DIGITAL_TILT_ROLL_HIGH PORTF |= 1<<1;
#define DIGITAL_TILT_ROLL_LOW PORTF &= ~(1<<1);
Это если ты камерку хочешь повесить на пан-тилт и чтобы она типа стабилизировалась при отклонениях коптера.
Это я как раз понял,
сейчас изучаю код для добавления стабилизации и по “YAW”
интересует что значит:
PORTF |= 1<<1;
PORTF &= ~(1<<1);
Просто для PITCH одни значения((1<<0)), для ROLL - другие, хочу понять какие писать для YAW.
Это не в полете проверяется!
- сначала проверяем в ГУИ как графики себя ведут:
- при наклоне коптера вправо ACC_ROLL и GIRO_ROLL (или как там его) должны изменяться в положительную сторону. влево - отрицательную.
- при наклоне вперед ACC_PITCH и GYRO_PITCH должны изменяться в положительную сторону, назад - отрицательную.
- Ставим коптер на ровную поверхность, берем уровень и прикладываем к мотору или основанию винта, куда можете приложить. вот именно эти точки у всех трех-четырех моторов должны быть на одном уровне. Выставили моторы-пропы по уровню - калибруем акселерометр. Вот теперь у вас в воздухе коптер будет висеть в режиме стабилизации точно по горизонту.
- Если чуть чуть коптер все равно плывет - триммируем аппаратуру, регулируем ПИДы.
понял, задний винт у меня немного ниже уровня, что мне делать? подогнуть луч? и сделать калибровку? в ГУИ все графики ездят как надо.